Download as pdf or txt
You might also like
- Forced Oscillations Lab Report Draft 1Document13 pagesForced Oscillations Lab Report Draft 1Praveen Dennis XavierNo ratings yet
- Aerody Quizlet 489Document62 pagesAerody Quizlet 489Jecah Angelu S. SaquianNo ratings yet
- Longitudinal and Transverse VibrationsDocument14 pagesLongitudinal and Transverse Vibrationsذوالفقار علي حسينNo ratings yet
- Best Ignored: Force Constant "K"Document3 pagesBest Ignored: Force Constant "K"Tuan TranNo ratings yet
- 40 Sample ChapterDocument15 pages40 Sample ChapterarjunNo ratings yet
- Chap 1 OscillationsDocument53 pagesChap 1 OscillationskhaledstephannNo ratings yet
- Spring Mass Experiment Student SheetDocument8 pagesSpring Mass Experiment Student SheetThảo Hà NguyễnNo ratings yet
- WO Lecture 1Document12 pagesWO Lecture 1RaadNo ratings yet
- Radioactivity 1Document10 pagesRadioactivity 1subhajana646No ratings yet
- Crystal VibrationDocument22 pagesCrystal VibrationParkfest AradacNo ratings yet
- Terebilo 1998 0399Document5 pagesTerebilo 1998 0399Particle Beam Physics LabNo ratings yet
- MCE 233 Mechanics of Machines III Part 1Document42 pagesMCE 233 Mechanics of Machines III Part 1Emmanuel KutaniNo ratings yet
- Physics Mid-Sem CompilationDocument220 pagesPhysics Mid-Sem Compilationdhruv goraiNo ratings yet
- HCL DataDocument4 pagesHCL DataRoberta Lopes de PaulaNo ratings yet
- Mechanical OscylationsDocument4 pagesMechanical Oscylationsz.sawczyn5No ratings yet
- ch1 - Review of QEDocument21 pagesch1 - Review of QEfuyoungNo ratings yet
- Chapter 13Document14 pagesChapter 13Adrian PredaNo ratings yet
- Chapter 9 OscillationDocument94 pagesChapter 9 OscillationBharat PNo ratings yet
- Key - 2544427 - 2023-11-28 08 - 20 - 33 +0000Document27 pagesKey - 2544427 - 2023-11-28 08 - 20 - 33 +0000Sarthak BaliyanNo ratings yet
- Solid State Physics by Kettel Chapter 4Document17 pagesSolid State Physics by Kettel Chapter 4Taseer BalochNo ratings yet
- Chapter 1 RotationDocument9 pagesChapter 1 RotationeltytanNo ratings yet
- Chapter 15Document22 pagesChapter 15Rynardt VogelNo ratings yet
- Electrodynamics, Chap07 PDFDocument53 pagesElectrodynamics, Chap07 PDFjoshua7312No ratings yet
- Tugas Getaran 1Document14 pagesTugas Getaran 1subardianto siputNo ratings yet
- Statistical Mechanics, Partition Function, Phase Transitions, Secondary Structure FormationDocument47 pagesStatistical Mechanics, Partition Function, Phase Transitions, Secondary Structure FormationTan Jia En FeliciaNo ratings yet
- Topic 1Document17 pagesTopic 1Aikol ErjigitovaNo ratings yet
- 2final Design LabDocument60 pages2final Design LabAnnappa ShetNo ratings yet
- Chapter3 1 OscillationDocument32 pagesChapter3 1 Oscillation杨俊熙(Stanley)No ratings yet
- Oscillations: Institute of Lifelong Learning, University of DelhiDocument36 pagesOscillations: Institute of Lifelong Learning, University of DelhiVenkataramanan SureshNo ratings yet
- Modern Physics: (ECEG 2001)Document45 pagesModern Physics: (ECEG 2001)Tilahun TesfayeNo ratings yet
- Spectroscopy 03 Vibrational 23 24 v2Document67 pagesSpectroscopy 03 Vibrational 23 24 v2ramonrubio2004No ratings yet
- EP405Jul2021 (Part 2)Document63 pagesEP405Jul2021 (Part 2)Ayush TarwayNo ratings yet
- Free VibrationDocument5 pagesFree VibrationLokesh DandgavalNo ratings yet
- 8.simple Harmonic Motion and ElasticityPROBLEM SOLVING TACTICSFormulae Sheet 2Document3 pages8.simple Harmonic Motion and ElasticityPROBLEM SOLVING TACTICSFormulae Sheet 2Gatbunton JethroeNo ratings yet
- Things To Learn Today: 1. Equivalent Spring Stiffness 2. A PendulumDocument29 pagesThings To Learn Today: 1. Equivalent Spring Stiffness 2. A PendulumSayantan GhoshNo ratings yet
- A Discussion of Oscillator Strengths and Related Issues: November 1999Document18 pagesA Discussion of Oscillator Strengths and Related Issues: November 1999danielmNo ratings yet
- Waves MechanicalDocument81 pagesWaves MechanicalChandrali DasNo ratings yet
- Single-Degree-of-Freedom (Single DOF) Linear SystemDocument14 pagesSingle-Degree-of-Freedom (Single DOF) Linear SystemWintWintKhineNo ratings yet
- 12-3 Energy in SHM (P304) : Take A Spring Oscillator As An ExampleDocument19 pages12-3 Energy in SHM (P304) : Take A Spring Oscillator As An Exampletuikbe100% (1)
- Inno2018 Emt2502 Vibrations Free Vibration SdofDocument15 pagesInno2018 Emt2502 Vibrations Free Vibration SdofinnoodiraNo ratings yet
- Oscillation by Carlo PogiDocument17 pagesOscillation by Carlo PogiCarlo MacawileNo ratings yet
- TomDocument53 pagesTomdinesh veerNo ratings yet
- Simple Harmonic MotionDocument10 pagesSimple Harmonic MotionRISETIA GAMINGNo ratings yet
- Lecture 17Document21 pagesLecture 17narvan.m31No ratings yet
- OscillationsDocument7 pagesOscillationsjayashriparida09No ratings yet
- Outline 1Document22 pagesOutline 1psallhNo ratings yet
- PH127 Lectures Nov. 2022 4Document212 pagesPH127 Lectures Nov. 2022 4dicksonjohnxpNo ratings yet
- 22.01 Fall 2016, Quiz 2 Solutions: 1 (48 Points) Short Answers, 6 Points EachDocument9 pages22.01 Fall 2016, Quiz 2 Solutions: 1 (48 Points) Short Answers, 6 Points Eachpe pNo ratings yet
- Lecturas de ElectrodinamicaDocument6 pagesLecturas de ElectrodinamicaErich Manrique CastilloNo ratings yet
- EG268EGA229EG238 Vibration Lab Sheet 2019Document6 pagesEG268EGA229EG238 Vibration Lab Sheet 2019classwizcasio12345No ratings yet
- SOM FormulaeDocument24 pagesSOM FormulaeYogesh ChillargeNo ratings yet
- A-Level PhysicsDocument21 pagesA-Level PhysicsJerry SongNo ratings yet
- DPP-1 Simple Harmonic MotionDocument7 pagesDPP-1 Simple Harmonic MotionHarika NKNo ratings yet
- Importance of VibrationDocument17 pagesImportance of VibrationBushra RiazNo ratings yet
- Free Vibration 2 DampedDocument18 pagesFree Vibration 2 DampedCynthia SimonNo ratings yet
- Simple Harmonic Motion 3Document32 pagesSimple Harmonic Motion 3Ar Ar ViNo ratings yet
- Simple Harmonic MotionDocument23 pagesSimple Harmonic MotionAdeeba JunaidiNo ratings yet
- 3.modeling of Mechanical SystemDocument17 pages3.modeling of Mechanical SystemAjay JagarlamudiNo ratings yet
- 23-Legendre¿s Linear Equation, Applications-10!09!2019 (10-Sep-2019) Material II 10-Sep-2019 Module 3Document5 pages23-Legendre¿s Linear Equation, Applications-10!09!2019 (10-Sep-2019) Material II 10-Sep-2019 Module 3Parth VijayNo ratings yet
- Basic Structural Dynamics I: Wind Loading and Structural Response - Lecture 10 Dr. J.D. HolmesDocument13 pagesBasic Structural Dynamics I: Wind Loading and Structural Response - Lecture 10 Dr. J.D. Holmesganesh_withucadNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Chapter 1 - Problems 17,20Document2 pagesChapter 1 - Problems 17,20Bai ChengNo ratings yet
- Résumé BiblioDocument10 pagesRésumé Bibliolouis gauvainNo ratings yet
- Babinsky 2003Document8 pagesBabinsky 2003Sangeet SOURAV SUNDERROYNo ratings yet
- TRANSPORT PHENOMENA - Unit 2 NotesDocument128 pagesTRANSPORT PHENOMENA - Unit 2 NotesRathi ManiNo ratings yet
- Investigations On Missile Configuration Aerodynamic Characteristics For Design OptimizationDocument10 pagesInvestigations On Missile Configuration Aerodynamic Characteristics For Design OptimizationTadzi G StowersNo ratings yet
- 2020 Sec 3 Physics Term 2 WA 2Document11 pages2020 Sec 3 Physics Term 2 WA 2VinidraNo ratings yet
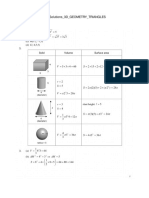
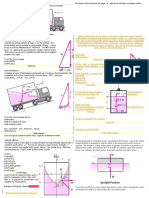
- Solutions 3D GEOMETRY TRIANGLESDocument15 pagesSolutions 3D GEOMETRY TRIANGLESAna Clara Maria Ramirez FleumerNo ratings yet
- Current PulsationDocument12 pagesCurrent Pulsationtopazamp123No ratings yet
- Assignment 6Document5 pagesAssignment 6Kalpit AgarwalNo ratings yet
- Fluent Moving FramesDocument86 pagesFluent Moving FramesTiago CandeiasNo ratings yet
- Graph Trig FunctionsDocument2 pagesGraph Trig FunctionsJohn Kevin GeronimoNo ratings yet
- 2.NCERT Exemplar Class 8 Science Solutions Chapter 13 SoundDocument10 pages2.NCERT Exemplar Class 8 Science Solutions Chapter 13 Soundmishraishita0510No ratings yet
- Physics Grade 10 Physics Ch7 Geometrical OpticsDocument62 pagesPhysics Grade 10 Physics Ch7 Geometrical Opticsapi-19999615No ratings yet
- Critical Book Review FisikaDocument12 pagesCritical Book Review FisikaveronikaNo ratings yet
- 106 AngularMomentum ENGDocument14 pages106 AngularMomentum ENGKristy LeeNo ratings yet
- dydx=tanθ dydx=ω2xg dy=ω2gx dx y=ω2x22g: Other FormulasDocument2 pagesdydx=tanθ dydx=ω2xg dy=ω2gx dx y=ω2x22g: Other Formulasangelica brongcanoNo ratings yet
- Flight Control SurfacesDocument28 pagesFlight Control Surfacesjan paul de leonNo ratings yet
- Prblem Set 4 2S AY 2018-2019Document3 pagesPrblem Set 4 2S AY 2018-2019Allein Loisse EspinozaNo ratings yet
- PreviewDocument24 pagesPreviewmadhankumargNo ratings yet
- Welcome To Interactive Physics: Step Related Physics ConceptsDocument4 pagesWelcome To Interactive Physics: Step Related Physics Conceptsphu1001No ratings yet
- Graphical Analysis of Motion WorksheetDocument2 pagesGraphical Analysis of Motion WorksheetAnnNo ratings yet
- Dynamics of MachineryDocument8 pagesDynamics of MachineryNORIMAR24No ratings yet
- Aerodynamic Design and Analysis of A Reusable Launch VehicleDocument8 pagesAerodynamic Design and Analysis of A Reusable Launch VehicleAppu KuttyNo ratings yet
- Gcse Physics Coursework HelicoptersDocument4 pagesGcse Physics Coursework Helicoptersafjwofermaavkm100% (2)
- Chapter 3Document32 pagesChapter 3Anusha ManiNo ratings yet
- Physics 20 Unit C: Energy, Work and Circular MotionDocument1 pagePhysics 20 Unit C: Energy, Work and Circular MotionUnzal FatehullahNo ratings yet
- CT 3 JEE Adv 12-05-2013 Solution EnglishDocument12 pagesCT 3 JEE Adv 12-05-2013 Solution EnglishPrashantNo ratings yet
- Motion 1 MSDocument4 pagesMotion 1 MSnellyistantiNo ratings yet
- Unit 3 Quiz Solutions (100 Points)Document5 pagesUnit 3 Quiz Solutions (100 Points)Ray WongNo ratings yet