Download as pdf or txt
You might also like
- Systems Thinking BookDocument42 pagesSystems Thinking BookArturo Andres100% (4)
- Physics Lab 1Document16 pagesPhysics Lab 1Bassel RezkallaNo ratings yet
- Roundness ExperimentDocument8 pagesRoundness ExperimentLanceal TanNo ratings yet
- Experiment - I Measurement: Physics For Scientists and EngineersDocument10 pagesExperiment - I Measurement: Physics For Scientists and EngineersLionel AlrasheedNo ratings yet
- LTE Implementation Uing Xilinx FPGADocument294 pagesLTE Implementation Uing Xilinx FPGAPardhasaradhi Damarla100% (1)
- LAB ContentDocument24 pagesLAB Contenttrantienson2707No ratings yet
- Physics Labwork: For MechanicsDocument24 pagesPhysics Labwork: For MechanicsSang NguyễnNo ratings yet
- Võ Khôi Thành Sơn - 20202768Document53 pagesVõ Khôi Thành Sơn - 20202768Sơn VõNo ratings yet
- Manual PHY-103 Laboratory Final IISERDocument72 pagesManual PHY-103 Laboratory Final IISERGourav DasNo ratings yet
- 11 Class Physics Lab NotesDocument16 pages11 Class Physics Lab NotesKanika SivakumarNo ratings yet
- Physics - Practical Record Writing - Class XIDocument83 pagesPhysics - Practical Record Writing - Class XISara Wolf100% (1)
- Experiment (2) MeasurementsDocument10 pagesExperiment (2) MeasurementsAbha NawafNo ratings yet
- Physics Manual XIDocument23 pagesPhysics Manual XIAnonymous ExAwm00UPNo ratings yet
- Metrology: Nri Institute of TechnologyDocument55 pagesMetrology: Nri Institute of TechnologyKasijanto JantoNo ratings yet
- 21 Me 435,435,435,435Document40 pages21 Me 435,435,435,435Faisal MehrbanNo ratings yet
- Physics Lab Manual Diploma PDFDocument39 pagesPhysics Lab Manual Diploma PDFSriNo ratings yet
- Practical Experiments 1 To 7Document9 pagesPractical Experiments 1 To 7Moses Samuel SukdularyNo ratings yet
- Course 1 Laboratory: Second Semester Experiment: The Shear Modulus of SteelDocument7 pagesCourse 1 Laboratory: Second Semester Experiment: The Shear Modulus of SteelFaiq AhmadNo ratings yet
- ME2308 Lab ManualDocument28 pagesME2308 Lab Manualvenkateshyadav2116No ratings yet
- Metrology: Nri Institute of TechnologyDocument55 pagesMetrology: Nri Institute of TechnologySavantNo ratings yet
- Exp.2 Screw GaugeDocument7 pagesExp.2 Screw GaugeSHAIK ISMAIL BASHANo ratings yet
- Errors, Data Analysis and Fine Measurements: Experiment Number 1Document7 pagesErrors, Data Analysis and Fine Measurements: Experiment Number 1Mahmoud SamahinNo ratings yet
- Errors, Data Analysis and Fine Measurements: Experiment Number 1Document7 pagesErrors, Data Analysis and Fine Measurements: Experiment Number 1Mahmoud SamahinNo ratings yet
- Metrology and Measurements Lab Manual: V Semester Mechanical Engineering Rajalakshmi Engineering CollegeDocument30 pagesMetrology and Measurements Lab Manual: V Semester Mechanical Engineering Rajalakshmi Engineering CollegeSanju JohnNo ratings yet
- IPE 382 - Lab SheetDocument26 pagesIPE 382 - Lab SheetSAnNo ratings yet
- BASIC PHYSICS G-2 Practical Manual FinalDocument27 pagesBASIC PHYSICS G-2 Practical Manual FinalPriya SharmaNo ratings yet
- Anik Sarkar - Lab Manual XI PDFDocument34 pagesAnik Sarkar - Lab Manual XI PDFKousik SarkarNo ratings yet
- AP - Lab 02 - Measurement Using Screw GuageDocument3 pagesAP - Lab 02 - Measurement Using Screw GuagesalihaNo ratings yet
- Metrology Lab ManualDocument35 pagesMetrology Lab ManualNo NameNo ratings yet
- Screw GaugeDocument19 pagesScrew GaugeMohammad Rashik ZamanNo ratings yet
- Physics - Practical Record Writing - Class XI-2024Document35 pagesPhysics - Practical Record Writing - Class XI-2024Soha TamkeenNo ratings yet
- Index: Ex. No Name of The Experiment Page No. Cycle IDocument29 pagesIndex: Ex. No Name of The Experiment Page No. Cycle Iprakashrs295No ratings yet
- Metrology-Lab-Manual 3 Year 1semDocument41 pagesMetrology-Lab-Manual 3 Year 1semBHARATH Chandra100% (1)
- Experiment 2Document3 pagesExperiment 2Shubhra Nil DeyNo ratings yet
- Physical ExperimentDocument21 pagesPhysical ExperimentAn LêNo ratings yet
- Class Xi - Practicals 2024Document24 pagesClass Xi - Practicals 2024pillisathwik2No ratings yet
- Practicals Physics 23 - 115949Document18 pagesPracticals Physics 23 - 1159497256akmalNo ratings yet
- Class - XI Physics Practical Year-2020-21Document33 pagesClass - XI Physics Practical Year-2020-21RiyaNo ratings yet
- ME2308 Lab ManualDocument28 pagesME2308 Lab ManualNishanth ShannmugamNo ratings yet
- Jannatul Kawnine Ikra - Id: 233022712: Date: 24/02/24Document8 pagesJannatul Kawnine Ikra - Id: 233022712: Date: 24/02/24nahianrahman0011No ratings yet
- Physics ExperimentDocument9 pagesPhysics ExperimentgapuzsawalNo ratings yet
- Dcep 112 & Dmep 112Document21 pagesDcep 112 & Dmep 112aneeqNo ratings yet
- Screw GaugeDocument6 pagesScrew GaugeFarhana Sabrin0% (1)
- Can You Divide A Millimeter Into 20 Equal Parts? Essentially, A Vernier Does That ExactlyDocument10 pagesCan You Divide A Millimeter Into 20 Equal Parts? Essentially, A Vernier Does That Exactlyshivsagar sharmaNo ratings yet
- Measuring InstrumentsDocument7 pagesMeasuring Instrumentslindobuhledandelion0No ratings yet
- 2micrometer Screw - Copy 2Document5 pages2micrometer Screw - Copy 2fearlessshaikh007No ratings yet
- Experimental Guidance 1.1. Measurement of Density 1st WeekDocument12 pagesExperimental Guidance 1.1. Measurement of Density 1st WeeksadmanNo ratings yet
- Determining Coefficient of Viscosity of Liquid: A Formal Physics Laboratory ReportDocument7 pagesDetermining Coefficient of Viscosity of Liquid: A Formal Physics Laboratory ReportNGUYÊN LÊ KHÁNHNo ratings yet
- Newton RingDocument4 pagesNewton RingAmit DipankarNo ratings yet
- Exp 02 Screw GaugeDocument5 pagesExp 02 Screw GaugeGaming baseNo ratings yet
- Physics Expt 0 - Vernier and Screw GaugeDocument7 pagesPhysics Expt 0 - Vernier and Screw GaugeDebayan MaitiNo ratings yet
- Class 11 ExperimentsDocument25 pagesClass 11 ExperimentsSoham Nag100% (1)
- Ex 2metrologyDocument6 pagesEx 2metrologyPiyush ChaulaNo ratings yet
- GR 11 Physics - Practical - Booklet - 2022-23Document40 pagesGR 11 Physics - Practical - Booklet - 2022-23Hunter OfficialNo ratings yet
- Practical File Class XIDocument7 pagesPractical File Class XIISHITVA JOSHINo ratings yet
- Object: Experiment 1 MeasurementDocument7 pagesObject: Experiment 1 MeasurementAnonymous PhtjQvnZzNo ratings yet
- Screw GuageDocument3 pagesScrew GuageHarini PriyaNo ratings yet
- Physics 1Document3 pagesPhysics 1simrankaur09xNo ratings yet
- Principles of Physics I (PHY111) Lab Experiment No: 1Document21 pagesPrinciples of Physics I (PHY111) Lab Experiment No: 1JU KomolNo ratings yet
- Measure and Error Analysis Lab 1Document7 pagesMeasure and Error Analysis Lab 1RexRuNo ratings yet
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Standard-Slope Integration: A New Approach to Numerical IntegrationFrom EverandStandard-Slope Integration: A New Approach to Numerical IntegrationNo ratings yet
- (2024) Mark J. DeBonis - Fundamentals of Abstract Algebra-CRC PressDocument303 pages(2024) Mark J. DeBonis - Fundamentals of Abstract Algebra-CRC PressSalman 1stINANo ratings yet
- Quiz1 - Probability of Events: IB Mathematics SLDocument1 pageQuiz1 - Probability of Events: IB Mathematics SL凛音No ratings yet
- Survey Article: Power Equations in Endurance Sports GDocument17 pagesSurvey Article: Power Equations in Endurance Sports Gnico Michou-SaucetNo ratings yet
- Ch. 1 Digital Systems - TaggedDocument28 pagesCh. 1 Digital Systems - TaggedMaram AlsohimiNo ratings yet
- Worksheet 1.2 A GraphsDocument8 pagesWorksheet 1.2 A GraphsAbel CruzNo ratings yet
- Adobe Scan 19-Mar-2024Document1 pageAdobe Scan 19-Mar-2024Daily cravingsNo ratings yet
- Introduction To Axially Loaded Compression MembersDocument21 pagesIntroduction To Axially Loaded Compression MembersBharath ReddyNo ratings yet
- Mark Scheme (Results) January 2020: Pearson Edexcel International GCE in Pure Mathematics P3 (WMA13) Paper 01Document21 pagesMark Scheme (Results) January 2020: Pearson Edexcel International GCE in Pure Mathematics P3 (WMA13) Paper 01Marwah Islam0% (2)
- RLC Resonant Circuits: Prepared By: - Zanyar AwezDocument24 pagesRLC Resonant Circuits: Prepared By: - Zanyar AwezSul SyaNo ratings yet
- 2 5224527518844848632Document3 pages2 5224527518844848632AnnNo ratings yet
- Permutations and CombinationsDocument18 pagesPermutations and CombinationsShihab Sharar KhanNo ratings yet
- Lab QNS M.techDocument2 pagesLab QNS M.techcalvin0% (1)
- General Physics 1Document9 pagesGeneral Physics 1Guenn RamosNo ratings yet
- UNIT-4B-Logic Based TestingDocument38 pagesUNIT-4B-Logic Based TestingAparna GattimiNo ratings yet
- Aspen DMC3 Builder Jump Start Guide JSGDocument33 pagesAspen DMC3 Builder Jump Start Guide JSGnazmul hasanNo ratings yet
- HazardsDocument58 pagesHazardsAshutosh Verma100% (1)
- Article Hour Yazi 24-3-2011Document2 pagesArticle Hour Yazi 24-3-2011Turkbayragi BenimcanimNo ratings yet
- IMODocument9 pagesIMOsssadangiNo ratings yet
- Test Loop ADT Machine Communication-02.08.2017Document3 pagesTest Loop ADT Machine Communication-02.08.2017Sagar PawarNo ratings yet
- Submissions S Itcs123 Bit16 Intermediate Programming Lec 2nd Sem 2022 2023 S Itcs123 Finals Summative Dlsu D College GsDocument9 pagesSubmissions S Itcs123 Bit16 Intermediate Programming Lec 2nd Sem 2022 2023 S Itcs123 Finals Summative Dlsu D College GsAdlei Jed TanNo ratings yet
- Math MCQDocument19 pagesMath MCQCamille LeiNo ratings yet
- IIR Digital Filtyttyer Structures Filter DesignDocument35 pagesIIR Digital Filtyttyer Structures Filter DesignSiddarth MadanNo ratings yet
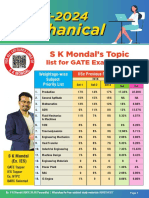
- Important Topics For GATE 2024 by S K MondalDocument19 pagesImportant Topics For GATE 2024 by S K Mondalroseri100% (1)
- Astro160 Problems Solutions Philipsquestion2.4pg40Document66 pagesAstro160 Problems Solutions Philipsquestion2.4pg40Bobert100% (2)
- Monthly358 363 RenaultDocument6 pagesMonthly358 363 RenaultTanmoy Pal ChowdhuryNo ratings yet
- Unit 1 ExercisesDocument4 pagesUnit 1 Exercises张书No ratings yet
- 8 BT It 2021Document102 pages8 BT It 2021BHARATH YOUVARAZNo ratings yet
- Easa PT66 Mod 1Document121 pagesEasa PT66 Mod 1Vik PatelNo ratings yet