Download as pdf or txt
You might also like
- Navier-Stokes Derivation in Cylindrical CoordinatesDocument11 pagesNavier-Stokes Derivation in Cylindrical Coordinatespraxie90% (62)
- UK Portal Frame CalculationDocument57 pagesUK Portal Frame CalculationKhairul JaggerNo ratings yet
- Lecture 18Document11 pagesLecture 18Mohd NaimuddinNo ratings yet
- Chapter 5Document4 pagesChapter 5Amer Ben KhalifaNo ratings yet
- Polar Coordinates: Axi-Symmetric ProblemsDocument8 pagesPolar Coordinates: Axi-Symmetric ProblemsalshaijiNo ratings yet
- Discretisation: Use of Symmetry: - TypesDocument6 pagesDiscretisation: Use of Symmetry: - TypesShamar JamesNo ratings yet
- Lecture 11: Strain Part 2: GEOS 655 Tectonic Geodesy Jeff FreymuellerDocument42 pagesLecture 11: Strain Part 2: GEOS 655 Tectonic Geodesy Jeff FreymuellerThiruPathsNo ratings yet
- Lec 6Document5 pagesLec 6stathiss11No ratings yet
- Orthogonal Curvilinear CoordinatesDocument16 pagesOrthogonal Curvilinear CoordinatesRoy VeseyNo ratings yet
- Summary of Tensors and FieldsDocument6 pagesSummary of Tensors and FieldsDaljit SinghNo ratings yet
- Orthogonal Curvilinear CoordinatesDocument16 pagesOrthogonal Curvilinear CoordinatesstriaukasNo ratings yet
- Stru Unstru Grid Generation PDFDocument100 pagesStru Unstru Grid Generation PDFVignesh DuraiNo ratings yet
- SLP Presentation 1Document12 pagesSLP Presentation 1Jone jackNo ratings yet
- Pete 455 08 StabilityDocument77 pagesPete 455 08 StabilityStanley OkaforNo ratings yet
- Axi PDFDocument8 pagesAxi PDFkt rajaNo ratings yet
- Chapter 1: Fundamentals of Field Theory - Coordinates & VectorsDocument8 pagesChapter 1: Fundamentals of Field Theory - Coordinates & VectorsBronwynRempelNo ratings yet
- Shankar ErrataDocument3 pagesShankar ErrataJuan CapellaNo ratings yet
- Lecture 8B (Coordinate Transformation Part2)Document31 pagesLecture 8B (Coordinate Transformation Part2)Bill Dominique BuljatinNo ratings yet
- On Singular Points in Story Arcs: or "I Can't Answer Your Question, But I Sure Am Glad I'm Not On That Plane!"Document4 pagesOn Singular Points in Story Arcs: or "I Can't Answer Your Question, But I Sure Am Glad I'm Not On That Plane!"jasomillNo ratings yet
- Physics430 Lecture23Document17 pagesPhysics430 Lecture23Kenn SenadosNo ratings yet
- CE 151 Chapter 6 Lecture NotesDocument39 pagesCE 151 Chapter 6 Lecture NotesNAJEB PENDIAMANNo ratings yet
- Chap 4 One Port NTK SynthesisDocument52 pagesChap 4 One Port NTK Synthesisdawitdabale09No ratings yet
- L9: Elasticity in Polar CoordinatesDocument18 pagesL9: Elasticity in Polar CoordinatesWahaj AslamNo ratings yet
- Centers of Gravity, Centers of Mass and CentroidsDocument45 pagesCenters of Gravity, Centers of Mass and CentroidsDuarte Júnio Motorsport EngineerNo ratings yet
- Center of Gravity Chpetr 5Document30 pagesCenter of Gravity Chpetr 5Norhafizah Bt SallehNo ratings yet
- Tutorial 14 AnswerDocument10 pagesTutorial 14 AnswerFlavus J.No ratings yet
- LecturenotesDocument59 pagesLecturenotesTyo Spider-MenkNo ratings yet
- Introductoin - Part 2 StuDocument33 pagesIntroductoin - Part 2 Stushivam ojhaNo ratings yet
- Vector CalculusDocument15 pagesVector CalculusJEYADURGANo ratings yet
- SpringsDocument5 pagesSpringsAhmad AbdNo ratings yet
- PHD Lecture11 12Document10 pagesPHD Lecture11 12Roy VeseyNo ratings yet
- Strain CylindricalDocument4 pagesStrain CylindricalebrahimpanNo ratings yet
- Multiple Integrals Ii Triple Integrals: 1P1 CalculusDocument19 pagesMultiple Integrals Ii Triple Integrals: 1P1 CalculusL Fattih Diwa ModeonNo ratings yet
- Chapter 8 Navier-Stokes EquationDocument16 pagesChapter 8 Navier-Stokes EquationSyahiran SalehNo ratings yet
- Lect. 8Document11 pagesLect. 8benNo ratings yet
- 7 Deflection PDFDocument53 pages7 Deflection PDFKaaviyan thirunyanamNo ratings yet
- Tripel Integral PDFDocument19 pagesTripel Integral PDFMohammad Faried RahmatNo ratings yet
- Mit - 1998-01 (1) Shear Stress in BeamsDocument31 pagesMit - 1998-01 (1) Shear Stress in BeamsabdullahNo ratings yet
- Curvilinear 1 PDFDocument8 pagesCurvilinear 1 PDFTushar GhoshNo ratings yet
- принстон 3 PDFDocument30 pagesпринстон 3 PDFLumpalump 300ftNo ratings yet
- Unit 4 NotesDocument36 pagesUnit 4 NotesDamotharan Sathesh KumarNo ratings yet
- Test of Mathematics For University Admission Test SpecificationDocument13 pagesTest of Mathematics For University Admission Test SpecificationtrgoodaleNo ratings yet
- Solid Elements For 3-D Problems: by S. Ziaei RadDocument22 pagesSolid Elements For 3-D Problems: by S. Ziaei RadВячеслав ЧедрикNo ratings yet
- Section 9.7/12.8: Triple Integrals in Cylindrical and Spherical CoordinatesDocument18 pagesSection 9.7/12.8: Triple Integrals in Cylindrical and Spherical CoordinatesQuantumGlowNo ratings yet
- Ps 2Document3 pagesPs 2wem qiaoNo ratings yet
- 3.1 Beams Built in BeamsDocument9 pages3.1 Beams Built in BeamsDaniel MukuhaNo ratings yet
- ME2061 - Strain GaugesDocument19 pagesME2061 - Strain GaugesJethro JeyarajNo ratings yet
- Report TemplateDocument19 pagesReport TemplateJealina Miranda SalasNo ratings yet
- FME - CH05 - Distributed Forces Centroids and Centers-Of-GravityDocument32 pagesFME - CH05 - Distributed Forces Centroids and Centers-Of-GravityBUTEX YENo ratings yet
- StrainDocument42 pagesStrainHakim FahmiNo ratings yet
- CircleDocument2 pagesCircleabdul shaggyNo ratings yet
- Trigonometry Review With The Unit Circle: All The Trig. You'll Ever Need To Know in CalculusDocument10 pagesTrigonometry Review With The Unit Circle: All The Trig. You'll Ever Need To Know in CalculussnakeasproNo ratings yet
- Triangle CongruenceDocument36 pagesTriangle CongruenceAsiel Rie RaytanaNo ratings yet
- Evaluating Integrals in Spherical Coordinates - BSS2ADocument12 pagesEvaluating Integrals in Spherical Coordinates - BSS2Anovelynbanut7No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- An UWB Capsule Endoscope Antenna Design For Biomedical CommunicationsDocument6 pagesAn UWB Capsule Endoscope Antenna Design For Biomedical CommunicationsSubhanjali MyneniNo ratings yet
- MV CONNEX Technical Data Surge Arrester Size 2 and DrawingDocument6 pagesMV CONNEX Technical Data Surge Arrester Size 2 and DrawingFelipe Mafioletti SchuartzNo ratings yet
- Superacid PresentationDocument14 pagesSuperacid PresentationTushar TanejaNo ratings yet
- Artificial Skin For Sweating Guarded Hotplates and Manikins Based On Weft Knitted FabricsDocument16 pagesArtificial Skin For Sweating Guarded Hotplates and Manikins Based On Weft Knitted FabricsAndrej DjurasicNo ratings yet
- Haptics Seminar ReportDocument38 pagesHaptics Seminar Reportmonty083No ratings yet
- Grade 8 Ratio JournalDocument45 pagesGrade 8 Ratio JournalZunairah AdnanNo ratings yet
- Lecture-2 Unit ConsistencyDocument37 pagesLecture-2 Unit ConsistencyHashir FurhanNo ratings yet
- The Beneficial Effects of Zinc On Diabetes-Induced Kidney Damage Inmurine Rodent Model of Type 1 Diabetes MellitusDocument10 pagesThe Beneficial Effects of Zinc On Diabetes-Induced Kidney Damage Inmurine Rodent Model of Type 1 Diabetes MellitusbelenNo ratings yet
- Gaskets and Their TypesDocument5 pagesGaskets and Their TypesManoj MulikNo ratings yet
- Klocke Kroemer ICG15Document11 pagesKlocke Kroemer ICG15ranim najibNo ratings yet
- Theory of Metal Cutting-Tool GeometryDocument25 pagesTheory of Metal Cutting-Tool GeometryIzi78% (9)
- Excel Vba and PivotDocument286 pagesExcel Vba and PivotSaqib sattarNo ratings yet
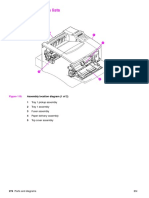
- HP 4100 Part.Document32 pagesHP 4100 Part.marecalinNo ratings yet
- Annex CHDocument22 pagesAnnex CHMario1234No ratings yet
- Brosur SHIMGEDocument38 pagesBrosur SHIMGENesto Lab IndonesiaNo ratings yet
- Dbms Lab File FormatDocument11 pagesDbms Lab File Formatshagunverma039No ratings yet
- CSCA48 2021W Unit1Document16 pagesCSCA48 2021W Unit1Shankar MutnejaNo ratings yet
- Raspberry PiDocument12 pagesRaspberry PiPaulo LaygoNo ratings yet
- CBSE NCERT Solutions For Class 11 Mathematics Chapter 01: Back of Chapter QuestionsDocument72 pagesCBSE NCERT Solutions For Class 11 Mathematics Chapter 01: Back of Chapter QuestionsMridula PriyaNo ratings yet
- Volumetric Gas in Place CalculationsDocument11 pagesVolumetric Gas in Place CalculationsDivine Oghosa BazuayeNo ratings yet
- Development of Instrumental and Sensory Analytical Methods of Food Obtained by Traditional and Emerging TechnologiesDocument163 pagesDevelopment of Instrumental and Sensory Analytical Methods of Food Obtained by Traditional and Emerging TechnologiescarloarchivioNo ratings yet
- Aes Sec 1 2022 Eoy Booklet BDocument21 pagesAes Sec 1 2022 Eoy Booklet BKrishnaNo ratings yet
- Msat-Xee-8 2 - 30 2Document2 pagesMsat-Xee-8 2 - 30 2GingubaNo ratings yet
- Reg - No.: Q.No Answer Any Two Questions Marks CO K Level 5 CO3 K3Document2 pagesReg - No.: Q.No Answer Any Two Questions Marks CO K Level 5 CO3 K3Uday Kiran UkkuNo ratings yet
- ChatGPT What Do Know About TelepathyDocument6 pagesChatGPT What Do Know About TelepathyBruce WilliamsNo ratings yet
- Process Mineralogy and Application in Mineral Processing and Extractive Metallurgy (Joe Zhou) PDFDocument13 pagesProcess Mineralogy and Application in Mineral Processing and Extractive Metallurgy (Joe Zhou) PDFAldo PabloNo ratings yet
- 03 IPv6 RoutingDocument74 pages03 IPv6 Routingguido.martiniNo ratings yet
- Concrete Constitutive RelationshipsDocument8 pagesConcrete Constitutive Relationshipsukyo0801No ratings yet
- UKC CalculationDocument2 pagesUKC CalculationIrwan Januar0% (1)