
Lecture 0 - CS50's Introduction To Artificial Intelligence With Python
Lecture 0 - CS50's Introduction To Artificial Intelligence With Python
You might also like
- Ebook Strategic Management Competitiveness and Globalization Concepts and Cases 14E PDF Full Chapter PDFDocument67 pagesEbook Strategic Management Competitiveness and Globalization Concepts and Cases 14E PDF Full Chapter PDFsamuel.chapman41697% (38)
- New Blockchain Unconfirmed Hack ScriptDocument4 pagesNew Blockchain Unconfirmed Hack ScriptDavid Lopez100% (1)
- Cambridge Secondary Checkpoint - Science (1113) PastPapers 2009-2019Document375 pagesCambridge Secondary Checkpoint - Science (1113) PastPapers 2009-2019Harini Bharani100% (8)
- John Carroll University Magazine Spring 2012Document54 pagesJohn Carroll University Magazine Spring 2012johncarrolluniversityNo ratings yet
- Introduction With Artificial IntelligenceDocument95 pagesIntroduction With Artificial Intelligencekaustubhwani155No ratings yet
- SearchDocument11 pagesSearchtoysy2020No ratings yet
- IT314 Week6aDocument30 pagesIT314 Week6aMuhammad Rahman BangashNo ratings yet
- Examples of State-Space Search AlgorithmsDocument6 pagesExamples of State-Space Search AlgorithmsAyele MitkuNo ratings yet
- Ai 2markDocument15 pagesAi 2markrcgramNo ratings yet
- FHNW Basel Bachelor ThesisDocument6 pagesFHNW Basel Bachelor Thesisdwtcn1jq100% (2)
- Input / Output Device Inference Engine Knowledge BaseDocument15 pagesInput / Output Device Inference Engine Knowledge BasePuspha Vasanth RNo ratings yet
- CS6659 & Artificial Intelligence Unit IDocument17 pagesCS6659 & Artificial Intelligence Unit IPraveena papa2712No ratings yet
- Problem Formulation & Solving by SearchDocument37 pagesProblem Formulation & Solving by SearchtauraiNo ratings yet
- Artificial Intelligence QNSDocument31 pagesArtificial Intelligence QNSMiraculous MiracleNo ratings yet
- Ai 2marks 2Document16 pagesAi 2marks 2Nirmala DuraiNo ratings yet
- CS50 Intro To AI With Python - NotesDocument11 pagesCS50 Intro To AI With Python - NotesMaria AftabNo ratings yet
- Solving Problems by SearchingDocument27 pagesSolving Problems by Searchingoromafi tubeNo ratings yet
- Artificial IntelligenceDocument28 pagesArtificial IntelligenceJoona JohnNo ratings yet
- AI Question Bank SolvedDocument16 pagesAI Question Bank SolvedSAHIL LADVANo ratings yet
- HhiolDocument39 pagesHhiolCelex VargheseNo ratings yet
- Ai Notes - 15-21Document7 pagesAi Notes - 15-21Assoc.Prof, CSE , Vel Tech, ChennaiNo ratings yet
- IntroductionDocument51 pagesIntroductionAhmed KhaledNo ratings yet
- NNAIDocument28 pagesNNAISimone SinghNo ratings yet
- Unit 2_1Document13 pagesUnit 2_1jidey30017No ratings yet
- Genetic Reinforcement Learning Algorithms For On-Line Fuzzy Inference System Tuning "Application To Mobile Robotic"Document31 pagesGenetic Reinforcement Learning Algorithms For On-Line Fuzzy Inference System Tuning "Application To Mobile Robotic"Nelson AriasNo ratings yet
- Unit II-AI-KCS071Document45 pagesUnit II-AI-KCS071Sv tuberNo ratings yet
- AI Unit 2 NotesDocument10 pagesAI Unit 2 NotesSatya NarayanaNo ratings yet
- Unit 4 (Micro) (Ai)Document6 pagesUnit 4 (Micro) (Ai)prajwalnivangune914No ratings yet
- 1 Lab + HWK 0 - Mini-Project Selection 2 Project Selection - EPFLDocument4 pages1 Lab + HWK 0 - Mini-Project Selection 2 Project Selection - EPFLKhoa NguyenNo ratings yet
- AI AssignDocument2 pagesAI AssignAnshul SoodNo ratings yet
- Ai Jisce Solutions AmanDocument45 pagesAi Jisce Solutions AmanMRINMOY BAIRAGYANo ratings yet
- Ai 2 Marks 2 These Are 2 Marks For AiDocument17 pagesAi 2 Marks 2 These Are 2 Marks For AiNithya SukumarNo ratings yet
- AI ExternalDocument23 pagesAI ExternalshrihariNo ratings yet
- Module-01 AIML 21CS54Document38 pagesModule-01 AIML 21CS54sakshiam12No ratings yet
- Breadth First Search (BFS) Depth First Search (DFS) A-Star Search (A ) Minimax Algorithm Alpha-Beta PruningDocument31 pagesBreadth First Search (BFS) Depth First Search (DFS) A-Star Search (A ) Minimax Algorithm Alpha-Beta Pruninglevecem778No ratings yet
- Chapter 3 Solving Problems by Searching1Document96 pagesChapter 3 Solving Problems by Searching1digafeeyuelNo ratings yet
- Artificial IntelligenceDocument28 pagesArtificial Intelligenceجلال عواد كاظم جودةNo ratings yet
- Intelligent Systems NotesDocument7 pagesIntelligent Systems NotesSourav DasNo ratings yet
- Moving Goal Search in Dynamic Environments: Satish Dinakar B Faculty of Science & Technology ICFAI University TripuraDocument14 pagesMoving Goal Search in Dynamic Environments: Satish Dinakar B Faculty of Science & Technology ICFAI University TripuraArnav GudduNo ratings yet
- 1-Ai AssignmentDocument19 pages1-Ai AssignmentAyele MitkuNo ratings yet
- Lab3 - Introduction To Machine Learning Algorithms With A Focus On Robotics ApplicationsDocument12 pagesLab3 - Introduction To Machine Learning Algorithms With A Focus On Robotics Applicationsnijanthan.roboticsNo ratings yet
- Ai NotesDocument13 pagesAi NotesHitesh MahiNo ratings yet
- Searching in Problem Solving AI - PPTX - 20240118 - 183824 - 0000Document57 pagesSearching in Problem Solving AI - PPTX - 20240118 - 183824 - 0000neha praveenNo ratings yet
- Chapter 3 AI ClassDocument61 pagesChapter 3 AI ClassMelkamu TsibikaNo ratings yet
- AI Prac 7 & 8Document4 pagesAI Prac 7 & 8Manish GuptaNo ratings yet
- AI Unit IDocument74 pagesAI Unit IShilpa SahuNo ratings yet
- Artificial Intelligence Unit-I Question Bank (Solved) (Theory & MCQ) TheoryDocument78 pagesArtificial Intelligence Unit-I Question Bank (Solved) (Theory & MCQ) Theoryshivam mishraNo ratings yet
- Unit 2Document48 pagesUnit 2Kishan KumarNo ratings yet
- Ai - Chapter 3Document10 pagesAi - Chapter 3sale msgNo ratings yet
- Uniform Cost Search (UCS) Algorithm in PythonDocument18 pagesUniform Cost Search (UCS) Algorithm in Pythonjiminisinbts02No ratings yet
- Unit-2 Part 1Document4 pagesUnit-2 Part 1anshul.saini0803No ratings yet
- 3 Some Actuary HaveDocument2 pages3 Some Actuary HavePurav VyasNo ratings yet
- Solving Problems by SearchingDocument67 pagesSolving Problems by SearchingDawit Shimeles TesfayeNo ratings yet
- Unit II Sub: Artificial Intelligence Prof Priya SinghDocument25 pagesUnit II Sub: Artificial Intelligence Prof Priya SinghAbcdNo ratings yet
- Solving Problems by SearchingDocument58 pagesSolving Problems by SearchingjustadityabistNo ratings yet
- Lecture2 UninformedsearchDocument70 pagesLecture2 UninformedsearchthuctranduynguyenNo ratings yet
- Unit4 KnowledgeDocument67 pagesUnit4 KnowledgeCO2061- Suyash ShishupalNo ratings yet
- Machine Learning For DummiesDocument32 pagesMachine Learning For DummiesScribdTranslationsNo ratings yet
- Experiment No. 9 TE SL-II (ANN)Document2 pagesExperiment No. 9 TE SL-II (ANN)RutujaNo ratings yet
- Sensors: Sorting Objects From A Conveyor Belt Using Pomdps With Multiple-Object Observations and Information-Gain RewardsDocument19 pagesSensors: Sorting Objects From A Conveyor Belt Using Pomdps With Multiple-Object Observations and Information-Gain RewardsSalome ChivimaNo ratings yet
- WebCamAppl WisarnDocument15 pagesWebCamAppl WisarnRafael Sánchez VillaltaNo ratings yet
- GeoprocessingDocument6 pagesGeoprocessingYusfaryan DisaputraNo ratings yet
- Solving Problems by SearchingDocument78 pagesSolving Problems by SearchingTariq IqbalNo ratings yet
- Paper Format ResearchDocument55 pagesPaper Format ResearchJezryl PelayoNo ratings yet
- Route Determination Sap SDDocument11 pagesRoute Determination Sap SDAshish SarkarNo ratings yet
- Factors Influencing The Retention of Academic Staff in A Ghanaian Technical UniversityDocument14 pagesFactors Influencing The Retention of Academic Staff in A Ghanaian Technical UniversityRanjana BandaraNo ratings yet
- Design of A Dumping GrateDocument13 pagesDesign of A Dumping GrateABDULLAH MAQBOOL100% (1)
- MKT Marunda Center ProfileDocument47 pagesMKT Marunda Center ProfileMuhammad AbidinNo ratings yet
- R9 Regular Without Late Fee PDFDocument585 pagesR9 Regular Without Late Fee PDFNithin NiceNo ratings yet
- UNIT 1 - Sequence 1.mdiDocument7 pagesUNIT 1 - Sequence 1.mdi,arcisNo ratings yet
- Self-Efficacy Mediated Spiritual Leadership On Citizenship Behavior Towards The Environment of Employees at Harapan Keluarga HospitalDocument7 pagesSelf-Efficacy Mediated Spiritual Leadership On Citizenship Behavior Towards The Environment of Employees at Harapan Keluarga HospitalInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- ASTM Rapid Sugar Test For LimeDocument5 pagesASTM Rapid Sugar Test For LimeJose PerezNo ratings yet
- UNIT I - Introduction To ManagementDocument37 pagesUNIT I - Introduction To ManagementPretentious PMRNo ratings yet
- The Paper Airplane GameDocument5 pagesThe Paper Airplane GamegoonygoogooNo ratings yet
- MBA II BRM Trimester End ExamDocument3 pagesMBA II BRM Trimester End ExamRadha Mahat0% (1)
- Feature: SFP Optical Module 1 .25G Double Optical Fiber 20kmDocument2 pagesFeature: SFP Optical Module 1 .25G Double Optical Fiber 20kmDaniel Eduardo RodriguezNo ratings yet
- Kingair 350i Wiring - 21 Air ConditionedDocument68 pagesKingair 350i Wiring - 21 Air ConditionedLaboratorio01 AvionicsNo ratings yet
- Checklist 30 Ncar Part 66 Assessment FormDocument31 pagesChecklist 30 Ncar Part 66 Assessment FormpramodNo ratings yet
- U.S. Department of Transportation National Highway Traffic Safety AdministrationDocument39 pagesU.S. Department of Transportation National Highway Traffic Safety AdministrationDiego MontanezNo ratings yet
- Portfolio in My Immersion Work 2.0Document41 pagesPortfolio in My Immersion Work 2.0floreson 16No ratings yet
- Managerial Economics: Dr. Arun Kumar Dr. Arun Kumar Assistant Professor ABV-IIITM, GwaliorDocument11 pagesManagerial Economics: Dr. Arun Kumar Dr. Arun Kumar Assistant Professor ABV-IIITM, GwaliorAbhishek SinghNo ratings yet
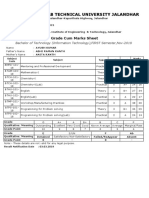
- I.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetDocument1 pageI.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetAyush KumarNo ratings yet
- BYJUS Monthly Magazine June 2021Document157 pagesBYJUS Monthly Magazine June 2021GAGANA PNo ratings yet
- Chigozie PDFDocument73 pagesChigozie PDFJackson KasakuNo ratings yet
- IBM Power Systems Cloud Security Guide: Protect IT Infrastructure in All LayersDocument220 pagesIBM Power Systems Cloud Security Guide: Protect IT Infrastructure in All Layersbenmagha9904No ratings yet
- SG250HX User+Manual V15 20201106Document78 pagesSG250HX User+Manual V15 20201106specopbookieNo ratings yet
- 3.4 Two-Band Interpolation: Papers Motion-Tracked Binaural SoundDocument10 pages3.4 Two-Band Interpolation: Papers Motion-Tracked Binaural SoundTimos PapadopoulosNo ratings yet
- C#Document42 pagesC#Shreyansh SharmaNo ratings yet
- Chapter Two: Linear Programming: Basic ConceptsDocument42 pagesChapter Two: Linear Programming: Basic ConceptsNguyễn Bùi Gia HuyNo ratings yet

























































































Download as pdf or txt
You might also like
- Ebook Strategic Management Competitiveness and Globalization Concepts and Cases 14E PDF Full Chapter PDFDocument67 pagesEbook Strategic Management Competitiveness and Globalization Concepts and Cases 14E PDF Full Chapter PDFsamuel.chapman41697% (38)
- New Blockchain Unconfirmed Hack ScriptDocument4 pagesNew Blockchain Unconfirmed Hack ScriptDavid Lopez100% (1)
- Cambridge Secondary Checkpoint - Science (1113) PastPapers 2009-2019Document375 pagesCambridge Secondary Checkpoint - Science (1113) PastPapers 2009-2019Harini Bharani100% (8)
- John Carroll University Magazine Spring 2012Document54 pagesJohn Carroll University Magazine Spring 2012johncarrolluniversityNo ratings yet
- Introduction With Artificial IntelligenceDocument95 pagesIntroduction With Artificial Intelligencekaustubhwani155No ratings yet
- SearchDocument11 pagesSearchtoysy2020No ratings yet
- IT314 Week6aDocument30 pagesIT314 Week6aMuhammad Rahman BangashNo ratings yet
- Examples of State-Space Search AlgorithmsDocument6 pagesExamples of State-Space Search AlgorithmsAyele MitkuNo ratings yet
- Ai 2markDocument15 pagesAi 2markrcgramNo ratings yet
- FHNW Basel Bachelor ThesisDocument6 pagesFHNW Basel Bachelor Thesisdwtcn1jq100% (2)
- Input / Output Device Inference Engine Knowledge BaseDocument15 pagesInput / Output Device Inference Engine Knowledge BasePuspha Vasanth RNo ratings yet
- CS6659 & Artificial Intelligence Unit IDocument17 pagesCS6659 & Artificial Intelligence Unit IPraveena papa2712No ratings yet
- Problem Formulation & Solving by SearchDocument37 pagesProblem Formulation & Solving by SearchtauraiNo ratings yet
- Artificial Intelligence QNSDocument31 pagesArtificial Intelligence QNSMiraculous MiracleNo ratings yet
- Ai 2marks 2Document16 pagesAi 2marks 2Nirmala DuraiNo ratings yet
- CS50 Intro To AI With Python - NotesDocument11 pagesCS50 Intro To AI With Python - NotesMaria AftabNo ratings yet
- Solving Problems by SearchingDocument27 pagesSolving Problems by Searchingoromafi tubeNo ratings yet
- Artificial IntelligenceDocument28 pagesArtificial IntelligenceJoona JohnNo ratings yet
- AI Question Bank SolvedDocument16 pagesAI Question Bank SolvedSAHIL LADVANo ratings yet
- HhiolDocument39 pagesHhiolCelex VargheseNo ratings yet
- Ai Notes - 15-21Document7 pagesAi Notes - 15-21Assoc.Prof, CSE , Vel Tech, ChennaiNo ratings yet
- IntroductionDocument51 pagesIntroductionAhmed KhaledNo ratings yet
- NNAIDocument28 pagesNNAISimone SinghNo ratings yet
- Unit 2_1Document13 pagesUnit 2_1jidey30017No ratings yet
- Genetic Reinforcement Learning Algorithms For On-Line Fuzzy Inference System Tuning "Application To Mobile Robotic"Document31 pagesGenetic Reinforcement Learning Algorithms For On-Line Fuzzy Inference System Tuning "Application To Mobile Robotic"Nelson AriasNo ratings yet
- Unit II-AI-KCS071Document45 pagesUnit II-AI-KCS071Sv tuberNo ratings yet
- AI Unit 2 NotesDocument10 pagesAI Unit 2 NotesSatya NarayanaNo ratings yet
- Unit 4 (Micro) (Ai)Document6 pagesUnit 4 (Micro) (Ai)prajwalnivangune914No ratings yet
- 1 Lab + HWK 0 - Mini-Project Selection 2 Project Selection - EPFLDocument4 pages1 Lab + HWK 0 - Mini-Project Selection 2 Project Selection - EPFLKhoa NguyenNo ratings yet
- AI AssignDocument2 pagesAI AssignAnshul SoodNo ratings yet
- Ai Jisce Solutions AmanDocument45 pagesAi Jisce Solutions AmanMRINMOY BAIRAGYANo ratings yet
- Ai 2 Marks 2 These Are 2 Marks For AiDocument17 pagesAi 2 Marks 2 These Are 2 Marks For AiNithya SukumarNo ratings yet
- AI ExternalDocument23 pagesAI ExternalshrihariNo ratings yet
- Module-01 AIML 21CS54Document38 pagesModule-01 AIML 21CS54sakshiam12No ratings yet
- Breadth First Search (BFS) Depth First Search (DFS) A-Star Search (A ) Minimax Algorithm Alpha-Beta PruningDocument31 pagesBreadth First Search (BFS) Depth First Search (DFS) A-Star Search (A ) Minimax Algorithm Alpha-Beta Pruninglevecem778No ratings yet
- Chapter 3 Solving Problems by Searching1Document96 pagesChapter 3 Solving Problems by Searching1digafeeyuelNo ratings yet
- Artificial IntelligenceDocument28 pagesArtificial Intelligenceجلال عواد كاظم جودةNo ratings yet
- Intelligent Systems NotesDocument7 pagesIntelligent Systems NotesSourav DasNo ratings yet
- Moving Goal Search in Dynamic Environments: Satish Dinakar B Faculty of Science & Technology ICFAI University TripuraDocument14 pagesMoving Goal Search in Dynamic Environments: Satish Dinakar B Faculty of Science & Technology ICFAI University TripuraArnav GudduNo ratings yet
- 1-Ai AssignmentDocument19 pages1-Ai AssignmentAyele MitkuNo ratings yet
- Lab3 - Introduction To Machine Learning Algorithms With A Focus On Robotics ApplicationsDocument12 pagesLab3 - Introduction To Machine Learning Algorithms With A Focus On Robotics Applicationsnijanthan.roboticsNo ratings yet
- Ai NotesDocument13 pagesAi NotesHitesh MahiNo ratings yet
- Searching in Problem Solving AI - PPTX - 20240118 - 183824 - 0000Document57 pagesSearching in Problem Solving AI - PPTX - 20240118 - 183824 - 0000neha praveenNo ratings yet
- Chapter 3 AI ClassDocument61 pagesChapter 3 AI ClassMelkamu TsibikaNo ratings yet
- AI Prac 7 & 8Document4 pagesAI Prac 7 & 8Manish GuptaNo ratings yet
- AI Unit IDocument74 pagesAI Unit IShilpa SahuNo ratings yet
- Artificial Intelligence Unit-I Question Bank (Solved) (Theory & MCQ) TheoryDocument78 pagesArtificial Intelligence Unit-I Question Bank (Solved) (Theory & MCQ) Theoryshivam mishraNo ratings yet
- Unit 2Document48 pagesUnit 2Kishan KumarNo ratings yet
- Ai - Chapter 3Document10 pagesAi - Chapter 3sale msgNo ratings yet
- Uniform Cost Search (UCS) Algorithm in PythonDocument18 pagesUniform Cost Search (UCS) Algorithm in Pythonjiminisinbts02No ratings yet
- Unit-2 Part 1Document4 pagesUnit-2 Part 1anshul.saini0803No ratings yet
- 3 Some Actuary HaveDocument2 pages3 Some Actuary HavePurav VyasNo ratings yet
- Solving Problems by SearchingDocument67 pagesSolving Problems by SearchingDawit Shimeles TesfayeNo ratings yet
- Unit II Sub: Artificial Intelligence Prof Priya SinghDocument25 pagesUnit II Sub: Artificial Intelligence Prof Priya SinghAbcdNo ratings yet
- Solving Problems by SearchingDocument58 pagesSolving Problems by SearchingjustadityabistNo ratings yet
- Lecture2 UninformedsearchDocument70 pagesLecture2 UninformedsearchthuctranduynguyenNo ratings yet
- Unit4 KnowledgeDocument67 pagesUnit4 KnowledgeCO2061- Suyash ShishupalNo ratings yet
- Machine Learning For DummiesDocument32 pagesMachine Learning For DummiesScribdTranslationsNo ratings yet
- Experiment No. 9 TE SL-II (ANN)Document2 pagesExperiment No. 9 TE SL-II (ANN)RutujaNo ratings yet
- Sensors: Sorting Objects From A Conveyor Belt Using Pomdps With Multiple-Object Observations and Information-Gain RewardsDocument19 pagesSensors: Sorting Objects From A Conveyor Belt Using Pomdps With Multiple-Object Observations and Information-Gain RewardsSalome ChivimaNo ratings yet
- WebCamAppl WisarnDocument15 pagesWebCamAppl WisarnRafael Sánchez VillaltaNo ratings yet
- GeoprocessingDocument6 pagesGeoprocessingYusfaryan DisaputraNo ratings yet
- Solving Problems by SearchingDocument78 pagesSolving Problems by SearchingTariq IqbalNo ratings yet
- Paper Format ResearchDocument55 pagesPaper Format ResearchJezryl PelayoNo ratings yet
- Route Determination Sap SDDocument11 pagesRoute Determination Sap SDAshish SarkarNo ratings yet
- Factors Influencing The Retention of Academic Staff in A Ghanaian Technical UniversityDocument14 pagesFactors Influencing The Retention of Academic Staff in A Ghanaian Technical UniversityRanjana BandaraNo ratings yet
- Design of A Dumping GrateDocument13 pagesDesign of A Dumping GrateABDULLAH MAQBOOL100% (1)
- MKT Marunda Center ProfileDocument47 pagesMKT Marunda Center ProfileMuhammad AbidinNo ratings yet
- R9 Regular Without Late Fee PDFDocument585 pagesR9 Regular Without Late Fee PDFNithin NiceNo ratings yet
- UNIT 1 - Sequence 1.mdiDocument7 pagesUNIT 1 - Sequence 1.mdi,arcisNo ratings yet
- Self-Efficacy Mediated Spiritual Leadership On Citizenship Behavior Towards The Environment of Employees at Harapan Keluarga HospitalDocument7 pagesSelf-Efficacy Mediated Spiritual Leadership On Citizenship Behavior Towards The Environment of Employees at Harapan Keluarga HospitalInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- ASTM Rapid Sugar Test For LimeDocument5 pagesASTM Rapid Sugar Test For LimeJose PerezNo ratings yet
- UNIT I - Introduction To ManagementDocument37 pagesUNIT I - Introduction To ManagementPretentious PMRNo ratings yet
- The Paper Airplane GameDocument5 pagesThe Paper Airplane GamegoonygoogooNo ratings yet
- MBA II BRM Trimester End ExamDocument3 pagesMBA II BRM Trimester End ExamRadha Mahat0% (1)
- Feature: SFP Optical Module 1 .25G Double Optical Fiber 20kmDocument2 pagesFeature: SFP Optical Module 1 .25G Double Optical Fiber 20kmDaniel Eduardo RodriguezNo ratings yet
- Kingair 350i Wiring - 21 Air ConditionedDocument68 pagesKingair 350i Wiring - 21 Air ConditionedLaboratorio01 AvionicsNo ratings yet
- Checklist 30 Ncar Part 66 Assessment FormDocument31 pagesChecklist 30 Ncar Part 66 Assessment FormpramodNo ratings yet
- U.S. Department of Transportation National Highway Traffic Safety AdministrationDocument39 pagesU.S. Department of Transportation National Highway Traffic Safety AdministrationDiego MontanezNo ratings yet
- Portfolio in My Immersion Work 2.0Document41 pagesPortfolio in My Immersion Work 2.0floreson 16No ratings yet
- Managerial Economics: Dr. Arun Kumar Dr. Arun Kumar Assistant Professor ABV-IIITM, GwaliorDocument11 pagesManagerial Economics: Dr. Arun Kumar Dr. Arun Kumar Assistant Professor ABV-IIITM, GwaliorAbhishek SinghNo ratings yet
- I.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetDocument1 pageI.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetAyush KumarNo ratings yet
- BYJUS Monthly Magazine June 2021Document157 pagesBYJUS Monthly Magazine June 2021GAGANA PNo ratings yet
- Chigozie PDFDocument73 pagesChigozie PDFJackson KasakuNo ratings yet
- IBM Power Systems Cloud Security Guide: Protect IT Infrastructure in All LayersDocument220 pagesIBM Power Systems Cloud Security Guide: Protect IT Infrastructure in All Layersbenmagha9904No ratings yet
- SG250HX User+Manual V15 20201106Document78 pagesSG250HX User+Manual V15 20201106specopbookieNo ratings yet
- 3.4 Two-Band Interpolation: Papers Motion-Tracked Binaural SoundDocument10 pages3.4 Two-Band Interpolation: Papers Motion-Tracked Binaural SoundTimos PapadopoulosNo ratings yet
- C#Document42 pagesC#Shreyansh SharmaNo ratings yet
- Chapter Two: Linear Programming: Basic ConceptsDocument42 pagesChapter Two: Linear Programming: Basic ConceptsNguyễn Bùi Gia HuyNo ratings yet