Download as pdf or txt
You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Chapter-2: Dynamic Behavior of Electric DrivesDocument43 pagesChapter-2: Dynamic Behavior of Electric DrivesMuket AgmasNo ratings yet
- MeasurementOf SinglePhaseMotor2019Document6 pagesMeasurementOf SinglePhaseMotor2019fissahayehadgu284No ratings yet
- MeasurementOf SinglePhaseMotor2017Document6 pagesMeasurementOf SinglePhaseMotor2017KHULNA KINGS gamingNo ratings yet
- 3 - Starter, Braking, EtcDocument22 pages3 - Starter, Braking, EtcAtul Jaysing PatilNo ratings yet
- Unit 3Document13 pagesUnit 3faisal shaikNo ratings yet
- Unit 3: Control of Three Phase Induction MotorDocument52 pagesUnit 3: Control of Three Phase Induction MotorSidra BegumNo ratings yet
- R. Harish (08011A0209) B.Tech (4/4) Dept. of Electrical and Electronics Engineering, JNTUH College of Engineering HyderabadDocument17 pagesR. Harish (08011A0209) B.Tech (4/4) Dept. of Electrical and Electronics Engineering, JNTUH College of Engineering HyderabadNagi NagNo ratings yet
- Unit 4 Stator Side Control of 3 Phase Induction Motor DriveDocument16 pagesUnit 4 Stator Side Control of 3 Phase Induction Motor DriveJaya Prasanth KumarNo ratings yet
- Project Work: Induction Motor in MatlabDocument25 pagesProject Work: Induction Motor in MatlabakshayNo ratings yet
- Part II - AC MotorsDocument30 pagesPart II - AC MotorsYan Liang HaoNo ratings yet
- Dr. Ali Abdul Razzaq ALTAHIR: Lecture 6: Third ClassDocument20 pagesDr. Ali Abdul Razzaq ALTAHIR: Lecture 6: Third ClassAli Altahir100% (1)
- 3 Phase Induction Motor Speed Control Using PIC PDFDocument18 pages3 Phase Induction Motor Speed Control Using PIC PDFAmmar Al-Kindy100% (2)
- Unit 3Document20 pagesUnit 3shaik WajidNo ratings yet
- EDC Unit 5Document41 pagesEDC Unit 5Dr Harsha AnantwarNo ratings yet
- Induction Motor GK DubeyDocument13 pagesInduction Motor GK Dubeysakshamnegi40069No ratings yet
- Synchronous Motor AC DrivesDocument40 pagesSynchronous Motor AC DrivesHarshal Thakur100% (1)
- ENEL280 AC Motor Control LabDocument5 pagesENEL280 AC Motor Control LabPatrick LustyNo ratings yet
- Starting and Speed Control of 3 Phase Induction MotorDocument38 pagesStarting and Speed Control of 3 Phase Induction MotorSree ShobhaNo ratings yet
- Chapter 4 PDFDocument40 pagesChapter 4 PDFbroNo ratings yet
- Good Day!: Tanjuatco, Jahriel P. BseeDocument32 pagesGood Day!: Tanjuatco, Jahriel P. BseeTanjuatco JahrielNo ratings yet
- 8 Indution MotorDocument4 pages8 Indution MotorSandrawarman BalasundramNo ratings yet
- Lab 07 - DC MotorsDocument9 pagesLab 07 - DC MotorsChamila SumathiratnaNo ratings yet
- Answers 4,5,6Document8 pagesAnswers 4,5,6Mohsin TariqNo ratings yet
- Voltage Source Inverter (VSI) ControlDocument34 pagesVoltage Source Inverter (VSI) ControlPrem SagarNo ratings yet
- DC MACH - Chapter 5Document53 pagesDC MACH - Chapter 5marryjohnopalla05No ratings yet
- Working Principle of Soft StarterDocument8 pagesWorking Principle of Soft StartermrmummyeNo ratings yet
- Lab 09 - Synchronous MotorgDocument8 pagesLab 09 - Synchronous Motorgdev2191No ratings yet
- Synchronous MotorDocument33 pagesSynchronous Motorvnyshreyas100% (3)
- Mott Chapter 21Document29 pagesMott Chapter 21kundayi shavaNo ratings yet
- Induction Motor: Working Principle, Types, &Document6 pagesInduction Motor: Working Principle, Types, &0409piyushNo ratings yet
- Induction Motor Working Principle Types PDFDocument6 pagesInduction Motor Working Principle Types PDFdumpyNo ratings yet
- PMSM 2012Document62 pagesPMSM 2012Sreerag Kunnathu Sugathan100% (3)
- Induction Motor - Double Field Revolving Theory - Universal MotorDocument24 pagesInduction Motor - Double Field Revolving Theory - Universal MotorSree ShobhaNo ratings yet
- Exp-8 IM Scalar ControlDocument39 pagesExp-8 IM Scalar Controlm sriNo ratings yet
- Emlab 2Document21 pagesEmlab 2hafizrahimmitNo ratings yet
- Brake Load Test of Squirel Cage Induction Motor 3 PhaseDocument7 pagesBrake Load Test of Squirel Cage Induction Motor 3 Phasejassisc100% (1)
- Module 3: Induction Motor Drives: SyllabusDocument8 pagesModule 3: Induction Motor Drives: SyllabusManoj SkNo ratings yet
- Synchronous Motor DrivesDocument17 pagesSynchronous Motor DrivessidharthNo ratings yet
- Summer Training Report DLW VaranasiDocument84 pagesSummer Training Report DLW VaranasiHemant MeenaNo ratings yet
- Switched Reluctance Reluctance Motors and ControlDocument47 pagesSwitched Reluctance Reluctance Motors and ControlSreerag Kunnathu Sugathan100% (1)
- Department of Electrical and Computer EngineeringDocument35 pagesDepartment of Electrical and Computer EngineeringMarlon BoucaudNo ratings yet
- AIM: Comparative Study of Different Types of Starters Used For Three-Phase Induction MotorDocument8 pagesAIM: Comparative Study of Different Types of Starters Used For Three-Phase Induction MotorRD GamingNo ratings yet
- 7 Single Phase IMDocument45 pages7 Single Phase IMlupillorivera9981No ratings yet
- Unit 2 Single Phase Induction Motor - Watermark PDFDocument21 pagesUnit 2 Single Phase Induction Motor - Watermark PDFPalak Jio100% (1)
- Synchronous MotorDocument26 pagesSynchronous MotorSyed Muhammad Munavvar HussainNo ratings yet
- PROJCTDocument32 pagesPROJCTSwati Agarwal100% (1)
- Torque Speed CurveDocument4 pagesTorque Speed CurvehozipekNo ratings yet
- DriveMotorBasics01 PDFDocument11 pagesDriveMotorBasics01 PDFSundar Kumar Vasantha GovindarajuluNo ratings yet
- How Much Watts Solar Panel We Need For Our Home Electrical Appliances?Document6 pagesHow Much Watts Solar Panel We Need For Our Home Electrical Appliances?SovanNo ratings yet
- Torque Speed CurveDocument4 pagesTorque Speed CurveEfosa ImafidonNo ratings yet
- EEC Unit VDocument10 pagesEEC Unit VTushar ShindeNo ratings yet
- What Is Soft Starting?: Having ThyristorsDocument2 pagesWhat Is Soft Starting?: Having ThyristorsDanish MujibNo ratings yet
- Synchronous Machine: Both Air Gap Field and Rotor Rotate at Synchronous Speed Doubly-Excited Machine - Unique FeatureDocument24 pagesSynchronous Machine: Both Air Gap Field and Rotor Rotate at Synchronous Speed Doubly-Excited Machine - Unique FeatureAstitva PriyadarshiNo ratings yet
- Expt 6 The Cage Rotor Induction MotorDocument5 pagesExpt 6 The Cage Rotor Induction MotorRyan De GuzmanNo ratings yet
- Boat Maintenance Companions: Electrics & Diesel Companions at SeaFrom EverandBoat Maintenance Companions: Electrics & Diesel Companions at SeaNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Ignition, Timing And Valve Setting: A Comprehensive Illustrated Manual of Self-Instruction for Automobile Owners, Operators, Repairmen, and All Interested in Motoring.From EverandIgnition, Timing And Valve Setting: A Comprehensive Illustrated Manual of Self-Instruction for Automobile Owners, Operators, Repairmen, and All Interested in Motoring.Rating: 3 out of 5 stars3/5 (4)
- Defeo Q4 ME150-2Document12 pagesDefeo Q4 ME150-2Andrei John EnriquezNo ratings yet
- Lab 1Document2 pagesLab 1Andrei John EnriquezNo ratings yet
- Front PageDocument1 pageFront PageAndrei John EnriquezNo ratings yet
- Solved Problems DC Generators SDocument5 pagesSolved Problems DC Generators SAndrei John EnriquezNo ratings yet
- M1 CO1 (1) Construction of DC MachineDocument17 pagesM1 CO1 (1) Construction of DC MachineAndrei John EnriquezNo ratings yet
- M2 CO2 (4) DC Motor CharacteristicsDocument8 pagesM2 CO2 (4) DC Motor CharacteristicsAndrei John EnriquezNo ratings yet
- Module 2 - Summative Test in Writing - A Product ReviewDocument4 pagesModule 2 - Summative Test in Writing - A Product ReviewAndrei John EnriquezNo ratings yet
- M1 CO1 (3) DC Generator Types (Part 1) Sir GeorgeDocument5 pagesM1 CO1 (3) DC Generator Types (Part 1) Sir GeorgeAndrei John EnriquezNo ratings yet
- Math142 CheatsheetDocument4 pagesMath142 CheatsheetAndrei John EnriquezNo ratings yet
- Math 143Document36 pagesMath 143Andrei John EnriquezNo ratings yet
- PublicationDocument5 pagesPublicationAndrei John EnriquezNo ratings yet
- DocumentDocument1 pageDocumentAndrei John EnriquezNo ratings yet
- Front PageDocument1 pageFront PageAndrei John EnriquezNo ratings yet
- Adrian IDRCDocument1 pageAdrian IDRCAndrei John EnriquezNo ratings yet
- Group Rating Form GROUP6Document2 pagesGroup Rating Form GROUP6Andrei John EnriquezNo ratings yet
- Philips PL - 2016 PDFDocument52 pagesPhilips PL - 2016 PDFganeshp_eeeNo ratings yet
- Philips Professional Lighting Solutions SouthAfrica 2012 PDFDocument89 pagesPhilips Professional Lighting Solutions SouthAfrica 2012 PDFMilica LolićNo ratings yet
- 7.5 Summary: Section 7.6 Practice Set 209Document3 pages7.5 Summary: Section 7.6 Practice Set 209HUY NGUYEN QUANGNo ratings yet
- Coherent Absorption in Weakly Absorbing Layers: Pirruccio, GDocument124 pagesCoherent Absorption in Weakly Absorbing Layers: Pirruccio, GMartín FigueroaNo ratings yet
- ISO 3058 enDocument12 pagesISO 3058 enRONALD ALFONSO PACHECO TORRESNo ratings yet
- BLDC MotorDocument8 pagesBLDC MotorMahlet MelesseNo ratings yet
- DROP CABLE-1 G.657A2: Cable Cross-Section and DimensionsDocument5 pagesDROP CABLE-1 G.657A2: Cable Cross-Section and DimensionsJairoARojasNo ratings yet
- Polaris CopeDocument4 pagesPolaris Copeshai4554No ratings yet
- Class Xii PhysicsDocument4 pagesClass Xii PhysicsBiswajit BeheraNo ratings yet
- Engineering Physics Optics MainDocument87 pagesEngineering Physics Optics MainHasan ZiauddinNo ratings yet
- Newton RingsDocument8 pagesNewton RingsShaifullah ShakilNo ratings yet
- Application Note For LED Modeling PDFDocument5 pagesApplication Note For LED Modeling PDFAndréNo ratings yet
- Attenuation and DispersionDocument92 pagesAttenuation and Dispersionscribd01No ratings yet
- Sources of LightDocument3 pagesSources of LightTami AbordoNo ratings yet
- Detection and Identification of Asbestos by Microscopical Dispersion StainingDocument6 pagesDetection and Identification of Asbestos by Microscopical Dispersion StainingRafael Scatolin100% (1)
- Syllabus Ee3009 Special Electrical MachinesDocument2 pagesSyllabus Ee3009 Special Electrical MachinesSuganthiNo ratings yet
- Module 12 Behavior of Light in Optical DevicesDocument21 pagesModule 12 Behavior of Light in Optical DevicesEUNICE EL DACUMOSNo ratings yet
- New Microsoft Word DocumentDocument6 pagesNew Microsoft Word DocumentraviNo ratings yet
- Notes PPT On Low Angle FadingDocument12 pagesNotes PPT On Low Angle FadingShivani RanaNo ratings yet
- Unit 8 #10 Doppler - Effect - PPTDocument13 pagesUnit 8 #10 Doppler - Effect - PPTPrasanta NaskarNo ratings yet
- Expt-3 Various Methods of Braking of 3-Ph IMDocument6 pagesExpt-3 Various Methods of Braking of 3-Ph IMAnwesha pradhan50% (2)
- Exercise Multiple Choice Questions (MCQS) : Light-Reflection and RefractionDocument28 pagesExercise Multiple Choice Questions (MCQS) : Light-Reflection and RefractionWesNo ratings yet
- Second Quarter Exam 22-23Document7 pagesSecond Quarter Exam 22-23Marife GuadalupeNo ratings yet
- IR SpectrosDocument119 pagesIR SpectrosRojan PradhanNo ratings yet
- Module 2 - Lasers and Optical Fiber With ProblemsDocument38 pagesModule 2 - Lasers and Optical Fiber With ProblemsBruce LeeNo ratings yet
- Wave Optics Introduction PDFDocument11 pagesWave Optics Introduction PDFewrNo ratings yet
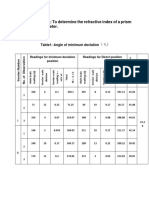
- Experiment 4 Refractive Index Data SheetDocument1 pageExperiment 4 Refractive Index Data SheetSumaiya JabineNo ratings yet
- Sigma Institute of Engineering Department of Electrical Engineering Bakrol, VadodaraDocument11 pagesSigma Institute of Engineering Department of Electrical Engineering Bakrol, VadodaraBhavik PrajapatiNo ratings yet
- Phy CH 12 Final 10thDocument36 pagesPhy CH 12 Final 10thAwan MalikNo ratings yet