Download as docx, pdf, or txt
You might also like
- Nonlinear Programming 3rd Edition Theoretical Solutions ManualDocument12 pagesNonlinear Programming 3rd Edition Theoretical Solutions ManualJigo CasteloNo ratings yet
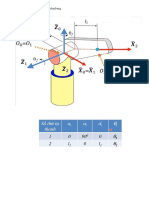
- Xây Dựng Bảng Denavit-HartenbergDocument4 pagesXây Dựng Bảng Denavit-HartenbergĐình PhúNo ratings yet
- Xây Dựng Bảng Denavit-HartenbergDocument4 pagesXây Dựng Bảng Denavit-HartenbergĐình PhúNo ratings yet
- Vibrations BFF3103: Faculty of Manufacturing EngineeringDocument10 pagesVibrations BFF3103: Faculty of Manufacturing EngineeringShatis kumarNo ratings yet
- 1 Problem 1: QJ J J J JDocument8 pages1 Problem 1: QJ J J J Janushka MukherjeeNo ratings yet
- 2.2 The Michelson-Morley Experiment 1Document7 pages2.2 The Michelson-Morley Experiment 1Yuvraj KiskuNo ratings yet
- Ejercicio AnalogicosDocument4 pagesEjercicio AnalogicosMAIDY JULIETH SANCHEZ CUELLARNo ratings yet
- Solution Ej 4 EDODocument7 pagesSolution Ej 4 EDOFaraday GarcíaNo ratings yet
- Laplace UltimoDocument1 pageLaplace UltimoDaniel RamosNo ratings yet
- L L (Sen L Sen L CosDocument1 pageL L (Sen L Sen L CosDaniel RamosNo ratings yet
- Laplace UltimoDocument1 pageLaplace UltimoDaniel RamosNo ratings yet
- AppuntiDocument34 pagesAppuntimarcoNo ratings yet
- Contoh Soal Silinder Arah 2Document5 pagesContoh Soal Silinder Arah 2ivanfauNo ratings yet
- Exercice 2Document1 pageExercice 2LEIS DJIFACKNo ratings yet
- E-1 E-2 E-3 E-4 E-5 E-6 E-7: M KG M M S N MDocument8 pagesE-1 E-2 E-3 E-4 E-5 E-6 E-7: M KG M M S N MNeiser Sayaverde RequejoNo ratings yet
- System and Control of Multiple Classic SystemsDocument17 pagesSystem and Control of Multiple Classic SystemsmaartenfdebruijneNo ratings yet
- 1 2 Relativistic Kinematics: 2.1 Particle DecayDocument18 pages1 2 Relativistic Kinematics: 2.1 Particle DecaySuman DuttaNo ratings yet
- Homework 13 - SolutionDocument4 pagesHomework 13 - SolutionPham JohnNo ratings yet
- Homework 2Document3 pagesHomework 2euler96No ratings yet
- Chapter 5 PDFDocument9 pagesChapter 5 PDF김채현No ratings yet
- Faculty Etsu EduDocument7 pagesFaculty Etsu EduFidelis MathiasNo ratings yet
- Complete Solution of Half Course Test 2 Class XiiDocument3 pagesComplete Solution of Half Course Test 2 Class XiiAvik DasNo ratings yet
- 2017 Prelim Paper 2 Comments For Students Section A S/N SolutionDocument15 pages2017 Prelim Paper 2 Comments For Students Section A S/N SolutionDesiree TayNo ratings yet
- Physics ProjectDocument5 pagesPhysics Projectabdulrazaq bibinuNo ratings yet
- Angle Is The Angle That The String Makes With The Vertical When Released From Rest Will Affect TheDocument8 pagesAngle Is The Angle That The String Makes With The Vertical When Released From Rest Will Affect TheHidayah SakinahNo ratings yet
- P8 10Document2 pagesP8 10honestcheaterNo ratings yet
- Math p1c3Document14 pagesMath p1c3kolodoloNo ratings yet
- 2005 Paper Solutions To q1q2q3Document5 pages2005 Paper Solutions To q1q2q3Iman SatriaNo ratings yet
- Quadraticsheet Ex 5 SolutionDocument5 pagesQuadraticsheet Ex 5 SolutionManoj PatilNo ratings yet
- Foster CauerDocument14 pagesFoster CauerChaudhary Santy YaduvanshiNo ratings yet
- 9 Bullet Model Paper Saq Laq SectionsDocument12 pages9 Bullet Model Paper Saq Laq SectionsvavilalashivayadavNo ratings yet
- Metodo Numerico InformeDocument2 pagesMetodo Numerico InformeRoger EscalanteNo ratings yet
- Demo Example Problem 1 22march2021Document3 pagesDemo Example Problem 1 22march2021mozesdeheiligeNo ratings yet
- 'Enter The Sequence': ProgramDocument6 pages'Enter The Sequence': ProgramlivingstonNo ratings yet
- L B L B LLL: C C R C CDocument4 pagesL B L B LLL: C C R C Cplasma_2003No ratings yet
- Ginsberg Answers PDFDocument67 pagesGinsberg Answers PDFceci325No ratings yet
- תשעו מועד א פתרוןDocument2 pagesתשעו מועד א פתרוןאללי אסנקאוNo ratings yet
- Long Term - Cumulative Test ANSWER KEY - 20.12.2020: 2v cos 2 θ 2 7 5 7Document11 pagesLong Term - Cumulative Test ANSWER KEY - 20.12.2020: 2v cos 2 θ 2 7 5 7aditi kNo ratings yet
- 自动控制理论 第三版 答案(夏德钤 翁贻方)Document35 pages自动控制理论 第三版 答案(夏德钤 翁贻方)Wade ZhangNo ratings yet
- Parcial AzulDocument4 pagesParcial AzulManuela Beltrán LopezNo ratings yet
- Bino Solution TestDocument5 pagesBino Solution TestNISHA SINGHNo ratings yet
- LogsindsolsDocument3 pagesLogsindsolsSheriff KarmoNo ratings yet
- 17.03.24 - SR - Star Co-Sc - Jee-Adv - 2016 - P2 - Gta-1 (P2) - Key & SolDocument12 pages17.03.24 - SR - Star Co-Sc - Jee-Adv - 2016 - P2 - Gta-1 (P2) - Key & Solipsita lahiriNo ratings yet
- Goldstein Chapter 8 PDFDocument5 pagesGoldstein Chapter 8 PDFHimadri ChakrabortiNo ratings yet
- Determinant Sheet Ex 03 Solution 1674622207060Document16 pagesDeterminant Sheet Ex 03 Solution 1674622207060STUDENT ARYANo ratings yet
- Ejercicios Semana 12.Document2 pagesEjercicios Semana 12.pepe09339No ratings yet
- Twk2A Additional Operational Properties of The Laplace Transform (Section 7.4) SolutionsDocument4 pagesTwk2A Additional Operational Properties of The Laplace Transform (Section 7.4) SolutionsALLEN TANAKA MUZORERANo ratings yet
- Parcial RosadoDocument3 pagesParcial RosadoManuela Beltrán LopezNo ratings yet
- Tabela de Algumas Transformadas de LaplaceDocument1 pageTabela de Algumas Transformadas de LaplaceJulio oliveiraNo ratings yet
- Tabela Transformada Laplace PDFDocument1 pageTabela Transformada Laplace PDFJulio oliveiraNo ratings yet
- sm10 10 11Document3 pagessm10 10 11nicehsy0804No ratings yet
- Problem 2.52: (A) (1) From Eq. 2.133: F + G A + BDocument1 pageProblem 2.52: (A) (1) From Eq. 2.133: F + G A + BCherryNo ratings yet
- EM-4 Assignment 2 PrathamMittalDocument13 pagesEM-4 Assignment 2 PrathamMittalrudrabhishekjainNo ratings yet
- ENGG 3410 Tutorial 1Document3 pagesENGG 3410 Tutorial 1aliNo ratings yet
- Physics Paper - Ii (Code:) : Q 19 x 4 27a = πε 19 Qq f x 27 4 q = × π ε 19 Qq 27 4 q m ω = × π εDocument16 pagesPhysics Paper - Ii (Code:) : Q 19 x 4 27a = πε 19 Qq f x 27 4 q = × π ε 19 Qq 27 4 q m ω = × π εAkshay SinghalNo ratings yet
- Chapter 3 - Lamina Stress-StrainDocument15 pagesChapter 3 - Lamina Stress-StrainyousefNo ratings yet
- Special RealativityDocument14 pagesSpecial Realativityসায়ন চক্রবর্তীNo ratings yet
- Sec1 2Document2 pagesSec1 2TheGreatPostulioNo ratings yet
- XT2127-X - Moto g10 (Capri5000) - MB - Component LocationDocument2 pagesXT2127-X - Moto g10 (Capri5000) - MB - Component Locationfenix onNo ratings yet
- Product Weight Fittings & Pipe New.Document3,565 pagesProduct Weight Fittings & Pipe New.ravidurga607No ratings yet
- Subcompact Crossover SUVDocument71 pagesSubcompact Crossover SUVGodknows ChenzaraNo ratings yet
- Diagrama Eletrico Falcon 405Document2 pagesDiagrama Eletrico Falcon 405eduardocasarim1604No ratings yet
- Program "Sifir Di Hatiku": Panitia Matematik SK Kunak 2Document38 pagesProgram "Sifir Di Hatiku": Panitia Matematik SK Kunak 2mohd farhan imranNo ratings yet
- Tablas Mul - ColoDocument13 pagesTablas Mul - ColoPetroska ToledoNo ratings yet
- Sushma Gupta SLABDocument1 pageSushma Gupta SLABKrishna BarunNo ratings yet
- Multiplication Math Table Completed 1 enDocument1 pageMultiplication Math Table Completed 1 enAyundaily100% (1)
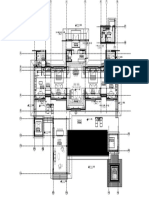
- 2 Bedroom Villa Beach Igor R25-ModelDocument1 page2 Bedroom Villa Beach Igor R25-ModelIgor Đorđević RigeNo ratings yet
- Llavero de Tablas de Multiplicar Elprofe20 GratisDocument6 pagesLlavero de Tablas de Multiplicar Elprofe20 GratisPatty LopezNo ratings yet
- Ejecutar Consulta - CRM DMSDocument28 pagesEjecutar Consulta - CRM DMScarinacasanova95No ratings yet
- Greater Erie Auto Auction - 10-25-2022 100 PMDocument21 pagesGreater Erie Auto Auction - 10-25-2022 100 PMsharon truck trailerNo ratings yet
- Guam+ - 20 - MB Component Location - Moto G9 Play - XT2083Document2 pagesGuam+ - 20 - MB Component Location - Moto G9 Play - XT2083Ysrael Agurto SejuroNo ratings yet
- #02.single Part List (Stack)Document32 pages#02.single Part List (Stack)longkhanhckNo ratings yet
- Double Swivel Shackle: Metric ThreadsDocument2 pagesDouble Swivel Shackle: Metric ThreadsDiego RodriguezNo ratings yet
- Cressida Final BrochureDocument16 pagesCressida Final BrochureAvish GangwaniNo ratings yet
- ProgramDirNAm Aug 2022Document13 pagesProgramDirNAm Aug 2022Uriel ReyesNo ratings yet
- Touareg Cr7!10!2021 El FormDocument6 pagesTouareg Cr7!10!2021 El FormfasfsfNo ratings yet
- DS213 V2.0 - SCHDocument1 pageDS213 V2.0 - SCHAndrey Voronin0% (1)
- By TypeDocument24 pagesBy TypedickytritamaNo ratings yet
- MALLORCA ANBAUWAND 89-281-..-3: Wyprodukowano Dla / Made For / Produziert FürDocument40 pagesMALLORCA ANBAUWAND 89-281-..-3: Wyprodukowano Dla / Made For / Produziert FürpalatinusmarkoNo ratings yet
- Lista 17 - Primitivas de Função de Uma VariávelDocument1 pageLista 17 - Primitivas de Função de Uma VariávelVicenzo Carlim de SousaNo ratings yet
- Menu Pokli Mee Celup Cawangan PJ 2020Document6 pagesMenu Pokli Mee Celup Cawangan PJ 2020Azrul Azam Ab AzizNo ratings yet
- Base de Datos Valores Vehiculos 2021 - 2022Document1,212 pagesBase de Datos Valores Vehiculos 2021 - 2022Ryan KellyNo ratings yet
- Chapter Wise General Math 9Document9 pagesChapter Wise General Math 9PHYSICS INNNo ratings yet
- HMI PlanoDocument1 pageHMI PlanoWilliam HernándezNo ratings yet
- GHPRJ DDF B10 Arc PLN 1002a E1Document1 pageGHPRJ DDF B10 Arc PLN 1002a E1Prabhakar DubeyNo ratings yet
- Planilha Parafusos CompletaDocument14 pagesPlanilha Parafusos CompletaHUGO CAMILONo ratings yet
- Crossover ChartsDocument38 pagesCrossover ChartssudharshananNo ratings yet
- Lamborghini Urus Outline - Google SearchDocument1 pageLamborghini Urus Outline - Google SearchKhadijaNo ratings yet