Download as pdf or txt
You might also like
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- System For 3D Mapping Using Affordable LIDAR: Veličko Krsmanović, Marko Barjaktarović, and Ana Gavrovska, Member, IEEEDocument6 pagesSystem For 3D Mapping Using Affordable LIDAR: Veličko Krsmanović, Marko Barjaktarović, and Ana Gavrovska, Member, IEEEMUSTAPHA BERAMINo ratings yet
- SENSORSDocument14 pagesSENSORSSathiya PriyaNo ratings yet
- Lee BGDocument1 pageLee BGESTRAVO, Leegerald UrciaNo ratings yet
- A Comparative Study On LIDAR and Ultrasonic Sensor For Obstacle Avoidance Robot CarDocument6 pagesA Comparative Study On LIDAR and Ultrasonic Sensor For Obstacle Avoidance Robot Carachinto tonmoyNo ratings yet
- Irjet V2i3352 PDFDocument4 pagesIrjet V2i3352 PDFPankaj RaibagkarNo ratings yet
- Review of Scanning and Pixel Array-Based LiDAR Point-CloudDocument19 pagesReview of Scanning and Pixel Array-Based LiDAR Point-Cloudweikanglai99No ratings yet
- LIDAR Based Object DetectionDocument3 pagesLIDAR Based Object DetectionSarthak BatraNo ratings yet
- LidarDocument8 pagesLidarAravind SomasundaramNo ratings yet
- What Is LiDAR and How Does It WorkDocument16 pagesWhat Is LiDAR and How Does It WorkNathanniel GonzalesNo ratings yet
- 2259-Article Text-3545-1-10-20220730Document8 pages2259-Article Text-3545-1-10-202207302022830248No ratings yet
- A Comprehensive Survey of LIDAR-based 3D Object Detection MethodsDocument29 pagesA Comprehensive Survey of LIDAR-based 3D Object Detection MethodsWilliam SantosNo ratings yet
- Lidar Technology and Its ApplicationsDocument10 pagesLidar Technology and Its Applicationsericnian453203No ratings yet
- Articulo 4Document12 pagesArticulo 4LAURA XIMENA ARISMENDY TRIANANo ratings yet
- Efficient Detection and Tracking of Human Using 3D LiDAR SensorDocument12 pagesEfficient Detection and Tracking of Human Using 3D LiDAR SensorJunaid BaberNo ratings yet
- SMART City PPT With Pilot ProjectDocument31 pagesSMART City PPT With Pilot ProjectAravind AshokNo ratings yet
- LiDAR Mapping A Remote Sensing TechnologyDocument3 pagesLiDAR Mapping A Remote Sensing Technologyvishwas sNo ratings yet
- Sensors 18 00177 v2Document14 pagesSensors 18 00177 v2Hậu PhạmNo ratings yet
- Mini Project Synopsis: Group No: T045 Group Name: AMIGOSDocument4 pagesMini Project Synopsis: Group No: T045 Group Name: AMIGOSPrince KrishnaNo ratings yet
- Presentaion 7 IoTDocument17 pagesPresentaion 7 IoTkokohgfhsfgNo ratings yet
- System Development Fa. Fbed Lasertechnik GMBH Fahrenkron 125, 22179 Hamburg, D Tel. +494064587-01, Fax - 101 Email - Ae@Ibeo - De/Vwi@Ibeo - deDocument4 pagesSystem Development Fa. Fbed Lasertechnik GMBH Fahrenkron 125, 22179 Hamburg, D Tel. +494064587-01, Fax - 101 Email - Ae@Ibeo - De/Vwi@Ibeo - deGàñêsh RëddyNo ratings yet
- Measurement, Instrumentation, Control BasicsDocument12 pagesMeasurement, Instrumentation, Control BasicserkaNo ratings yet
- LIDAR Based Object DetectionDocument4 pagesLIDAR Based Object Detectionmajekodunmijoseph2No ratings yet
- Electronics 09 00741 v3Document25 pagesElectronics 09 00741 v3Joao Ocampo AnticonaNo ratings yet
- Deep Learning For Lidar-Only and Lidar-Fusion 3D Perception: A SurveyDocument25 pagesDeep Learning For Lidar-Only and Lidar-Fusion 3D Perception: A Surveycedric.seguinNo ratings yet
- Lidar Technology (Seminar-1)Document17 pagesLidar Technology (Seminar-1)Trupti ParidaNo ratings yet
- Wang Et Al. - 2021 - Mobile LiDAR Scanning System Combined With Canopy Morphology Extracting Methods For Tree Crown ParamDocument15 pagesWang Et Al. - 2021 - Mobile LiDAR Scanning System Combined With Canopy Morphology Extracting Methods For Tree Crown Paramgopal91carpenter_515No ratings yet
- Poster Templates FinalDocument1 pagePoster Templates Finalsamarth bhardwajNo ratings yet
- Sensors: Automatic Construction of 3D Basic-Semantic Models of Inhabited Interiors Using Laser Scanners and RFID SensorsDocument21 pagesSensors: Automatic Construction of 3D Basic-Semantic Models of Inhabited Interiors Using Laser Scanners and RFID SensorsLibotNo ratings yet
- Efficiency of A LIDAR Speed Gun EFFICIENDocument5 pagesEfficiency of A LIDAR Speed Gun EFFICIENAnthony HamonNo ratings yet
- Indoor Positioning SystemDocument5 pagesIndoor Positioning SystemIJSTENo ratings yet
- LidarDocument10 pagesLidarieiman482No ratings yet
- Deep Q: Inovative Fusion TechnologyDocument17 pagesDeep Q: Inovative Fusion Technologymedof45802No ratings yet
- Lidar Exam PreparationDocument8 pagesLidar Exam Preparationsomnathmandal89100% (1)
- Technical SeminarDocument14 pagesTechnical SeminarAshwin BhatNo ratings yet
- Google Soli: 2019-20 Dept. of ECE, KLECET, ChikodiDocument14 pagesGoogle Soli: 2019-20 Dept. of ECE, KLECET, ChikodiPraveen JanamattiNo ratings yet
- Qpkmt8k0wl4ucseasa2s9d1t4.Low Latency and Low-Level Sensor Fusion For Automotive Use-CasesDocument7 pagesQpkmt8k0wl4ucseasa2s9d1t4.Low Latency and Low-Level Sensor Fusion For Automotive Use-CasesHoracio KejnNo ratings yet
- Greenhouse Environment Mapping Using A Low-Cost Lidar Via Robot Operating SystemDocument4 pagesGreenhouse Environment Mapping Using A Low-Cost Lidar Via Robot Operating SystemVänhëë ËscöbärNo ratings yet
- Laser Scanning TechnologyDocument13 pagesLaser Scanning TechnologyVirgilio F. Abundo Jr.No ratings yet
- Autonomous Vehicle Module-2 (1)Document11 pagesAutonomous Vehicle Module-2 (1)THE UNKNOWNNo ratings yet
- LIDAR Imaging SystemDocument2 pagesLIDAR Imaging SystemWolf AshNo ratings yet
- Research Review of Related LiteratureDocument9 pagesResearch Review of Related LiteratureBless beljNo ratings yet
- 2016145078김재진 최종연구논문Document7 pages2016145078김재진 최종연구논문rlawowls6634No ratings yet
- Project One PDFDocument4 pagesProject One PDFAshwini AnilNo ratings yet
- LIDAR Based Detection of Road Boundaries Using The Dens - 2021 - Robotics and AuDocument13 pagesLIDAR Based Detection of Road Boundaries Using The Dens - 2021 - Robotics and Aulihef14829No ratings yet
- Design of 3D Lidar Combined With Neural Network For Object ClassificationDocument17 pagesDesign of 3D Lidar Combined With Neural Network For Object ClassificationfatahNo ratings yet
- SEPJBOOKDocument6 pagesSEPJBOOKSaw JordanNo ratings yet
- LiDARSensor CBM September 2022 DebangshiDocument7 pagesLiDARSensor CBM September 2022 Debangshisampath nNo ratings yet
- Obstacle Detection Using A 2D LIDAR System For An Autonomous VehicleDocument5 pagesObstacle Detection Using A 2D LIDAR System For An Autonomous VehicleculiadosNo ratings yet
- Sensors 21 01951 v2Document45 pagesSensors 21 01951 v2Soumitra KunduNo ratings yet
- Advanced Technologies of Indoor Navigation For Visually ChallengedDocument10 pagesAdvanced Technologies of Indoor Navigation For Visually ChallengedSuesarn WilainuchNo ratings yet
- LIDAR TechnologyDocument9 pagesLIDAR TechnologyIJRASETPublicationsNo ratings yet
- Traffic Prediction Techniques A Review 24SABRENA MESH GARGDocument8 pagesTraffic Prediction Techniques A Review 24SABRENA MESH GARGSneha GDNo ratings yet
- Role of Iot To Avoid Spreading of Covid-19Document19 pagesRole of Iot To Avoid Spreading of Covid-19AbhishekNo ratings yet
- OIE 751 ROBOTICS Unit 3 Class 6 (28-9-2020)Document15 pagesOIE 751 ROBOTICS Unit 3 Class 6 (28-9-2020)MICHEL RAJNo ratings yet
- LidarDocument9 pagesLidarHennie VeldmanNo ratings yet
- RFID Based Human Following Load Carrier ChangedDocument9 pagesRFID Based Human Following Load Carrier ChangedmunugotisumanthraoNo ratings yet
- Anarghya MurthyDocument7 pagesAnarghya Murthysubramanya1982No ratings yet
- Radar Detection Using Ultrasonic Sensor: June 2020Document6 pagesRadar Detection Using Ultrasonic Sensor: June 2020yuqqi qiNo ratings yet
- Automatic Target Recognition: Advances in Computer Vision Techniques for Target RecognitionFrom EverandAutomatic Target Recognition: Advances in Computer Vision Techniques for Target RecognitionNo ratings yet
- SN54192Document27 pagesSN54192dhunter ZenfoneNo ratings yet
- SN5 400Document1 pageSN5 400dhunter ZenfoneNo ratings yet
- SN52020Document11 pagesSN52020dhunter ZenfoneNo ratings yet
- KEMET Part Number: SN5-40P2: General InformationDocument1 pageKEMET Part Number: SN5-40P2: General Informationdhunter ZenfoneNo ratings yet
- SN 74 HC 164Document36 pagesSN 74 HC 164dhunter ZenfoneNo ratings yet
- SN 74 Ls 05Document25 pagesSN 74 Ls 05dhunter ZenfoneNo ratings yet
- RS 385SH MabuchiDocument1 pageRS 385SH Mabuchidhunter ZenfoneNo ratings yet
- Send GSM SIM800 900 GPRS Data To Thingspeak With ArduinoDocument21 pagesSend GSM SIM800 900 GPRS Data To Thingspeak With Arduinodhunter ZenfoneNo ratings yet
- SN5474, SN54LS74A, SN54S74 SN7474. SN74LS74A, SN74S74 Dual D-Type Positive-Edge-Triggered Flip-Flops With Preset and ClearDocument7 pagesSN5474, SN54LS74A, SN54S74 SN7474. SN74LS74A, SN74S74 Dual D-Type Positive-Edge-Triggered Flip-Flops With Preset and Cleardhunter ZenfoneNo ratings yet
- Smart Link 유무선 RTU Catalog en 202210Document16 pagesSmart Link 유무선 RTU Catalog en 202210dhunter ZenfoneNo ratings yet
- Smart Link Board CatalogDocument6 pagesSmart Link Board Catalogdhunter ZenfoneNo ratings yet
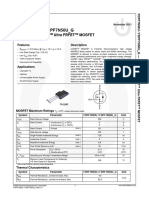
- Fdpf7n50u Fdpf7n50u GDocument8 pagesFdpf7n50u Fdpf7n50u Gdhunter ZenfoneNo ratings yet
- 2.0 VISION 2020i: 2.1 PrecautionsDocument3 pages2.0 VISION 2020i: 2.1 PrecautionsTran Van TienNo ratings yet
- Rocky Linux Focus GuideDocument24 pagesRocky Linux Focus GuideJudson BorgesNo ratings yet
- SMC LCD User Manual - Updated PDFDocument28 pagesSMC LCD User Manual - Updated PDFAnonymous lYNcMdflV9No ratings yet
- MONTHLY ASSESSMENT - I (Observation, Empathy and Define Phase) (DATE: 31 / 05 / 2020)Document8 pagesMONTHLY ASSESSMENT - I (Observation, Empathy and Define Phase) (DATE: 31 / 05 / 2020)Ankit Singh100% (1)
- 104 - System OverviewDocument27 pages104 - System OverviewMurali VarathanNo ratings yet
- AH-ML-S0 LED Solar Powered Marine LanternsDocument2 pagesAH-ML-S0 LED Solar Powered Marine Lanternspradito ala perdanaNo ratings yet
- The Knight at Dawn The Magic Tree House Wiki FANDOM Powered by WikiaDocument1 pageThe Knight at Dawn The Magic Tree House Wiki FANDOM Powered by WikiaNnn AAA0% (1)
- Catalogue of Standards of CENELECDocument18 pagesCatalogue of Standards of CENELECrhusmenNo ratings yet
- Document 1Document3 pagesDocument 1Quezon Medical Center Administrative OfficeNo ratings yet
- P25D80H PuyaDocument65 pagesP25D80H PuyaHuanNo ratings yet
- Research Methodology: Jayant Karandikar Ex. Director, Omkar Consultech, PuneDocument17 pagesResearch Methodology: Jayant Karandikar Ex. Director, Omkar Consultech, PuneJayantRKNo ratings yet
- RFID Car Parking & Canteen AutomationDocument14 pagesRFID Car Parking & Canteen Automationngugan0% (1)
- 24-Port 10/100/1000T 802.3at Poe + 4-Port Gigabit TP/SFP Combo Managed SwitchDocument9 pages24-Port 10/100/1000T 802.3at Poe + 4-Port Gigabit TP/SFP Combo Managed SwitchAzmey Azyz PratamaNo ratings yet
- Bitmain Antminer T17e 53Th - Baikal BK-DDocument5 pagesBitmain Antminer T17e 53Th - Baikal BK-DbigdataminingNo ratings yet
- Edc PDFDocument3 pagesEdc PDFChandu L YNo ratings yet
- ICT201 Learning Packet - 1st Quarter SY 2022-2023Document126 pagesICT201 Learning Packet - 1st Quarter SY 2022-2023Sam IntongNo ratings yet
- CRM 12Document6 pagesCRM 12farida2001No ratings yet
- Using The CX One Version 3 Data Trace FunctionDocument18 pagesUsing The CX One Version 3 Data Trace FunctionEd CaranayNo ratings yet
- CISSP Cheat SheetDocument3 pagesCISSP Cheat SheetAlex DcostaNo ratings yet
- The FET Constant-Current SourceLimiterDocument6 pagesThe FET Constant-Current SourceLimiterjuanete29No ratings yet
- Visatec Download System-Catalogue enDocument18 pagesVisatec Download System-Catalogue enNutfahedi Satria PramonoNo ratings yet
- Datasheet Lm35anDocument21 pagesDatasheet Lm35anDaniiel GuerreroNo ratings yet
- Employee Daily Visit Management System: Bachelor of Science (Information Technology)Document31 pagesEmployee Daily Visit Management System: Bachelor of Science (Information Technology)Sujeet ShuklaNo ratings yet
- Osmose Plan PDFDocument20 pagesOsmose Plan PDFmani317No ratings yet
- K80S-GM6 Modbus ProtocolDocument7 pagesK80S-GM6 Modbus ProtocolPutra ArisandyNo ratings yet
- ESS+Intermec+PF8T NewDocument17 pagesESS+Intermec+PF8T NewmtlpcguysNo ratings yet
- Ms Office MCQDocument20 pagesMs Office MCQash12p88No ratings yet
- Online Midterm Test (January 2022 Trimester)Document17 pagesOnline Midterm Test (January 2022 Trimester)PeiYi TanNo ratings yet
- ECQ Plots - SCIS Design Guidelines - (v0.5.0)Document22 pagesECQ Plots - SCIS Design Guidelines - (v0.5.0)causeitsoNo ratings yet
- LAB 1 REPORT-ver2Document4 pagesLAB 1 REPORT-ver2Nur HafizahNo ratings yet