Download as pdf or txt
You might also like
- 4A-FE Throttle AdjustmentsDocument7 pages4A-FE Throttle AdjustmentsHongda Zhuo100% (12)
- C1 - Introduction To Pneumatic SystemDocument46 pagesC1 - Introduction To Pneumatic SystemBazil Suhaimi100% (1)
- Kinematics in One DimensionDocument4 pagesKinematics in One DimensionAldrin VillanuevaNo ratings yet
- Revise Physics in 1days PDFDocument141 pagesRevise Physics in 1days PDFAkshat PandeyNo ratings yet
- Kinematics of A ParticleDocument37 pagesKinematics of A ParticleHush PereraNo ratings yet
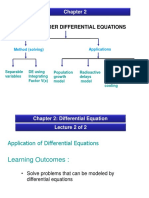
- Chapter 2Document22 pagesChapter 2Kimyona TalkNo ratings yet
- Notes Phys300Document311 pagesNotes Phys300armagandgstnNo ratings yet
- MODULE 2.aDocument13 pagesMODULE 2.aBenson MataNo ratings yet
- Critical Exponents - Chemical Reactions and Chemical Equilibrium - Thermodynamics in Other SettingsDocument16 pagesCritical Exponents - Chemical Reactions and Chemical Equilibrium - Thermodynamics in Other SettingsnokosamNo ratings yet
- ProblemSet 2Document2 pagesProblemSet 2Talking tom mastiNo ratings yet
- Classical MechanicsDocument106 pagesClassical MechanicsJoyal Jain100% (1)
- Introduction To Quantum Mechanics - Lecture3 - DQHDocument60 pagesIntroduction To Quantum Mechanics - Lecture3 - DQHViệt Hoàng NguyễnNo ratings yet
- Raw:/storage/emulated/0/Download/ES 222 MODULE 5Document29 pagesRaw:/storage/emulated/0/Download/ES 222 MODULE 5Marvin Espenocilla EspeñoNo ratings yet
- ChE Transport PhenomenaDocument139 pagesChE Transport Phenomenasubrahmanyam goriparthiNo ratings yet
- What Are Derived Quantities?: Part - ADocument8 pagesWhat Are Derived Quantities?: Part - AGirish BNo ratings yet
- Motion in 2 DimensionsDocument8 pagesMotion in 2 Dimensionsmikel artetaNo ratings yet
- Part B Lesson 4.2 Motion in One DimensionDocument9 pagesPart B Lesson 4.2 Motion in One DimensionHazen D'AuroraNo ratings yet
- Sajc h2 Physics Summary Notes (All Topics)Document43 pagesSajc h2 Physics Summary Notes (All Topics)AjathShatruRajuNo ratings yet
- Lecture 05 PDFDocument42 pagesLecture 05 PDFM Bhargava SaiNo ratings yet
- Statistical Mechanics 2014 Lecture Notes by Amit CharkrabatiDocument93 pagesStatistical Mechanics 2014 Lecture Notes by Amit CharkrabatiLâm Văn Sa HuỳnhNo ratings yet
- Complete Phy101-Note-first QuaterDocument22 pagesComplete Phy101-Note-first QuaterdxdxedddNo ratings yet
- First Integrals. Reduction. The 2-Body ProblemDocument19 pagesFirst Integrals. Reduction. The 2-Body ProblemShweta SridharNo ratings yet
- Chapter 3 - Control System ModellingDocument21 pagesChapter 3 - Control System ModellingMustafa ManapNo ratings yet
- Chapter 7, 8Document27 pagesChapter 7, 8May FadlNo ratings yet
- Fluid Mechanics QuestionsDocument12 pagesFluid Mechanics QuestionsnaiaraNo ratings yet
- Solution Methodology: FLUENT That Has Been Used in The Study. Details About The Computational ApproachDocument9 pagesSolution Methodology: FLUENT That Has Been Used in The Study. Details About The Computational ApproachSouvik BanerjeeNo ratings yet
- Unit V Quantum Mechanics PPT PH101Document11 pagesUnit V Quantum Mechanics PPT PH101Kripanshu Kumar100% (1)
- 2.1 Rectilinear MotionDocument13 pages2.1 Rectilinear MotionDaniel HaiqalNo ratings yet
- 2019 NMAT Physics LectureDocument114 pages2019 NMAT Physics Lecturekingwinter13.officialNo ratings yet
- Multi-Scale Modeling Mechanical Research Network: Fluid Sub-SectionDocument26 pagesMulti-Scale Modeling Mechanical Research Network: Fluid Sub-SectionTahmid-ur RahmanNo ratings yet
- Schrödinger Wave Equation & OperatorsDocument56 pagesSchrödinger Wave Equation & OperatorsMuhammad ZeeshanNo ratings yet
- End SEM SyllabusDocument45 pagesEnd SEM SyllabusShreyans KothariNo ratings yet
- Inbound 2904806781622511170Document26 pagesInbound 2904806781622511170keepersilent2No ratings yet
- 2-Motion Force EctDocument27 pages2-Motion Force Ectfeisya juniarNo ratings yet
- W4 Applications of First Order Differential Equations - ModuleDocument6 pagesW4 Applications of First Order Differential Equations - ModuleRaison MichNo ratings yet
- Lecture 1 Kinematics of Particle Rectilinear TranslationDocument33 pagesLecture 1 Kinematics of Particle Rectilinear TranslationKRISTINE MIRANDANo ratings yet
- EEE 3153-Control System: Lecture-On State Space Modeling & AnalysisDocument42 pagesEEE 3153-Control System: Lecture-On State Space Modeling & AnalysisShojeb ShojolNo ratings yet
- Fyp PDFDocument66 pagesFyp PDFAnupam SonarNo ratings yet
- MODULE 2 - Kinematics of Particles Rectilinear MotionDocument27 pagesMODULE 2 - Kinematics of Particles Rectilinear MotionArin ParkNo ratings yet
- Chapter 12-15Document59 pagesChapter 12-15Abdulaziz FarhanNo ratings yet
- MechanicsDocument6 pagesMechanicsHarold Lee BolingetNo ratings yet
- Lecture 1.1 Rectilinear Motion of ParticlesDocument12 pagesLecture 1.1 Rectilinear Motion of ParticlesKaezeth Jasmine AñanaNo ratings yet
- Lecture 2 Curvilinear MotionDocument87 pagesLecture 2 Curvilinear MotionDave CruzNo ratings yet
- Motion in 1DDocument14 pagesMotion in 1DadamfathialsalehNo ratings yet
- Lecture 3Document7 pagesLecture 3Rocking Himanshu21No ratings yet
- Lecture - Methods of Analysis of Basic EquationsDocument3 pagesLecture - Methods of Analysis of Basic EquationsCihan Barış ErdoğanNo ratings yet
- Physics 1 - LESSON 1 (Mid - Fall 24)Document15 pagesPhysics 1 - LESSON 1 (Mid - Fall 24)Shoaib AhmedNo ratings yet
- Disser Tai OnDocument26 pagesDisser Tai Onmandalnilay533No ratings yet
- Chapter 9 Application of DerivativesDocument27 pagesChapter 9 Application of DerivativesSong KimNo ratings yet
- Physic Lab. I Manual MMDocument33 pagesPhysic Lab. I Manual MMhzkel2312No ratings yet
- Radioactive Decay - DerivationDocument3 pagesRadioactive Decay - DerivationW-d DomNo ratings yet
- Part 1 Dynamic Modeling - 2022Document19 pagesPart 1 Dynamic Modeling - 2022MUHAMMAD LUQMAN HAKIMI MOHD ZAMRINo ratings yet
- Applied Math 154 - SummaryDocument22 pagesApplied Math 154 - Summaryrubygib1No ratings yet
- Dynamics PPT 1Document13 pagesDynamics PPT 1qurriyatus zahroNo ratings yet
- Control Lec 2 SolvedDocument16 pagesControl Lec 2 SolvedMhabad ZebariNo ratings yet
- Differential Equations ApplicationsDocument14 pagesDifferential Equations Applicationsrkpost1703No ratings yet
- Planar Kinematics of A Rigid Body (I) Impulse and Momentum: by Dr. Toh Hoong ThiamDocument34 pagesPlanar Kinematics of A Rigid Body (I) Impulse and Momentum: by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- Defenitions Physics LecDocument11 pagesDefenitions Physics Lecjennyvargas1222No ratings yet
- Unit 6Document11 pagesUnit 6suhasbnand003No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Applications of Derivatives Rate of Change (Calculus) Mathematics Question BankFrom EverandApplications of Derivatives Rate of Change (Calculus) Mathematics Question BankNo ratings yet
- Ambient Vibration 1 SlidesDocument19 pagesAmbient Vibration 1 SlidesEnrique Franco ArizaNo ratings yet
- BCPS - 43080 - 1945 - A Text Book of Physi PDFDocument1,170 pagesBCPS - 43080 - 1945 - A Text Book of Physi PDFnaushadmnnitNo ratings yet
- 2022 Filsan Cross Ref List 2022Document488 pages2022 Filsan Cross Ref List 2022Олег КравцовNo ratings yet
- NEW Atlanta HDPE 2020Document14 pagesNEW Atlanta HDPE 2020JonasNo ratings yet
- Activity No.3 (Blade Section Forces)Document16 pagesActivity No.3 (Blade Section Forces)Jandrew TanNo ratings yet
- Doosan Engine: Ratings (KWM/PS)Document4 pagesDoosan Engine: Ratings (KWM/PS)Vu DangNo ratings yet
- Factors Affecting Pavement DesignDocument6 pagesFactors Affecting Pavement Designmp SinghNo ratings yet
- Design and Testing of A 6 Inch Control Valve With A Multi-Stage Anti-Cavitation Trim PDFDocument149 pagesDesign and Testing of A 6 Inch Control Valve With A Multi-Stage Anti-Cavitation Trim PDFCarlos HilarioNo ratings yet
- Axial MemebersDocument10 pagesAxial Memeberssuzan sulimanNo ratings yet
- Outline: - Principal Stresses - Mohr's Circle in 3D - Strain Tensor - Principal StrainsDocument14 pagesOutline: - Principal Stresses - Mohr's Circle in 3D - Strain Tensor - Principal StrainsDrMohamed MansourNo ratings yet
- Models - Cfd.turbulent BackstepDocument18 pagesModels - Cfd.turbulent BackstepRouaissi RidhaNo ratings yet
- Mechanic Experi̇mentsDocument26 pagesMechanic Experi̇mentsCANGONo ratings yet
- PDE-EQP-G000-DZ-00030-0003 P000 - R03 - Edition - 0 - 3011T001Document1 pagePDE-EQP-G000-DZ-00030-0003 P000 - R03 - Edition - 0 - 3011T001Ionut FloricaNo ratings yet
- Methods To Find Slope and DeflectionDocument10 pagesMethods To Find Slope and DeflectionDhrumil PatelNo ratings yet
- ITP For PipingDocument3 pagesITP For PipingAbdullah Al Jubayer100% (1)
- Parte 4 - Como Testar o Igniter (1992-1995 2Document4 pagesParte 4 - Como Testar o Igniter (1992-1995 2Regiane Alves FerreiraNo ratings yet
- Construction Measurement III Air Conditioning Central SystemDocument131 pagesConstruction Measurement III Air Conditioning Central SystemIqram MeonNo ratings yet
- Practical Design Against Torsional Vibration Mark A. Corbo and Stanley B. Melanoski 199628032016Document30 pagesPractical Design Against Torsional Vibration Mark A. Corbo and Stanley B. Melanoski 199628032016mfhaleem@pgesco.comNo ratings yet
- Krehl 2001Document142 pagesKrehl 2001bernardo.favini6840No ratings yet
- HX140LDocument662 pagesHX140LГригорий Григорян100% (1)
- Expanding Fire Tube Boiler Tubes - Elliott ToolDocument3 pagesExpanding Fire Tube Boiler Tubes - Elliott ToolAVINASH ANAND RAONo ratings yet
- Thesis On Waffle SlabDocument177 pagesThesis On Waffle SlabNasredeenAhmadNo ratings yet
- Welding Valve Rebuild RepairDocument12 pagesWelding Valve Rebuild RepairMuthuKumarNo ratings yet
- Kinematic Analysis of McPhersonDocument7 pagesKinematic Analysis of McPhersonznamNo ratings yet
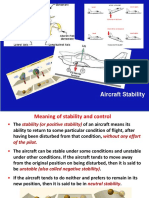
- Aircraft StabilityDocument21 pagesAircraft StabilityPrasad Chamarajanagar100% (1)
- Gen741 PushoverUserGuideDocument105 pagesGen741 PushoverUserGuideSergiovichNo ratings yet
- JW91 2011Document33 pagesJW91 2011maximchacaNo ratings yet
- Last Service ReportDocument4 pagesLast Service ReportSandeep NikhilNo ratings yet