Download as pdf or txt
You might also like
- Internal Audit Checklist IMSDocument15 pagesInternal Audit Checklist IMSGREENEXE BUSINESS CONSULTANT100% (4)
- Sensitivity Analyses of Electric Vehicle Life Cycle Impacts Based On Consumer BehaviorsDocument87 pagesSensitivity Analyses of Electric Vehicle Life Cycle Impacts Based On Consumer BehaviorsSaud PakpahanNo ratings yet
- SCE Appeal FormDocument4 pagesSCE Appeal FormSamsung tv12No ratings yet
- Pakistan Railways ProjectDocument47 pagesPakistan Railways ProjectUmairkamboh67% (3)
- 9energy Management in Sensor Networks 8o2ah51kDocument17 pages9energy Management in Sensor Networks 8o2ah51kmahboobeNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument25 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For Scientistsm shoshanNo ratings yet
- Monitoring Power Quality in Small Scale RenewableDocument13 pagesMonitoring Power Quality in Small Scale RenewableDomingo RuizNo ratings yet
- (Power Systems) Ming Zhou, Zhaoyuan Wu, Gengyin Li - Power System Flexibility - Modeling, Optimization and Mechanism Design-Springer (2023)Document279 pages(Power Systems) Ming Zhou, Zhaoyuan Wu, Gengyin Li - Power System Flexibility - Modeling, Optimization and Mechanism Design-Springer (2023)El inocenteNo ratings yet
- EnergyDocument13 pagesEnergyFernando BarónNo ratings yet
- Heussen Et Al ISGT2010 Public 4Document10 pagesHeussen Et Al ISGT2010 Public 4sebaa haddiNo ratings yet
- B21a7e87 1Document136 pagesB21a7e87 1Bogdan ZorilaNo ratings yet
- International Journal of Mechanical Sciences: Krzysztof Kecik, Andrzej MituraDocument16 pagesInternational Journal of Mechanical Sciences: Krzysztof Kecik, Andrzej MituraDhirendra Kumar PandeyNo ratings yet
- Dynamical Systems:theoritical and Experimental Analysis1Document424 pagesDynamical Systems:theoritical and Experimental Analysis1RajamaniDevaraj100% (1)
- Carga No LinealDocument47 pagesCarga No LinealKlinsman AráozNo ratings yet
- Actuators For Implantable Devices A Broad View - Actuators - For - Implantable - Devices - A - Broad - ViewDocument2 pagesActuators For Implantable Devices A Broad View - Actuators - For - Implantable - Devices - A - Broad - ViewGeneration GenerationNo ratings yet
- Attractor Networks: Fundamentals and Applications in Computational NeuroscienceFrom EverandAttractor Networks: Fundamentals and Applications in Computational NeuroscienceNo ratings yet
- Tevc ImrtDocument16 pagesTevc ImrtMauricio Moyano CastilloNo ratings yet
- Autonomous Energy Grids: February 2018Document11 pagesAutonomous Energy Grids: February 2018AnindaNo ratings yet
- Literature Review On Power GenerationDocument6 pagesLiterature Review On Power Generationc5qm9s32100% (1)
- Power Control LteDocument7 pagesPower Control LteFatmaLoussaiefNo ratings yet
- 3415 Ijasa 01Document12 pages3415 Ijasa 01Anonymous 9IlMYYx8No ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument27 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDivya SurekaNo ratings yet
- Integration of Renewable and Distributed Energy Resources in Power SystemsDocument230 pagesIntegration of Renewable and Distributed Energy Resources in Power SystemsEngEzequielNo ratings yet
- ViewDocument2 pagesViewDian LiuNo ratings yet
- Agent-Based System Applied To Smart Distribution SystemDocument22 pagesAgent-Based System Applied To Smart Distribution Systemlcm3766lNo ratings yet
- AmjadMehmoodWSNV28 Dec112014Document24 pagesAmjadMehmoodWSNV28 Dec112014Mouna elamariNo ratings yet
- Taxonomy of Honeynet Solutions: November 2015Document9 pagesTaxonomy of Honeynet Solutions: November 2015Gabriel UlloaNo ratings yet
- Advanced Materials - 2018 - Zhu - Ion Gated Synaptic Transistors Based On 2D Van Der Waals Crystals With Tunable DiffusiveDocument11 pagesAdvanced Materials - 2018 - Zhu - Ion Gated Synaptic Transistors Based On 2D Van Der Waals Crystals With Tunable Diffusive장기영No ratings yet
- POWERSUPPLYONSCMDocument7 pagesPOWERSUPPLYONSCMXI - TITL 121M. Bagas Sandika PratamaNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument23 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsJorge RestrepoNo ratings yet
- Towards Collaborative Virtual Power PlanDocument33 pagesTowards Collaborative Virtual Power PlanNedim HadžiaganovićNo ratings yet
- 分类号:TP391 密级:公开 UDC :621 学校代码:11065Document71 pages分类号:TP391 密级:公开 UDC :621 学校代码:11065ShuliNo ratings yet
- Adaptive Artificial LimbDocument11 pagesAdaptive Artificial LimbAyman KhanNo ratings yet
- Un AutreDocument26 pagesUn AutrebassbngNo ratings yet
- Limit Cycles With Chattering in Relay Feedback SysDocument14 pagesLimit Cycles With Chattering in Relay Feedback SysGeraud Russel Goune ChenguiNo ratings yet
- IJAER Ok 505-522 Aks-PkgDocument19 pagesIJAER Ok 505-522 Aks-PkgManish S PatelNo ratings yet
- An Analysis of Power Supply Design in Networking Systems On The Practices of Supply Chain ManagementDocument7 pagesAn Analysis of Power Supply Design in Networking Systems On The Practices of Supply Chain ManagementBogdan MargescuNo ratings yet
- Collaborative Duty Cycling Strategies in Energy HarvestingDocument15 pagesCollaborative Duty Cycling Strategies in Energy HarvestingTahsin Afroz Hoque NishatNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument19 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For Scientistsnauhm6838No ratings yet
- How Should Microrobots SwimDocument16 pagesHow Should Microrobots SwimHans HorstNo ratings yet
- The Reserve Sharing Mechanism Among Interconnected Power Grids Based On Block ChainDocument5 pagesThe Reserve Sharing Mechanism Among Interconnected Power Grids Based On Block ChainumairNo ratings yet
- A Brachiating Robot ControllerDocument15 pagesA Brachiating Robot Controller舒雯No ratings yet
- Power Quality Improvement Using Shunt Active Power FilterDocument5 pagesPower Quality Improvement Using Shunt Active Power FilterEditor IJTSRDNo ratings yet
- Mac 1Document245 pagesMac 1Palash ShahNo ratings yet
- Design and Analysis of Medium Voltage Distribution Network Incorporating New Loads and Embedded GenerationDocument24 pagesDesign and Analysis of Medium Voltage Distribution Network Incorporating New Loads and Embedded Generationnikkyraghu9No ratings yet
- Bio-Nanorobotics & Its Medical ApplicationsDocument10 pagesBio-Nanorobotics & Its Medical Applicationsaarumugam_rajendranNo ratings yet
- PV System Literature ReviewDocument5 pagesPV System Literature Reviewafmzhfbyasyofd100% (1)
- Upfc ThesisDocument6 pagesUpfc Thesispilav0wutyk3100% (2)
- Energy-Aware Routing Algorithms in Software-Defined Networks: June 2014Document7 pagesEnergy-Aware Routing Algorithms in Software-Defined Networks: June 2014gomathiNo ratings yet
- Energy Efficiency in Wireless Sensor Networks A ToDocument21 pagesEnergy Efficiency in Wireless Sensor Networks A ToTri WindariNo ratings yet
- The 600 MeV EUROTRANS Proton Driver LinacDocument9 pagesThe 600 MeV EUROTRANS Proton Driver LinacvladimirNo ratings yet
- Scavenging Energy From Human Activities Using PiezDocument6 pagesScavenging Energy From Human Activities Using Piezaqilah dollahNo ratings yet
- A Residential Maintenance-Free Long-Term Activity Monitoring System For Healthcare Applications - s13638-016-0534-3Document20 pagesA Residential Maintenance-Free Long-Term Activity Monitoring System For Healthcare Applications - s13638-016-0534-3Generation GenerationNo ratings yet
- Performance Enhancement of A Piezoelectric Harvester Included Into An Autonomous SystemDocument18 pagesPerformance Enhancement of A Piezoelectric Harvester Included Into An Autonomous Systemسعيد ابوسريعNo ratings yet
- PV-Benefit: A Critical Review of The Effect of Grid Integrated PV-Storage-SystemsDocument11 pagesPV-Benefit: A Critical Review of The Effect of Grid Integrated PV-Storage-SystemsJay WaltersNo ratings yet
- Modeling For Fluid Mixing in Passive Micromixers Using The Vortex IndexDocument6 pagesModeling For Fluid Mixing in Passive Micromixers Using The Vortex Indexmahe_sce4702No ratings yet
- CheapStat An Open-Source, "Do-It-Yourself" Potentiostat For Analytical and Educational ApplicationsDocument7 pagesCheapStat An Open-Source, "Do-It-Yourself" Potentiostat For Analytical and Educational ApplicationsJoão CostaNo ratings yet
- A Dynamic Load Control Scheme For Smart Grid Systems: Energy ProcediaDocument6 pagesA Dynamic Load Control Scheme For Smart Grid Systems: Energy ProcediagallantprakashNo ratings yet
- AllostasisAffectiveComputing-RLupdated4 ForsubmissionDocument21 pagesAllostasisAffectiveComputing-RLupdated4 ForsubmissionPaco AguayoNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument17 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For Scientistsᗗᔡᙢᕱ ᘻᓎᖺᕢᙢᕦᖱNo ratings yet
- Mot Inroe 12 JournalDocument35 pagesMot Inroe 12 JournalChinmaya naikNo ratings yet
- Energy Intensive Products and Services Are Penetrating People's Daily Life As Well As DifferentDocument4 pagesEnergy Intensive Products and Services Are Penetrating People's Daily Life As Well As DifferentSpk SudhinNo ratings yet
- Jamp 2020101915233010Document12 pagesJamp 2020101915233010Tua TambaNo ratings yet
- 3 Practice File: Working With WordsDocument6 pages3 Practice File: Working With WordsDeepika RokayaNo ratings yet
- Wa0003.Document23 pagesWa0003.kashifmir302No ratings yet
- BH LearnDocument3 pagesBH LearnFARDEEN AHMED 18BCY10034No ratings yet
- T8/T5, 2' X 4' Fluorescent Recessed Specification Grade TrofferDocument3 pagesT8/T5, 2' X 4' Fluorescent Recessed Specification Grade TrofferJason AbalajenNo ratings yet
- General Medical Merate S.PaDocument21 pagesGeneral Medical Merate S.PaFrancisco AvilaNo ratings yet
- Fujitsu Air Conditioner OPERATING MANUALDocument6 pagesFujitsu Air Conditioner OPERATING MANUALTavrusNo ratings yet
- Astm D6926-10Document6 pagesAstm D6926-10kinlaycheng100% (2)
- Milk Vending MachineDocument21 pagesMilk Vending MachineKunal Ahirrao50% (2)
- DAA Mid Term Assessment (Spring-2020, Semester) : Muhammad Arif Bahria University Lahore CampusDocument4 pagesDAA Mid Term Assessment (Spring-2020, Semester) : Muhammad Arif Bahria University Lahore CampusHamza Phanoti0% (1)
- Enfermedades ExantematicasDocument48 pagesEnfermedades ExantematicasRichard RosalesNo ratings yet
- Icf Vendor ManualDocument16 pagesIcf Vendor ManualVivek GoudNo ratings yet
- A Report On AutocadDocument14 pagesA Report On Autocadmanish kumar yadavNo ratings yet
- Slyp 818Document39 pagesSlyp 818ASWINNo ratings yet
- Types of Holding Company Structures - How To Structure - Subsidiary Engagement - PesyncDocument6 pagesTypes of Holding Company Structures - How To Structure - Subsidiary Engagement - Pesyncrahmad santosoNo ratings yet
- New Editable RPMS Portfolio Sy 2020 2021Document61 pagesNew Editable RPMS Portfolio Sy 2020 2021Jessica Moscardon IINo ratings yet
- Suspendido Techo Inverter LGDocument8 pagesSuspendido Techo Inverter LGJuan HincapieNo ratings yet
- Answer Saved Marked Out of 1.00Document20 pagesAnswer Saved Marked Out of 1.00Jedine SachiNo ratings yet
- Dell G5 15 5587 - Compal LA-E993P Boardview PDFDocument2 pagesDell G5 15 5587 - Compal LA-E993P Boardview PDFMaula HassanNo ratings yet
- Audio SynthesisDocument80 pagesAudio Synthesiscap2010No ratings yet
- 8-Port Antenna Frequency Range Dual Polarization HPBW Adjust. Electr. DTDocument10 pages8-Port Antenna Frequency Range Dual Polarization HPBW Adjust. Electr. DTMerab KvitsaridzeNo ratings yet
- Mechanics For Healthy Cooking Contest - NM2021 - For PaxDocument3 pagesMechanics For Healthy Cooking Contest - NM2021 - For PaxFe An CabreraNo ratings yet
- Capstone Project ReportDocument38 pagesCapstone Project ReportKEERTHANA V 20BCE1561No ratings yet
- DTV Group: Positions Job Description CertificationDocument6 pagesDTV Group: Positions Job Description CertificationhdnutzNo ratings yet
- Lab NoDocument8 pagesLab NoAli MohsinNo ratings yet
- Hotel Property Management SystemDocument12 pagesHotel Property Management SystemOlivia KateNo ratings yet
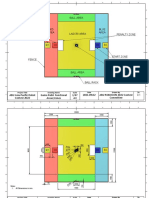
- Lagori FiguresDocument15 pagesLagori FiguresSAMPANo ratings yet
- LUCAS 3, 3 - 1 Data SheetDocument4 pagesLUCAS 3, 3 - 1 Data SheetForum PompieriiNo ratings yet