
PeterRNChilds 2014 133brakes MechanicalDesignEngin
PeterRNChilds 2014 133brakes MechanicalDesignEngin
You might also like
- Automatic Rescue Device (A.R.D.) : User Manual & Wiring Diagram (For Roped Lift)Document6 pagesAutomatic Rescue Device (A.R.D.) : User Manual & Wiring Diagram (For Roped Lift)Tadeo Benegusenga100% (3)
- F4A4x at Manual PDFDocument135 pagesF4A4x at Manual PDFDener Rogerio Dos SantosNo ratings yet
- Xpi Fuel Circuit: Fuel Manifold Self-DrainingDocument1 pageXpi Fuel Circuit: Fuel Manifold Self-DrainingAbdelkader GouddiNo ratings yet
- Mercedes E270 Cdi Wiring Diagram Trailer Recognition Control ModuleDocument3 pagesMercedes E270 Cdi Wiring Diagram Trailer Recognition Control ModuleMircea GilcaNo ratings yet
- 6-Speed MTDocument34 pages6-Speed MTJijo MercyNo ratings yet
- Livina AT PDFDocument293 pagesLivina AT PDFAndika100% (1)
- 6 HP 19Document4 pages6 HP 19JhonsonNo ratings yet
- SS20Document1 pageSS20SauliusNo ratings yet
- Booster Pump and Ejector GuideDocument8 pagesBooster Pump and Ejector Guidegmurali2kNo ratings yet
- WI-158131-Drill Pipe Dart Assembly LayoutDocument1 pageWI-158131-Drill Pipe Dart Assembly LayoutMehdi NorouziNo ratings yet
- Dell Latitute 3340 Round Rock 13.3 13229 - Rx00Document99 pagesDell Latitute 3340 Round Rock 13.3 13229 - Rx00MukhlisinNo ratings yet
- Udin-Green City PharmacyDocument1 pageUdin-Green City PharmacyKanta AgarwalNo ratings yet
- GRAFIK REPAIR 2x BOLAK BALIK M1-JAN 2023Document4 pagesGRAFIK REPAIR 2x BOLAK BALIK M1-JAN 2023Shaka ManiaNo ratings yet
- Hefei Kangshite Intelligent Technology Co., Ltd.Document28 pagesHefei Kangshite Intelligent Technology Co., Ltd.张磊No ratings yet
- Eaton: Medium Duty Piston PumpDocument20 pagesEaton: Medium Duty Piston PumpChristian StalinNo ratings yet
- 3165 Ta3169fDocument1 page3165 Ta3169fRenalyn TorioNo ratings yet
- TFF0117RF-X Yaw Adjustment Drawing 1Document1 pageTFF0117RF-X Yaw Adjustment Drawing 1Miftah KurniawanNo ratings yet
- Se Pvy Insem PapersDocument9 pagesSe Pvy Insem Paperseditingop2003No ratings yet
- Instruction Manual - NB124 - Order No 262919,262920 - 4H100-1250HS+VSDocument71 pagesInstruction Manual - NB124 - Order No 262919,262920 - 4H100-1250HS+VSOscar AlexandersonNo ratings yet
- ZF As Tronic Schematic E PDF PDF Transmission (Mechanics) VehiclesDocument1 pageZF As Tronic Schematic E PDF PDF Transmission (Mechanics) Vehiclesariswidi03No ratings yet
- Practising Project 4Document1 pagePractising Project 4sunnysidemarket00No ratings yet
- Corte BB Corte BBDocument2 pagesCorte BB Corte BBsimons79No ratings yet
- Lay Out Power HouseDocument4 pagesLay Out Power HouseFauzan BenraxidNo ratings yet
- SS10Document1 pageSS10SauliusNo ratings yet
- Q3 AnswerkeyDocument3 pagesQ3 AnswerkeyAnn NavarroNo ratings yet
- Cambridge IGCSE: PHYSICS 0625/53Document12 pagesCambridge IGCSE: PHYSICS 0625/53Ahaan DangiNo ratings yet
- Edur Vbu Series Dimensions 1Document1 pageEdur Vbu Series Dimensions 1Mohammad HosseinNo ratings yet
- DELL Latitude E3340 DLR30 13229-1 A00Document99 pagesDELL Latitude E3340 DLR30 13229-1 A00Elison Quezada100% (1)
- Part Drawing Sheet1Document1 pagePart Drawing Sheet1Shrikrushna MaliNo ratings yet
- Power Transmission 1Document3 pagesPower Transmission 1Rendi wijayaNo ratings yet
- Quanta LZ3C Rev 2a - Lenovo Ideapad z585Document51 pagesQuanta LZ3C Rev 2a - Lenovo Ideapad z585Raj kishorNo ratings yet
- Pressure Sensor With Relay Output PC250-Gi1/4A1M-ARX-B1151: Outp Ut1Document2 pagesPressure Sensor With Relay Output PC250-Gi1/4A1M-ARX-B1151: Outp Ut1CesarNo ratings yet
- A1New 5.9.24updatefireDocument8 pagesA1New 5.9.24updatefirekingacezprezNo ratings yet
- API 650 Tank Design Calculationxls Energy and CompressDocument8 pagesAPI 650 Tank Design Calculationxls Energy and CompressTech ManagerNo ratings yet
- Api 650 Tank Design Calculationxls Energy andDocument8 pagesApi 650 Tank Design Calculationxls Energy andjalil ahmedNo ratings yet
- R.004 - Cofraj Si Detalii Armare Fundatii GF - 1 - A3 297x900Document1 pageR.004 - Cofraj Si Detalii Armare Fundatii GF - 1 - A3 297x900BogdanIngNo ratings yet
- PLVRLFRW: AK-AK (1:2.5)Document1 pagePLVRLFRW: AK-AK (1:2.5)Eduardo RodriguezNo ratings yet
- Plate Pusher LH: Design Engineering SecondaryDocument1 pagePlate Pusher LH: Design Engineering Secondaryarief yuliantoNo ratings yet
- API 650 Tank Design Calculationxls Energy and CompressDocument8 pagesAPI 650 Tank Design Calculationxls Energy and Compressجيلالي نفوسيNo ratings yet
- Kompre 17 - 18 Sesi 1Document71 pagesKompre 17 - 18 Sesi 1wdafwinmNo ratings yet
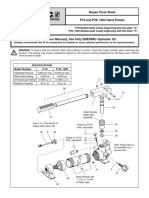
- Hydraulic Technology Worldwide: Repair Parts Sheet P18 and P39, 1003 Hand PumpsDocument2 pagesHydraulic Technology Worldwide: Repair Parts Sheet P18 and P39, 1003 Hand PumpsPrashant Pawse100% (1)
- H201-1-7 Rev 1Document1 pageH201-1-7 Rev 1adel.gamha.gaNo ratings yet
- GTC SPECIAL ADAFTER-ModelDocument1 pageGTC SPECIAL ADAFTER-Modelsonj61915No ratings yet
- H201-1-5 Rev 1Document1 pageH201-1-5 Rev 1adel.gamha.gaNo ratings yet
- P1 RW Grids H V VRT A VRW HRT HRW Paste T P2 A1 Grid Weight A2 Weight Wet PasteDocument1 pageP1 RW Grids H V VRT A VRW HRT HRW Paste T P2 A1 Grid Weight A2 Weight Wet Pasteav3888871No ratings yet
- Steam Power Plant NotesDocument2 pagesSteam Power Plant NotesJuliana Marie VergaraNo ratings yet
- CD 1.1 - P10.1 - Grade 12 - Mech Assembly Question - June 2019Document2 pagesCD 1.1 - P10.1 - Grade 12 - Mech Assembly Question - June 2019Siyabonga NdumisoNo ratings yet
- Block Diagram: DDR IiiDocument51 pagesBlock Diagram: DDR Iiijoe wiillsonNo ratings yet
- Parts and Service Manual: For KPP15055Document111 pagesParts and Service Manual: For KPP15055masakpNo ratings yet
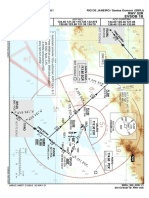
- SBRJ - Evsob 1b Rwy 02r - Sid - 20210520Document1 pageSBRJ - Evsob 1b Rwy 02r - Sid - 20210520Lucas FuterkoNo ratings yet
- DiagDocument4 pagesDiagIulia PipirigeanuNo ratings yet
- Wiring Diagrams FIAT SPIDER 124 TYPE BS (1969 - 1973) : OCTOBER 2006 Bradley J. ArtigueDocument27 pagesWiring Diagrams FIAT SPIDER 124 TYPE BS (1969 - 1973) : OCTOBER 2006 Bradley J. Artiguejorge Angel LopeNo ratings yet
- Clean Steam Generator-2Document71 pagesClean Steam Generator-2EwdinNo ratings yet
- Trusscadd Pksms - RanggoDocument6 pagesTrusscadd Pksms - RanggojunNo ratings yet
- Eng023-Fm01 3Document8 pagesEng023-Fm01 3Qa ValidationNo ratings yet
- Base Fix Driawing Flange Driawing: R900 R214 5 H7 Hole 165 165 4-M6 1P-7L P.C.D Ø63 45 h7Document1 pageBase Fix Driawing Flange Driawing: R900 R214 5 H7 Hole 165 165 4-M6 1P-7L P.C.D Ø63 45 h7franciscentenoNo ratings yet
- H 940700mef22 204ftu 01 - CDocument1 pageH 940700mef22 204ftu 01 - Cluca.laniNo ratings yet
- Gould 1.5x3 - 6, 10 HP at 3500 RPM PDFDocument1 pageGould 1.5x3 - 6, 10 HP at 3500 RPM PDFJavier LeonidasNo ratings yet
- Not For Engine Codes APF, AVU-02-01Document1 pageNot For Engine Codes APF, AVU-02-01Isaac YañezNo ratings yet
- Inyectores CrafterDocument1 pageInyectores CrafterAdrian CruzNo ratings yet
- Section 3 Hydraulic SystemDocument3 pagesSection 3 Hydraulic Systemdeniden2013No ratings yet
- g3.. Gear Pump..Re10039Document10 pagesg3.. Gear Pump..Re10039vijayramchandra88No ratings yet
- Hin To - Detesmine U Teility Dhe Saito3: RED Exot-4Document3 pagesHin To - Detesmine U Teility Dhe Saito3: RED Exot-4Shubh ShahNo ratings yet
- Eurasian Cities: New Realities along the Silk RoadFrom EverandEurasian Cities: New Realities along the Silk RoadRating: 3.5 out of 5 stars3.5/5 (1)
- Bid Acknowledgement: Eprocurement System Government of Madhya PradeshDocument1 pageBid Acknowledgement: Eprocurement System Government of Madhya PradeshdeepakpushpadNo ratings yet
- AFFIDAVITDocument1 pageAFFIDAVITdeepakpushpadNo ratings yet
- Assignment 2 - Report Anuj ShuklaDocument27 pagesAssignment 2 - Report Anuj ShukladeepakpushpadNo ratings yet
- E-Way Bill System 4Document1 pageE-Way Bill System 4deepakpushpadNo ratings yet
- 2018-858 - Approval Authorities Motor VehiclesDocument4 pages2018-858 - Approval Authorities Motor VehiclesdeepakpushpadNo ratings yet
- New Doc 2023-02-18 15.58.33Document1 pageNew Doc 2023-02-18 15.58.33deepakpushpadNo ratings yet
- Ae ZG614 Ec-2r First Sem 2022-2023Document3 pagesAe ZG614 Ec-2r First Sem 2022-2023deepakpushpadNo ratings yet
- Pine Editor ScriptDocument1 pagePine Editor ScriptdeepakpushpadNo ratings yet
- Beam DeflectionDocument9 pagesBeam DeflectiondeepakpushpadNo ratings yet
- Add Code Mill 2 Vehicle (2017)Document230 pagesAdd Code Mill 2 Vehicle (2017)SARINA MOHD ASRINo ratings yet
- Omni GearDocument198 pagesOmni GearCong Han NguyenNo ratings yet
- Sturmey-Archer AWC-SRC3-MANUAL PDFDocument5 pagesSturmey-Archer AWC-SRC3-MANUAL PDFtudorbusuiocNo ratings yet
- Flange Valves: Flange Mounted Pressure ControlsDocument64 pagesFlange Valves: Flange Mounted Pressure ControlsDanielEscobarMontecinosNo ratings yet
- Shimano Stradic ST8000FJ SchematicDocument1 pageShimano Stradic ST8000FJ SchematicolNo ratings yet
- Hydraulics and Pneumatics SyllabusDocument2 pagesHydraulics and Pneumatics SyllabusMulu Girmay67% (3)
- Module 2 Simple Mechanisms EditedDocument58 pagesModule 2 Simple Mechanisms EditedNirshadNo ratings yet
- Chapter 9 - Suggested ProblemsDocument10 pagesChapter 9 - Suggested Problemschanmyae toeyeeNo ratings yet
- 1995-2002 VW Derby Polo - 5 Speed Manual Gearbox 02J DSF DTA EKU EKV EKW EWY EWZ EXADocument227 pages1995-2002 VW Derby Polo - 5 Speed Manual Gearbox 02J DSF DTA EKU EKV EKW EWY EWZ EXARogelio Orozco Salas100% (1)
- Outstanding CMDocument71 pagesOutstanding CMadiraharjo738No ratings yet
- Manual Transmission Gears: EngineDocument5 pagesManual Transmission Gears: EngineQazi Zain SajjadNo ratings yet
- Repuestos Horno Teka ht490Document10 pagesRepuestos Horno Teka ht490IcursoCLNo ratings yet
- IW Quarter-Turn - MetricDocument6 pagesIW Quarter-Turn - MetricsrdNo ratings yet
- JCI Cataloge 2014Document60 pagesJCI Cataloge 2014KAZIMALI25No ratings yet
- Workshop Manual Transporter 2016 10-29Document109 pagesWorkshop Manual Transporter 2016 10-29samueleNo ratings yet
- PC300-7,8 System Function 201108Document40 pagesPC300-7,8 System Function 201108Cesar Cusii Lazoo100% (14)
- Triplex Pump Part 1Document30 pagesTriplex Pump Part 1Sergio Fabian VasicekNo ratings yet
- Aec-2348-01-1001 P&i DiagramDocument1 pageAec-2348-01-1001 P&i Diagramuma raneNo ratings yet
- 41 - Design News RPS Article PDFDocument1 page41 - Design News RPS Article PDFwilderness_666No ratings yet
- Double Acting, High Output Pump AssemblyDocument7 pagesDouble Acting, High Output Pump AssemblyJoseIgnacio1991No ratings yet
- 320C and 325C Excavators Hydraulic System - Attachment System, Ombined Function, Auxiliary Pump, Joystick With Slide ControlDocument2 pages320C and 325C Excavators Hydraulic System - Attachment System, Ombined Function, Auxiliary Pump, Joystick With Slide ControlЕвгений Абрамов100% (1)
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 216Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 216Andi KaNo ratings yet
- PL Federal Mei-2021Document36 pagesPL Federal Mei-2021Adib IrhamiNo ratings yet
- S770 Hyd SJC V-1605Document2 pagesS770 Hyd SJC V-1605Teknik MakinaNo ratings yet
- To Study Inversions of 4 Bar MechanismsDocument3 pagesTo Study Inversions of 4 Bar Mechanismsvijayshankar8750% (2)


























































































Download as pdf or txt
You might also like
- Automatic Rescue Device (A.R.D.) : User Manual & Wiring Diagram (For Roped Lift)Document6 pagesAutomatic Rescue Device (A.R.D.) : User Manual & Wiring Diagram (For Roped Lift)Tadeo Benegusenga100% (3)
- F4A4x at Manual PDFDocument135 pagesF4A4x at Manual PDFDener Rogerio Dos SantosNo ratings yet
- Xpi Fuel Circuit: Fuel Manifold Self-DrainingDocument1 pageXpi Fuel Circuit: Fuel Manifold Self-DrainingAbdelkader GouddiNo ratings yet
- Mercedes E270 Cdi Wiring Diagram Trailer Recognition Control ModuleDocument3 pagesMercedes E270 Cdi Wiring Diagram Trailer Recognition Control ModuleMircea GilcaNo ratings yet
- 6-Speed MTDocument34 pages6-Speed MTJijo MercyNo ratings yet
- Livina AT PDFDocument293 pagesLivina AT PDFAndika100% (1)
- 6 HP 19Document4 pages6 HP 19JhonsonNo ratings yet
- SS20Document1 pageSS20SauliusNo ratings yet
- Booster Pump and Ejector GuideDocument8 pagesBooster Pump and Ejector Guidegmurali2kNo ratings yet
- WI-158131-Drill Pipe Dart Assembly LayoutDocument1 pageWI-158131-Drill Pipe Dart Assembly LayoutMehdi NorouziNo ratings yet
- Dell Latitute 3340 Round Rock 13.3 13229 - Rx00Document99 pagesDell Latitute 3340 Round Rock 13.3 13229 - Rx00MukhlisinNo ratings yet
- Udin-Green City PharmacyDocument1 pageUdin-Green City PharmacyKanta AgarwalNo ratings yet
- GRAFIK REPAIR 2x BOLAK BALIK M1-JAN 2023Document4 pagesGRAFIK REPAIR 2x BOLAK BALIK M1-JAN 2023Shaka ManiaNo ratings yet
- Hefei Kangshite Intelligent Technology Co., Ltd.Document28 pagesHefei Kangshite Intelligent Technology Co., Ltd.张磊No ratings yet
- Eaton: Medium Duty Piston PumpDocument20 pagesEaton: Medium Duty Piston PumpChristian StalinNo ratings yet
- 3165 Ta3169fDocument1 page3165 Ta3169fRenalyn TorioNo ratings yet
- TFF0117RF-X Yaw Adjustment Drawing 1Document1 pageTFF0117RF-X Yaw Adjustment Drawing 1Miftah KurniawanNo ratings yet
- Se Pvy Insem PapersDocument9 pagesSe Pvy Insem Paperseditingop2003No ratings yet
- Instruction Manual - NB124 - Order No 262919,262920 - 4H100-1250HS+VSDocument71 pagesInstruction Manual - NB124 - Order No 262919,262920 - 4H100-1250HS+VSOscar AlexandersonNo ratings yet
- ZF As Tronic Schematic E PDF PDF Transmission (Mechanics) VehiclesDocument1 pageZF As Tronic Schematic E PDF PDF Transmission (Mechanics) Vehiclesariswidi03No ratings yet
- Practising Project 4Document1 pagePractising Project 4sunnysidemarket00No ratings yet
- Corte BB Corte BBDocument2 pagesCorte BB Corte BBsimons79No ratings yet
- Lay Out Power HouseDocument4 pagesLay Out Power HouseFauzan BenraxidNo ratings yet
- SS10Document1 pageSS10SauliusNo ratings yet
- Q3 AnswerkeyDocument3 pagesQ3 AnswerkeyAnn NavarroNo ratings yet
- Cambridge IGCSE: PHYSICS 0625/53Document12 pagesCambridge IGCSE: PHYSICS 0625/53Ahaan DangiNo ratings yet
- Edur Vbu Series Dimensions 1Document1 pageEdur Vbu Series Dimensions 1Mohammad HosseinNo ratings yet
- DELL Latitude E3340 DLR30 13229-1 A00Document99 pagesDELL Latitude E3340 DLR30 13229-1 A00Elison Quezada100% (1)
- Part Drawing Sheet1Document1 pagePart Drawing Sheet1Shrikrushna MaliNo ratings yet
- Power Transmission 1Document3 pagesPower Transmission 1Rendi wijayaNo ratings yet
- Quanta LZ3C Rev 2a - Lenovo Ideapad z585Document51 pagesQuanta LZ3C Rev 2a - Lenovo Ideapad z585Raj kishorNo ratings yet
- Pressure Sensor With Relay Output PC250-Gi1/4A1M-ARX-B1151: Outp Ut1Document2 pagesPressure Sensor With Relay Output PC250-Gi1/4A1M-ARX-B1151: Outp Ut1CesarNo ratings yet
- A1New 5.9.24updatefireDocument8 pagesA1New 5.9.24updatefirekingacezprezNo ratings yet
- API 650 Tank Design Calculationxls Energy and CompressDocument8 pagesAPI 650 Tank Design Calculationxls Energy and CompressTech ManagerNo ratings yet
- Api 650 Tank Design Calculationxls Energy andDocument8 pagesApi 650 Tank Design Calculationxls Energy andjalil ahmedNo ratings yet
- R.004 - Cofraj Si Detalii Armare Fundatii GF - 1 - A3 297x900Document1 pageR.004 - Cofraj Si Detalii Armare Fundatii GF - 1 - A3 297x900BogdanIngNo ratings yet
- PLVRLFRW: AK-AK (1:2.5)Document1 pagePLVRLFRW: AK-AK (1:2.5)Eduardo RodriguezNo ratings yet
- Plate Pusher LH: Design Engineering SecondaryDocument1 pagePlate Pusher LH: Design Engineering Secondaryarief yuliantoNo ratings yet
- API 650 Tank Design Calculationxls Energy and CompressDocument8 pagesAPI 650 Tank Design Calculationxls Energy and Compressجيلالي نفوسيNo ratings yet
- Kompre 17 - 18 Sesi 1Document71 pagesKompre 17 - 18 Sesi 1wdafwinmNo ratings yet
- Hydraulic Technology Worldwide: Repair Parts Sheet P18 and P39, 1003 Hand PumpsDocument2 pagesHydraulic Technology Worldwide: Repair Parts Sheet P18 and P39, 1003 Hand PumpsPrashant Pawse100% (1)
- H201-1-7 Rev 1Document1 pageH201-1-7 Rev 1adel.gamha.gaNo ratings yet
- GTC SPECIAL ADAFTER-ModelDocument1 pageGTC SPECIAL ADAFTER-Modelsonj61915No ratings yet
- H201-1-5 Rev 1Document1 pageH201-1-5 Rev 1adel.gamha.gaNo ratings yet
- P1 RW Grids H V VRT A VRW HRT HRW Paste T P2 A1 Grid Weight A2 Weight Wet PasteDocument1 pageP1 RW Grids H V VRT A VRW HRT HRW Paste T P2 A1 Grid Weight A2 Weight Wet Pasteav3888871No ratings yet
- Steam Power Plant NotesDocument2 pagesSteam Power Plant NotesJuliana Marie VergaraNo ratings yet
- CD 1.1 - P10.1 - Grade 12 - Mech Assembly Question - June 2019Document2 pagesCD 1.1 - P10.1 - Grade 12 - Mech Assembly Question - June 2019Siyabonga NdumisoNo ratings yet
- Block Diagram: DDR IiiDocument51 pagesBlock Diagram: DDR Iiijoe wiillsonNo ratings yet
- Parts and Service Manual: For KPP15055Document111 pagesParts and Service Manual: For KPP15055masakpNo ratings yet
- SBRJ - Evsob 1b Rwy 02r - Sid - 20210520Document1 pageSBRJ - Evsob 1b Rwy 02r - Sid - 20210520Lucas FuterkoNo ratings yet
- DiagDocument4 pagesDiagIulia PipirigeanuNo ratings yet
- Wiring Diagrams FIAT SPIDER 124 TYPE BS (1969 - 1973) : OCTOBER 2006 Bradley J. ArtigueDocument27 pagesWiring Diagrams FIAT SPIDER 124 TYPE BS (1969 - 1973) : OCTOBER 2006 Bradley J. Artiguejorge Angel LopeNo ratings yet
- Clean Steam Generator-2Document71 pagesClean Steam Generator-2EwdinNo ratings yet
- Trusscadd Pksms - RanggoDocument6 pagesTrusscadd Pksms - RanggojunNo ratings yet
- Eng023-Fm01 3Document8 pagesEng023-Fm01 3Qa ValidationNo ratings yet
- Base Fix Driawing Flange Driawing: R900 R214 5 H7 Hole 165 165 4-M6 1P-7L P.C.D Ø63 45 h7Document1 pageBase Fix Driawing Flange Driawing: R900 R214 5 H7 Hole 165 165 4-M6 1P-7L P.C.D Ø63 45 h7franciscentenoNo ratings yet
- H 940700mef22 204ftu 01 - CDocument1 pageH 940700mef22 204ftu 01 - Cluca.laniNo ratings yet
- Gould 1.5x3 - 6, 10 HP at 3500 RPM PDFDocument1 pageGould 1.5x3 - 6, 10 HP at 3500 RPM PDFJavier LeonidasNo ratings yet
- Not For Engine Codes APF, AVU-02-01Document1 pageNot For Engine Codes APF, AVU-02-01Isaac YañezNo ratings yet
- Inyectores CrafterDocument1 pageInyectores CrafterAdrian CruzNo ratings yet
- Section 3 Hydraulic SystemDocument3 pagesSection 3 Hydraulic Systemdeniden2013No ratings yet
- g3.. Gear Pump..Re10039Document10 pagesg3.. Gear Pump..Re10039vijayramchandra88No ratings yet
- Hin To - Detesmine U Teility Dhe Saito3: RED Exot-4Document3 pagesHin To - Detesmine U Teility Dhe Saito3: RED Exot-4Shubh ShahNo ratings yet
- Eurasian Cities: New Realities along the Silk RoadFrom EverandEurasian Cities: New Realities along the Silk RoadRating: 3.5 out of 5 stars3.5/5 (1)
- Bid Acknowledgement: Eprocurement System Government of Madhya PradeshDocument1 pageBid Acknowledgement: Eprocurement System Government of Madhya PradeshdeepakpushpadNo ratings yet
- AFFIDAVITDocument1 pageAFFIDAVITdeepakpushpadNo ratings yet
- Assignment 2 - Report Anuj ShuklaDocument27 pagesAssignment 2 - Report Anuj ShukladeepakpushpadNo ratings yet
- E-Way Bill System 4Document1 pageE-Way Bill System 4deepakpushpadNo ratings yet
- 2018-858 - Approval Authorities Motor VehiclesDocument4 pages2018-858 - Approval Authorities Motor VehiclesdeepakpushpadNo ratings yet
- New Doc 2023-02-18 15.58.33Document1 pageNew Doc 2023-02-18 15.58.33deepakpushpadNo ratings yet
- Ae ZG614 Ec-2r First Sem 2022-2023Document3 pagesAe ZG614 Ec-2r First Sem 2022-2023deepakpushpadNo ratings yet
- Pine Editor ScriptDocument1 pagePine Editor ScriptdeepakpushpadNo ratings yet
- Beam DeflectionDocument9 pagesBeam DeflectiondeepakpushpadNo ratings yet
- Add Code Mill 2 Vehicle (2017)Document230 pagesAdd Code Mill 2 Vehicle (2017)SARINA MOHD ASRINo ratings yet
- Omni GearDocument198 pagesOmni GearCong Han NguyenNo ratings yet
- Sturmey-Archer AWC-SRC3-MANUAL PDFDocument5 pagesSturmey-Archer AWC-SRC3-MANUAL PDFtudorbusuiocNo ratings yet
- Flange Valves: Flange Mounted Pressure ControlsDocument64 pagesFlange Valves: Flange Mounted Pressure ControlsDanielEscobarMontecinosNo ratings yet
- Shimano Stradic ST8000FJ SchematicDocument1 pageShimano Stradic ST8000FJ SchematicolNo ratings yet
- Hydraulics and Pneumatics SyllabusDocument2 pagesHydraulics and Pneumatics SyllabusMulu Girmay67% (3)
- Module 2 Simple Mechanisms EditedDocument58 pagesModule 2 Simple Mechanisms EditedNirshadNo ratings yet
- Chapter 9 - Suggested ProblemsDocument10 pagesChapter 9 - Suggested Problemschanmyae toeyeeNo ratings yet
- 1995-2002 VW Derby Polo - 5 Speed Manual Gearbox 02J DSF DTA EKU EKV EKW EWY EWZ EXADocument227 pages1995-2002 VW Derby Polo - 5 Speed Manual Gearbox 02J DSF DTA EKU EKV EKW EWY EWZ EXARogelio Orozco Salas100% (1)
- Outstanding CMDocument71 pagesOutstanding CMadiraharjo738No ratings yet
- Manual Transmission Gears: EngineDocument5 pagesManual Transmission Gears: EngineQazi Zain SajjadNo ratings yet
- Repuestos Horno Teka ht490Document10 pagesRepuestos Horno Teka ht490IcursoCLNo ratings yet
- IW Quarter-Turn - MetricDocument6 pagesIW Quarter-Turn - MetricsrdNo ratings yet
- JCI Cataloge 2014Document60 pagesJCI Cataloge 2014KAZIMALI25No ratings yet
- Workshop Manual Transporter 2016 10-29Document109 pagesWorkshop Manual Transporter 2016 10-29samueleNo ratings yet
- PC300-7,8 System Function 201108Document40 pagesPC300-7,8 System Function 201108Cesar Cusii Lazoo100% (14)
- Triplex Pump Part 1Document30 pagesTriplex Pump Part 1Sergio Fabian VasicekNo ratings yet
- Aec-2348-01-1001 P&i DiagramDocument1 pageAec-2348-01-1001 P&i Diagramuma raneNo ratings yet
- 41 - Design News RPS Article PDFDocument1 page41 - Design News RPS Article PDFwilderness_666No ratings yet
- Double Acting, High Output Pump AssemblyDocument7 pagesDouble Acting, High Output Pump AssemblyJoseIgnacio1991No ratings yet
- 320C and 325C Excavators Hydraulic System - Attachment System, Ombined Function, Auxiliary Pump, Joystick With Slide ControlDocument2 pages320C and 325C Excavators Hydraulic System - Attachment System, Ombined Function, Auxiliary Pump, Joystick With Slide ControlЕвгений Абрамов100% (1)
- Manual de Taller Excavadora Hitachi Zx200 225 230 270 - 216Document1 pageManual de Taller Excavadora Hitachi Zx200 225 230 270 - 216Andi KaNo ratings yet
- PL Federal Mei-2021Document36 pagesPL Federal Mei-2021Adib IrhamiNo ratings yet
- S770 Hyd SJC V-1605Document2 pagesS770 Hyd SJC V-1605Teknik MakinaNo ratings yet
- To Study Inversions of 4 Bar MechanismsDocument3 pagesTo Study Inversions of 4 Bar Mechanismsvijayshankar8750% (2)