Download as docx, pdf, or txt
You might also like
- Humidity & Temperature Monitoring System by Using ArduinoDocument53 pagesHumidity & Temperature Monitoring System by Using ArduinoMohammad Yasir100% (9)
- Repair Parts 2015 Service and Support Catalog PDFDocument810 pagesRepair Parts 2015 Service and Support Catalog PDFIventNo ratings yet
- Alphagage + Manual - v5Document80 pagesAlphagage + Manual - v5JC Schwartz100% (2)
- Solar CultivatorDocument41 pagesSolar CultivatorAnonymous ytZsBOVNo ratings yet
- Radar ReportDocument16 pagesRadar ReportMANJOSH Roy 18No ratings yet
- 1mv19ec112-Project ReportDocument46 pages1mv19ec112-Project ReportRiahabh jainNo ratings yet
- Microstrip Pacth Antenna For X-Band Application ReportDocument34 pagesMicrostrip Pacth Antenna For X-Band Application ReportPriyanshu SinghNo ratings yet
- Motion DectectorDocument34 pagesMotion DectectorINDIAN ICONICNo ratings yet
- Seminar Report - Optical Fiber Communicatin FairDocument18 pagesSeminar Report - Optical Fiber Communicatin Fair14 Devika SNo ratings yet
- 1mv19ec112 Project ReportDocument45 pages1mv19ec112 Project ReportRiahabh jainNo ratings yet
- Implementation of A Child Rescue System From BorewellDocument8 pagesImplementation of A Child Rescue System From BorewellaavulaganeshcseNo ratings yet
- Panja Mini ProjectDocument3 pagesPanja Mini ProjectLil KidNo ratings yet
- A&U DM DOC Mini ProDocument49 pagesA&U DM DOC Mini ProPriyaNo ratings yet
- Group 3 Home Security System...Document30 pagesGroup 3 Home Security System...Akshay AchuNo ratings yet
- Automated Railway Announcement Using Zigbee ProtocolDocument18 pagesAutomated Railway Announcement Using Zigbee Protocolsree2728No ratings yet
- Soumen ThesisDocument59 pagesSoumen Thesissoumen maityNo ratings yet
- Temperature and Humidity SensorDocument13 pagesTemperature and Humidity SensorOmkar SharmaNo ratings yet
- Ultralow Power Iot Solution Based On WSSN For Monitoring InfrastructuresDocument4 pagesUltralow Power Iot Solution Based On WSSN For Monitoring InfrastructuresLuís Miguel Rego PiresNo ratings yet
- DevelopmentofaLinearMicro InductosynSensorDocument4 pagesDevelopmentofaLinearMicro InductosynSensorMarcelo BaptistaNo ratings yet
- Minorproject Smoke, Gasdetector PDFDocument29 pagesMinorproject Smoke, Gasdetector PDFKaif QureshiNo ratings yet
- 6 II February 2018Document6 pages6 II February 2018oyukiisaacNo ratings yet
- Metamaterial-Based Sensor Integrating Microwave Dielectric and Near-Infrared Spectroscopy Techniques For Substance EvaluationDocument8 pagesMetamaterial-Based Sensor Integrating Microwave Dielectric and Near-Infrared Spectroscopy Techniques For Substance EvaluationRicardo Hiroshi MinodaNo ratings yet
- JCGHVKL/JBKHJGHHDocument34 pagesJCGHVKL/JBKHJGHHsonu sk100% (1)
- Microprocesser Iot ChipDocument11 pagesMicroprocesser Iot Chipsfhjxdgh83No ratings yet
- Design of Broad Band and High Gain Microstrip Antenna Using MetamaterialsDocument58 pagesDesign of Broad Band and High Gain Microstrip Antenna Using MetamaterialsAli SalehNo ratings yet
- Report Mini ProjectDocument16 pagesReport Mini ProjectAbhilash Chandran JNo ratings yet
- Home AutomationDocument18 pagesHome Automationmayankvis321No ratings yet
- Smart Dustbin in Progress Auto RecoveredDocument31 pagesSmart Dustbin in Progress Auto RecoveredPatel JiNo ratings yet
- Design and Research of Wireless Optical Power Meter Based o - 2023 - Results inDocument6 pagesDesign and Research of Wireless Optical Power Meter Based o - 2023 - Results inronaldquezada038No ratings yet
- Electrical and Electronics Mini Project Report On Control of PC With TV Remote Cusat UniversityDocument61 pagesElectrical and Electronics Mini Project Report On Control of PC With TV Remote Cusat UniversityAju MtNo ratings yet
- Rising Power Supply PaperDocument26 pagesRising Power Supply PaperManoj EmmidesettyNo ratings yet
- Technical Seminar Report Udday SruthiDocument18 pagesTechnical Seminar Report Udday SruthiBhanu TummalapalliNo ratings yet
- Ultrasonic Distance SensorDocument6 pagesUltrasonic Distance SensorJunaid AhmedNo ratings yet
- Sample - Synopsis Final DR Mamta SoodDocument18 pagesSample - Synopsis Final DR Mamta SoodSourabh TiwariNo ratings yet
- Design of Single-Notched Small Square Ring Monopole Antenna For UWB ApplicationsDocument72 pagesDesign of Single-Notched Small Square Ring Monopole Antenna For UWB ApplicationsKumarJinneNo ratings yet
- Project Report Front PageDocument8 pagesProject Report Front Pagejawalkar bharani kumarNo ratings yet
- Wireless Senswor NetworkingDocument22 pagesWireless Senswor Networkingmilandixit01No ratings yet
- Final Project - Report - Batch-11Document58 pagesFinal Project - Report - Batch-11udayreddybusiNo ratings yet
- Ir Proximaty Sensor Project Report.Document20 pagesIr Proximaty Sensor Project Report.JINTO V JAYANNo ratings yet
- Ijece - Sewage Block Identification and Rescue System Using Wireless Sensor - 1Document6 pagesIjece - Sewage Block Identification and Rescue System Using Wireless Sensor - 1iaset123No ratings yet
- Minor Project SynopsisDocument10 pagesMinor Project Synopsisvishal chanyalNo ratings yet
- Mini Project ReportDocument32 pagesMini Project ReportMaharnab K.No ratings yet
- IOT AssignDocument17 pagesIOT AssignMuskaan KumariNo ratings yet
- Compact Planar Inverted-F Antenna For Microsats Omnidirectional CommunicationsDocument40 pagesCompact Planar Inverted-F Antenna For Microsats Omnidirectional CommunicationsKalyan Reddy AnuguNo ratings yet
- Minor Project PDFDocument28 pagesMinor Project PDFKaif QureshiNo ratings yet
- Wireless Charging of Moble Phone Using Microwaves: Technical Seminar ReportDocument40 pagesWireless Charging of Moble Phone Using Microwaves: Technical Seminar ReportChemudupati Sunil100% (2)
- REPORTDocument14 pagesREPORTSaddam AbdullahNo ratings yet
- Reverse Parking Sensor: IarjsetDocument3 pagesReverse Parking Sensor: Iarjsetعمل الخيرNo ratings yet
- Automatic Tunnel Lighting System For Road Traffic With Auto Exhaust FanDocument17 pagesAutomatic Tunnel Lighting System For Road Traffic With Auto Exhaust FanIJRASETPublicationsNo ratings yet
- Ventilator Report EditedDocument31 pagesVentilator Report Editednirajaadithya.dasireddiNo ratings yet
- FinalDocument58 pagesFinalhemamaheswarikasireddy99No ratings yet
- Simple Method For Non Contact Thickness Gauge UsinDocument7 pagesSimple Method For Non Contact Thickness Gauge Usinsusankar22-530No ratings yet
- Fault Detection in Transmission Line Using GSM Technology 4301,4304,4313Document67 pagesFault Detection in Transmission Line Using GSM Technology 4301,4304,4313naveen gNo ratings yet
- Cable Fault DetectionDocument29 pagesCable Fault DetectioneparkrcbNo ratings yet
- Iot FinalDocument19 pagesIot Finallokotwiststudio2No ratings yet
- Patients Health Monitoring Using IotDocument24 pagesPatients Health Monitoring Using IotJoshitha nuluNo ratings yet
- 813820112016-Mini ProjectDocument5 pages813820112016-Mini ProjectYokes WaranNo ratings yet
- "Ultra Sonic Distance Meter": B T I E EDocument17 pages"Ultra Sonic Distance Meter": B T I E EKiran maruNo ratings yet
- Ilovepdf Merged OrganizedDocument18 pagesIlovepdf Merged Organizedmallikarjuna pottiNo ratings yet
- Technical Seminar Report-SampleDocument23 pagesTechnical Seminar Report-Samplearram mounika03No ratings yet
- Microwave and Millimeter Wave Circuits and Systems: Emerging Design, Technologies and ApplicationsFrom EverandMicrowave and Millimeter Wave Circuits and Systems: Emerging Design, Technologies and ApplicationsNo ratings yet
- Design and Implementation of Portable Impedance AnalyzersFrom EverandDesign and Implementation of Portable Impedance AnalyzersNo ratings yet
- Dry Scrubber: Refreshing Environment Refreshing YouDocument8 pagesDry Scrubber: Refreshing Environment Refreshing YouGM EdgardNo ratings yet
- 4 RC Phase Shift Oscillator Using TransistorsDocument5 pages4 RC Phase Shift Oscillator Using TransistorsdamasNo ratings yet
- PCS-9705 - X - Instruction Manual - EN - General - X - R1.02 - (EN - CKZZ5305.0086.0003) PDFDocument233 pagesPCS-9705 - X - Instruction Manual - EN - General - X - R1.02 - (EN - CKZZ5305.0086.0003) PDFngocanhvy100% (1)
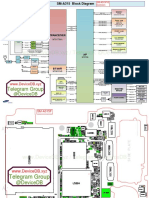
- Troubleshooting SM A315F UnlockedDocument28 pagesTroubleshooting SM A315F UnlockedРемонт КомпьютеровNo ratings yet
- D400 Hardware Users Guide R1.2Document122 pagesD400 Hardware Users Guide R1.2valkm2306No ratings yet
- Mov 250L20Document403 pagesMov 250L20Jonathan BengcoNo ratings yet
- MSCIT Questions and AnswersDocument12 pagesMSCIT Questions and AnswersChamika Madushan ManawaduNo ratings yet
- Line Differential Protection Modeling With Composite Current and Voltage Signal Comparison MethodDocument11 pagesLine Differential Protection Modeling With Composite Current and Voltage Signal Comparison MethodJay F. KuizonNo ratings yet
- Chapter 06 - WavesDocument9 pagesChapter 06 - WavesAl NazurisNo ratings yet
- Jee (Advanced) Online Test Series: Class XIIDocument1 pageJee (Advanced) Online Test Series: Class XIINameet JainNo ratings yet
- VGA Controller User GuideDocument11 pagesVGA Controller User GuideHoàng Thái SơnNo ratings yet
- InstallDocument3 pagesInstall123juanreyesNo ratings yet
- AO DataSheet SFP ReferenciaDocument2 pagesAO DataSheet SFP ReferenciaAntero CasaniNo ratings yet
- Panasonic's Basic Electrical Safety TipsDocument13 pagesPanasonic's Basic Electrical Safety TipsRobert Oconer AguilarNo ratings yet
- IJEDR1802085Document6 pagesIJEDR1802085Rizky RamadhaniNo ratings yet
- Si KaDocument12 pagesSi KanasmineNo ratings yet
- Huawei Drive Test Solution V1 0 20110824Document26 pagesHuawei Drive Test Solution V1 0 20110824jaymart lunaNo ratings yet
- Code Converters, Multiplexers, and DemultiplexersDocument34 pagesCode Converters, Multiplexers, and DemultiplexersjohnsamvlbNo ratings yet
- The New World Standard For Power Quality AnalysisDocument12 pagesThe New World Standard For Power Quality AnalysisMostafa El SayedNo ratings yet
- Short Circuit Ratio of A Synchronous MachineDocument4 pagesShort Circuit Ratio of A Synchronous MachinerabiNo ratings yet
- Transformadores de PotenciaDocument20 pagesTransformadores de PotenciajuevesNo ratings yet
- PM700 ManualDocument192 pagesPM700 ManualsiggoNo ratings yet
- Battery, Charger, Ups System - NewDocument32 pagesBattery, Charger, Ups System - NewDheeraj Kumar PendyalaNo ratings yet
- List of Components For Embedded Systems Lab - Monsoon 2020: 6 Servo Motor 78-00 1 78-00Document2 pagesList of Components For Embedded Systems Lab - Monsoon 2020: 6 Servo Motor 78-00 1 78-00VamsiNo ratings yet
- PhilipsMP2Demux 15176Document84 pagesPhilipsMP2Demux 15176ndzervasNo ratings yet
- Chapter 8Document31 pagesChapter 8fosterNo ratings yet
- Gpmp0760 Manual v2Document2 pagesGpmp0760 Manual v2Virendra GaurNo ratings yet
- Computer Fundamental PDFDocument143 pagesComputer Fundamental PDFSudhir GulekarNo ratings yet