Download as pdf or txt
You might also like
- Giai Bai Tap 2Document15 pagesGiai Bai Tap 2Jacky Nguyen100% (4)
- Turnip28 V16a Core RulesDocument73 pagesTurnip28 V16a Core RulesСлавік БачинськийNo ratings yet
- Sesson - Ii: Dynamic ProgrammingDocument4 pagesSesson - Ii: Dynamic ProgrammingrambabudugyaniNo ratings yet
- Daa Unit-3Document32 pagesDaa Unit-3pihadar269No ratings yet
- DAA Travelling SalesmanDocument3 pagesDAA Travelling Salesmanmayushbbk18No ratings yet
- PAA Dynamic ProgrammingDocument14 pagesPAA Dynamic ProgrammingRichmafia21No ratings yet
- DynamicDocument18 pagesDynamicBhavini Rajendrakumar BhattNo ratings yet
- Design & Analysis of Algorithms (DAA) Unit - IIIDocument17 pagesDesign & Analysis of Algorithms (DAA) Unit - IIIYogi NambulaNo ratings yet
- Assignment Chapter03 NguyenCaoTrungKien QE170207 SE17B02Document5 pagesAssignment Chapter03 NguyenCaoTrungKien QE170207 SE17B02Rai YugiNo ratings yet
- CH3. Dynamic Programming (DP) : - Mergesort, Quicksort, Binary SearchDocument22 pagesCH3. Dynamic Programming (DP) : - Mergesort, Quicksort, Binary SearchJungWoo ChoNo ratings yet
- R QuestionsDocument5 pagesR QuestionsNatiqNo ratings yet
- Dynamic Programming: Example: If N 10, RDocument16 pagesDynamic Programming: Example: If N 10, RrambabudugyaniNo ratings yet
- PDF Solutions Manual To Accompany Passage To Abstract Mathematics 9780321738639 Online Ebook Full ChapterDocument38 pagesPDF Solutions Manual To Accompany Passage To Abstract Mathematics 9780321738639 Online Ebook Full Chaptersamuel.byrd868100% (9)
- Dynamic ProgrammingDocument23 pagesDynamic ProgrammingHydroNo ratings yet
- Business MathematicsDocument14 pagesBusiness MathematicsamityscribdNo ratings yet
- 14-Elliptic Curve Cryptography (ECC) - 27!02!2024Document31 pages14-Elliptic Curve Cryptography (ECC) - 27!02!2024YashNo ratings yet
- Dynamic ProgrammingDocument28 pagesDynamic ProgrammingAmisha SharmaNo ratings yet
- DAA U-4 Dynamic ProgrammingDocument23 pagesDAA U-4 Dynamic Programmings.s.r.k.m. guptaNo ratings yet
- Min Cost PathDocument10 pagesMin Cost PathAnandPandyaNo ratings yet
- KnapsackDocument28 pagesKnapsackpricifelixNo ratings yet
- DAA Dynamic ProgrammingDocument35 pagesDAA Dynamic ProgrammingsaliniprabhaNo ratings yet
- Palm ch4Document36 pagesPalm ch4A Raheem Siddiqui100% (1)
- Co SC 3131 Chap 4Document54 pagesCo SC 3131 Chap 4hagosabate9No ratings yet
- MatlabDocument6 pagesMatlabCommon ManNo ratings yet
- I211381 DSM Algo1Document8 pagesI211381 DSM Algo1I211381 Eeman IjazNo ratings yet
- Matrix InverseDocument2 pagesMatrix Inversemustafa alasadyNo ratings yet
- NPTEL R Programming Assignments2019 PDFDocument106 pagesNPTEL R Programming Assignments2019 PDFKalyan Ram100% (2)
- Document 1Document3 pagesDocument 1mi5a.saad12345No ratings yet
- Solution: Attempt Any Five Out of Six. Each Question Carries 6 MarksDocument21 pagesSolution: Attempt Any Five Out of Six. Each Question Carries 6 MarksKothai KothaiNo ratings yet
- Design and Analysis of Algorithms Assignment 3Document5 pagesDesign and Analysis of Algorithms Assignment 3AnasNo ratings yet
- OGBEKILE EEG 407 ReportDocument7 pagesOGBEKILE EEG 407 ReportDjNo ratings yet
- Sample Test2dDocument8 pagesSample Test2dkhalil alhatabNo ratings yet
- Government College of Engineering Amravati: CertificateDocument19 pagesGovernment College of Engineering Amravati: Certificatead aNo ratings yet
- Hasofer and Lind MethodDocument15 pagesHasofer and Lind MethodLemtek11No ratings yet
- PPT6 - Dynamic Programming Multistage Graph & Travelling Salesman ProblemDocument23 pagesPPT6 - Dynamic Programming Multistage Graph & Travelling Salesman ProblemAditya wahyu50% (2)
- Solución de La Asignación 1 Del Curso de R: 1. SolucionesDocument14 pagesSolución de La Asignación 1 Del Curso de R: 1. SolucionesjuanNo ratings yet
- 07-09-201412th Solution P-1Document8 pages07-09-201412th Solution P-1asuhassNo ratings yet
- Unit 3 - Analysis Design of Algorithm - WWW - Rgpvnotes.inDocument8 pagesUnit 3 - Analysis Design of Algorithm - WWW - Rgpvnotes.inPranjal ChawdaNo ratings yet
- Daa Assignment 3Document16 pagesDaa Assignment 3Logan XmenNo ratings yet
- 20220701173555D6434 - 20200720221524D5797 - 20180725175948D5542 - COMP6049 Pert 14Document15 pages20220701173555D6434 - 20200720221524D5797 - 20180725175948D5542 - COMP6049 Pert 14Christopher SoeliantoNo ratings yet
- Program#1Document20 pagesProgram#1Bashir AlsadawiNo ratings yet
- Crpytography and Network Security Lab Assignment: Experiment 2BDocument13 pagesCrpytography and Network Security Lab Assignment: Experiment 2BHarsimran SinghNo ratings yet
- 120cs0142 Daa Assignment 3Document12 pages120cs0142 Daa Assignment 3devraj changkakatiNo ratings yet
- Hack With Inf YDocument9 pagesHack With Inf YPrem satvik reddyNo ratings yet
- Quiz TasksDocument29 pagesQuiz TasksSadia GulNo ratings yet
- Madf Exp2Document17 pagesMadf Exp2Amisha SharmaNo ratings yet
- CS 384: AAD Laboratory Assignment-II Soumya Gourab Sahoo: Q.5. STRASSENS's Matrix MultiplicationDocument27 pagesCS 384: AAD Laboratory Assignment-II Soumya Gourab Sahoo: Q.5. STRASSENS's Matrix MultiplicationSubhransu DalaiNo ratings yet
- Nota Matematik Tingkatan 4 Dan 5 SPMDocument25 pagesNota Matematik Tingkatan 4 Dan 5 SPMFadzil Ishak83% (6)
- NSM Practical Sem II1Document12 pagesNSM Practical Sem II1Mr.Hacker AnupNo ratings yet
- Melissa Njenga - ICS 2411 Cryptography AssignmentDocument8 pagesMelissa Njenga - ICS 2411 Cryptography AssignmentMelissa JoyNo ratings yet
- Chapter Four and FiveDocument56 pagesChapter Four and Fivehagosabate9No ratings yet
- Ada Lab ManaulDocument27 pagesAda Lab ManaulAman SinghNo ratings yet
- Analytic Geometry: Graphic Solutions Using Matlab LanguageFrom EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguageNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- De Moiver's Theorem (Trigonometry) Mathematics Question BankFrom EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankNo ratings yet
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankFrom EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNo ratings yet
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeFrom EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNo ratings yet
- CD LaqsDocument29 pagesCD LaqsShashank TNo ratings yet
- CD Unit-IDocument21 pagesCD Unit-IShashank TNo ratings yet
- ML Unit-IvDocument136 pagesML Unit-IvShashank TNo ratings yet
- DPPM Unit - IiiDocument18 pagesDPPM Unit - IiiShashank TNo ratings yet
- Sketchup Ur Space Dec 2013Document40 pagesSketchup Ur Space Dec 2013EryAjaDeh100% (1)
- Simple Sentence and Subject Verb AgreementDocument4 pagesSimple Sentence and Subject Verb AgreementAre prety neldaNo ratings yet
- Using MLAG in Dell Networks v1.3Document33 pagesUsing MLAG in Dell Networks v1.3Damian CostantinoNo ratings yet
- TP Complete UserManual 1.2Document66 pagesTP Complete UserManual 1.2BENEGUSENGA TADEONo ratings yet
- Cell Phone Radiation PresentationDocument16 pagesCell Phone Radiation PresentationCeasar CoolNo ratings yet
- Electro-Plating For The AmateurDocument114 pagesElectro-Plating For The AmateurmangyanNo ratings yet
- Total Final Weight of Job KGDocument38 pagesTotal Final Weight of Job KGx30patelNo ratings yet
- Vmware Vsphere - Pricing White Paper PDFDocument12 pagesVmware Vsphere - Pricing White Paper PDFsabeelshakirNo ratings yet
- D 2Document9 pagesD 2jhouvanNo ratings yet
- Radio Link FailureDocument19 pagesRadio Link FailureDeepanshu SharmaNo ratings yet
- Retail Management Final ExamDocument17 pagesRetail Management Final ExamAkhilesh JadhavNo ratings yet
- Secrets of The Abundant Life SermonDocument4 pagesSecrets of The Abundant Life SermonJohnmarc Prince Montano100% (2)
- Koh, Khee Meng - Tay Eng Guan, - Dong, F. M - Introduction To Graph Theory - Solutions Manual-World Scientific Publishing Company (2008 - 2007)Document262 pagesKoh, Khee Meng - Tay Eng Guan, - Dong, F. M - Introduction To Graph Theory - Solutions Manual-World Scientific Publishing Company (2008 - 2007)vahide khodadiNo ratings yet
- Vibrotip Web PAM1Document8 pagesVibrotip Web PAM1Bahtiar YudhistiraNo ratings yet
- Roll No. Name PPO/PPI/Finals Final CompanyDocument48 pagesRoll No. Name PPO/PPI/Finals Final CompanyYash AgarwalNo ratings yet
- GR 19 (MND)Document6 pagesGR 19 (MND)arorayash603No ratings yet
- Lista de Precios 03 de DiciembreDocument33 pagesLista de Precios 03 de DiciembreRafael Kotty Cab TuzNo ratings yet
- Abap Webdynpro Tips For Beginners: Windows and ViewsDocument14 pagesAbap Webdynpro Tips For Beginners: Windows and ViewsEr.Tousif MollickNo ratings yet
- Saying Hello PDFDocument5 pagesSaying Hello PDFCAMILO ANDRES ACERO SUAREZNo ratings yet
- Consumer NeuroScienceDocument16 pagesConsumer NeuroScienceBinaNo ratings yet
- Laplace TransformsDocument22 pagesLaplace TransformsAustin JamesNo ratings yet
- Addmrpt 1 11340 11341Document10 pagesAddmrpt 1 11340 11341PraveenNo ratings yet
- Offshore CNY Best Practice Guidelines For ConsultationDocument28 pagesOffshore CNY Best Practice Guidelines For Consultationargus-kerberNo ratings yet
- Oworin Meji Falokun Fatumbi Awo Ifa World PerspectiveDocument13 pagesOworin Meji Falokun Fatumbi Awo Ifa World PerspectiveLevy Braunstein100% (1)
- Management Strategies For Primary Dysmenorrhea: 9.1 Topic OverviewDocument19 pagesManagement Strategies For Primary Dysmenorrhea: 9.1 Topic OverviewAgusdiwana SuarniNo ratings yet
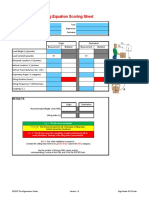
- NIOSH Lifting Equation Scoring Sheet: ResultsDocument5 pagesNIOSH Lifting Equation Scoring Sheet: ResultsLucio VieiraNo ratings yet
- CATIA - Human Builder & SimulationDocument2 pagesCATIA - Human Builder & Simulationguen_betonamuNo ratings yet
- Key, Scripts BIG STEP TOEIC 3 - Actual Test 3 - EFIS EnglishDocument7 pagesKey, Scripts BIG STEP TOEIC 3 - Actual Test 3 - EFIS EnglishThao NguyenNo ratings yet
- The Pretenders WorkpackDocument30 pagesThe Pretenders WorkpackMaría José PucilloNo ratings yet