Download as pdf or txt
You might also like
- Sessional-Ii Exams (Paper+solution)Document5 pagesSessional-Ii Exams (Paper+solution)Sohaib IrfanNo ratings yet
- HISTORY The Earliest Logic Gates Were MadeDocument2 pagesHISTORY The Earliest Logic Gates Were Madesterchie100% (5)
- ABB Distribution Transformer CatalogueDocument12 pagesABB Distribution Transformer CatalogueAbdan Shidqi100% (1)
- ECE539 Chapter 1 Vector CalculusDocument9 pagesECE539 Chapter 1 Vector Calculustabbara.ibrahim951No ratings yet
- Quiz 1 EE 472 For UNLVDocument4 pagesQuiz 1 EE 472 For UNLVistraight1No ratings yet
- Tutorial 3Document4 pagesTutorial 3NasreddineNo ratings yet
- Class 9Document13 pagesClass 9tneshoeNo ratings yet
- Benevolence Jimu (N0189512L) - Stochastic Modelling (Cin4120) - Assignment 2Document10 pagesBenevolence Jimu (N0189512L) - Stochastic Modelling (Cin4120) - Assignment 2Edwin MudzamiriNo ratings yet
- Test 4.1 Memo 2023Document4 pagesTest 4.1 Memo 2023chidochashe monalisaNo ratings yet
- Pres08 State-Feedback NewDocument33 pagesPres08 State-Feedback NewMahmudul HasanNo ratings yet
- Advanced and Multivariable Control February 14, 2020: Exercise 1Document3 pagesAdvanced and Multivariable Control February 14, 2020: Exercise 1Gianluca CastrinesiNo ratings yet
- UntitledDocument2 pagesUntitledYulexi Yajaira Pesantes ApoloNo ratings yet
- SolutionDocument13 pagesSolutionAngelo CompetenteNo ratings yet
- Worksheet Solution 4Document8 pagesWorksheet Solution 4abdelrahmanhelal13No ratings yet
- 2020 Nov PPR 2 Suggested Marking Guide by TrockersDocument29 pages2020 Nov PPR 2 Suggested Marking Guide by TrockersPriscaNo ratings yet
- Laurent Series, Residues, and The Residue Theorem: AE 5332 - Professor Dora E. MusielakDocument18 pagesLaurent Series, Residues, and The Residue Theorem: AE 5332 - Professor Dora E. MusielakJohn100% (1)
- DDP - Solution - JEE ADVANCED - Matrices & DeterminantsDocument10 pagesDDP - Solution - JEE ADVANCED - Matrices & DeterminantsBhoomika Singh SirohiNo ratings yet
- Testonememo 240308 101251Document7 pagesTestonememo 240308 101251leempyana11No ratings yet
- Tut 6 SolDocument9 pagesTut 6 Solsama abd elgelilNo ratings yet
- Filters SolutionsDocument10 pagesFilters SolutionsBaluku DavidNo ratings yet
- Tutorial 4 SolutionsDocument10 pagesTutorial 4 Solutionssama abd elgelilNo ratings yet
- 2024 TEST1 MemoDocument6 pages2024 TEST1 Memochidochashe monalisaNo ratings yet
- Bài Tập Ước Lượng C12346Document55 pagesBài Tập Ước Lượng C12346Nguyễn Viết DươngNo ratings yet
- How To Make A Homework (Part 2)Document2 pagesHow To Make A Homework (Part 2)Jad Abou ZeidNo ratings yet
- PumpDocument2 pagesPumpMuhammed ADNo ratings yet
- Giu 2429 58 8762 2022-10-15T15 57 58Document16 pagesGiu 2429 58 8762 2022-10-15T15 57 58yassen shalabyNo ratings yet
- Actividad 2 Bernal-GrandaDocument7 pagesActividad 2 Bernal-GrandaTeofilo GrandaNo ratings yet
- Examination Paper For TTT4120 Digital Signal Processing: Department of Electronic SystemsDocument7 pagesExamination Paper For TTT4120 Digital Signal Processing: Department of Electronic SystemsSr SeNo ratings yet
- 2020 Spring MESF5450 E04 PDFDocument5 pages2020 Spring MESF5450 E04 PDFLit Pao WongNo ratings yet
- Lecture 8 BackpropagationDocument28 pagesLecture 8 BackpropagationHodatama Karanna OneNo ratings yet
- Q4 - STEM - Basic Calculus - Week 8Document4 pagesQ4 - STEM - Basic Calculus - Week 8Jovelyn AvilaNo ratings yet
- The Exam Is Closed Book and Closed NotesDocument6 pagesThe Exam Is Closed Book and Closed NotesPengintaiNo ratings yet
- 1 Linearization: Linearization ForDocument2 pages1 Linearization: Linearization ForFahmi AlfaNo ratings yet
- Term 1 Test Maths Grade 12 MemoDocument6 pagesTerm 1 Test Maths Grade 12 Memotrevlynnaidoo08No ratings yet
- Load Flow - 3 - 2Document13 pagesLoad Flow - 3 - 2rauf2063036No ratings yet
- Chapter 7dDocument16 pagesChapter 7dSuman SamaiNo ratings yet
- Unit 1 State SpaceDocument15 pagesUnit 1 State SpacechriserldevNo ratings yet
- Finite Difference Method 2Document22 pagesFinite Difference Method 2badr amNo ratings yet
- Part1 Subset4 VIB Analysis of MDOF Discrete Systems #4MDOF Equations & Solution #5Eigenvalues&EigenvectorsDocument6 pagesPart1 Subset4 VIB Analysis of MDOF Discrete Systems #4MDOF Equations & Solution #5Eigenvalues&EigenvectorsFaze QadriNo ratings yet
- Soal KRKK NewDocument6 pagesSoal KRKK NewGita WulandariNo ratings yet
- Worksheet 1 AnswersDocument16 pagesWorksheet 1 AnswersziadNo ratings yet
- Math 4 - Sample QuestionDocument5 pagesMath 4 - Sample Questiondotbaba556No ratings yet
- Solution Session 4 E1 E2 Runoff Hydrograph TransformationDocument11 pagesSolution Session 4 E1 E2 Runoff Hydrograph TransformationTiên PhạmNo ratings yet
- Exam Solution: Zsin ( )Document2 pagesExam Solution: Zsin ( )uipohlklgfNo ratings yet
- Experiment-4: Pure Bending of Thin PlateDocument8 pagesExperiment-4: Pure Bending of Thin PlateRahul RoyNo ratings yet
- Calculus II 2020-2021 S1 Midterm 3Document4 pagesCalculus II 2020-2021 S1 Midterm 3Frank WanNo ratings yet
- Formula Sheet For Module 3Document2 pagesFormula Sheet For Module 3Akshat KumarNo ratings yet
- Problema 6-23 ShigleyDocument7 pagesProblema 6-23 ShigleylosdesquiciadosNo ratings yet
- DC1 1Document10 pagesDC1 1Utkarsh Singh MagarauthiyaNo ratings yet
- İTÜ FBE - UUM510E Computational Fluid Dynamics: 2020-2021 Spring Semester Project 3Document11 pagesİTÜ FBE - UUM510E Computational Fluid Dynamics: 2020-2021 Spring Semester Project 3Erkan ÜnNo ratings yet
- Finite Difference Methods For Two-Point Boundary Value Prob-LemsDocument3 pagesFinite Difference Methods For Two-Point Boundary Value Prob-LemsasasdNo ratings yet
- Lecture 01 - Review of FundamentalsDocument6 pagesLecture 01 - Review of FundamentalsCaden LeeNo ratings yet
- FIN 5309 Homework 9 Solution Fall 2018: InstructionsDocument16 pagesFIN 5309 Homework 9 Solution Fall 2018: InstructionsOntime BestwritersNo ratings yet
- Table-1: Microscopic Basic Transport Equations: 1. The Continuity EquationDocument11 pagesTable-1: Microscopic Basic Transport Equations: 1. The Continuity EquationABDUL RAFEYNo ratings yet
- Nama: Diach Rizky Syavitri NIM: 1611011120003 Mata Kuliah: Metode MatematikaDocument4 pagesNama: Diach Rizky Syavitri NIM: 1611011120003 Mata Kuliah: Metode MatematikaDiach RizkyNo ratings yet
- Dca2101 - Computer Oriented Numerical MethodsDocument9 pagesDca2101 - Computer Oriented Numerical Methodslucky chauhanNo ratings yet
- Probset 1 Answer KeyDocument5 pagesProbset 1 Answer KeyAnna Maria ParzueloNo ratings yet
- Correc TD V3Document5 pagesCorrec TD V3no NameNo ratings yet
- Statistical Mechanics (part-II)Document30 pagesStatistical Mechanics (part-II)Shadow GamingNo ratings yet
- Final 20 21iDocument9 pagesFinal 20 21ialikhalidd23No ratings yet
- Fourier TransformDocument19 pagesFourier TransformBasim Brohi100% (1)
- IC PhilosophyDocument2 pagesIC PhilosophySAMI UR REHMANNo ratings yet
- Ex1 Manual (Rev 2-3) PDFDocument10 pagesEx1 Manual (Rev 2-3) PDFreigetsu961009No ratings yet
- Olevia LT27HV LT30HV Service ManualDocument78 pagesOlevia LT27HV LT30HV Service Manualpw2009222No ratings yet
- Thermocouple Type T TableDocument0 pagesThermocouple Type T TableMark SloanNo ratings yet
- ITA2 User ManualDocument93 pagesITA2 User ManualHosni Ben KhimissaNo ratings yet
- 5SD74835 Datasheet enDocument4 pages5SD74835 Datasheet enSCACASFWDASNo ratings yet
- Avr Atmega 8 UcDocument14 pagesAvr Atmega 8 UcmalhiavtarsinghNo ratings yet
- Fa Catalog Sutrado KabelDocument78 pagesFa Catalog Sutrado KabelFatchur RochmanNo ratings yet
- KL3112 - 2-Channel Analog Input Terminal 0 20 MaDocument1 pageKL3112 - 2-Channel Analog Input Terminal 0 20 MaMahmoud Abd-Elhamid Abu EyadNo ratings yet
- Deep Sea Electronics PLC: DSE8660 Operator ManualDocument84 pagesDeep Sea Electronics PLC: DSE8660 Operator Manualjulio cesar navaNo ratings yet
- 7805 Voltage RegulatorDocument3 pages7805 Voltage RegulatorNishva MalikNo ratings yet
- NanoDocument38 pagesNanoPraveen KumarNo ratings yet
- Siemens NodeBDocument12 pagesSiemens NodeBpkjhaieteNo ratings yet
- InfinitumDocument5 pagesInfinitumk'DeGarsonNo ratings yet
- 08 Basic Processing Unit5Document38 pages08 Basic Processing Unit5Adheesh MaheshwariNo ratings yet
- Toyota Prius Hybrid Repair 2003Document20 pagesToyota Prius Hybrid Repair 2003Eric100% (63)
- Resistors in Parallel ConnectionDocument2 pagesResistors in Parallel ConnectionJessa Libo-onNo ratings yet
- Endress-Hauser Cerabar PMC71B VIDocument6 pagesEndress-Hauser Cerabar PMC71B VITang BvNo ratings yet
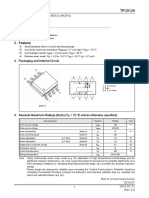
- TPC8129 Datasheet en 20140121 PDFDocument9 pagesTPC8129 Datasheet en 20140121 PDFCHARIS ZEVGARASNo ratings yet
- Huawei AntennaDocument364 pagesHuawei Antennagm230679% (14)
- Wearable AntennaDocument9 pagesWearable AntennaAzazelNo ratings yet
- HT64-132 系列流量计完工图Document14 pagesHT64-132 系列流量计完工图Kunpeng ZhouNo ratings yet
- En c7012 Uv Flame Detector Handbook 60 2398 Nl05r0896Document20 pagesEn c7012 Uv Flame Detector Handbook 60 2398 Nl05r0896mohamedNo ratings yet
- Data Sheet: TDA1387TDocument17 pagesData Sheet: TDA1387TNewUserNo ratings yet
- A Low-Cost HF Channel Simulator For Testing and Evaluating HF Digital SytemsDocument17 pagesA Low-Cost HF Channel Simulator For Testing and Evaluating HF Digital SytemsASM AAS ASSASNo ratings yet
- Handout 4 PDFDocument6 pagesHandout 4 PDFSamama ZafarNo ratings yet