Download as pdf or txt
You might also like
- CG Conventions For KuperDocument6 pagesCG Conventions For KuperPál HústalzNo ratings yet
- CNC 1Document14 pagesCNC 1Elena Ruxandra ZdrevitNo ratings yet
- UDT Commands in RhinoDocument34 pagesUDT Commands in RhinoJorge GuzmanNo ratings yet
- Lecture 8 Intro To CNCDocument23 pagesLecture 8 Intro To CNCAnand P DwivediNo ratings yet
- Jambient Spectral MorphDocument4 pagesJambient Spectral MorphMarcelo KraiserNo ratings yet
- 4Document11 pages4api-442192098No ratings yet
- Shape3d Design Trick TipDocument3 pagesShape3d Design Trick TipcockybundooNo ratings yet
- Assignment - 2 CNC Programming: Prof. R.O.VDocument11 pagesAssignment - 2 CNC Programming: Prof. R.O.VAnkit NandwaniNo ratings yet
- Additive Machines Milling MachineDocument5 pagesAdditive Machines Milling MachineFade FadeNo ratings yet
- PDF Manual290Document9 pagesPDF Manual290torbenNo ratings yet
- Total StationDocument15 pagesTotal StationDream zone EngineeringNo ratings yet
- 944-950 Manual With PartsDocument27 pages944-950 Manual With PartsGabeNo ratings yet
- A Conduit Bending Guide On How To Bend An OffsetDocument6 pagesA Conduit Bending Guide On How To Bend An OffsetedgarNo ratings yet
- Study On Tool Pre-Setter: Fig. 1. Different Offset For Different ToolsDocument5 pagesStudy On Tool Pre-Setter: Fig. 1. Different Offset For Different ToolsAnonymous 5AmJ13mLkNo ratings yet
- Rapid Hull Modeling in Rhinoceros - GerardDocument8 pagesRapid Hull Modeling in Rhinoceros - Gerardinder2655100% (1)
- PN8016 PDFDocument27 pagesPN8016 PDFrobinyNo ratings yet
- Steps of AlignmentDocument12 pagesSteps of AlignmentRupesh SinhaNo ratings yet
- Backlash ProgramDocument32 pagesBacklash ProgramCristopher Entena50% (2)
- G528 Pcs Lab (2011)Document4 pagesG528 Pcs Lab (2011)carlos pinillaNo ratings yet
- SAN15001geometry Cb34dcaDocument35 pagesSAN15001geometry Cb34dcaIsraelNo ratings yet
- Square Timer v3 PDFDocument30 pagesSquare Timer v3 PDFAM PM100% (1)
- Levelling Procedure: Spirit Level Tube LevelDocument5 pagesLevelling Procedure: Spirit Level Tube LevelMonika KshetriNo ratings yet
- Perspective in AutoCADDocument3 pagesPerspective in AutoCADRonald O.No ratings yet
- MarlinAutoCalibration Gcodes-2Document7 pagesMarlinAutoCalibration Gcodes-2Kyle ByrneNo ratings yet
- Codigos MOMDocument138 pagesCodigos MOMlucho0314No ratings yet
- Home My Youtube Channel About So Why I Like Arduino A Self-Balancing Robot - IIDocument11 pagesHome My Youtube Channel About So Why I Like Arduino A Self-Balancing Robot - IIfabitomNo ratings yet
- 1 Introduction To NURBSDocument133 pages1 Introduction To NURBSBala RanganathNo ratings yet
- Introduction To BalancingDocument16 pagesIntroduction To BalancingNguyễn Thanh SơnNo ratings yet
- Total Station and Angle MeasurementsDocument10 pagesTotal Station and Angle MeasurementsNikulast KidsNo ratings yet
- Arduino 6DOF Motion Platform LoResDocument13 pagesArduino 6DOF Motion Platform LoResOrlando Lara100% (1)
- Common Rafter FramingDocument11 pagesCommon Rafter FramingSilvia MassottoNo ratings yet
- Tambahan 1 Large Amplitude PendulumDocument6 pagesTambahan 1 Large Amplitude Pendulumkharisma73No ratings yet
- Survey Basics - Laying Out A Trench and LevellingDocument7 pagesSurvey Basics - Laying Out A Trench and LevellingDavid Connolly100% (9)
- GH Workshop Docs by UWDocument12 pagesGH Workshop Docs by UWHong MingNo ratings yet
- Index BalancingDocument22 pagesIndex BalancingShailesh Dalal100% (2)
- OpenCV Camera Calibration PipelineDocument12 pagesOpenCV Camera Calibration PipelineFormacros ZNo ratings yet
- Quaternion CompassDocument17 pagesQuaternion CompassZeR0 CountNo ratings yet
- Powermill Multi Axis MillingDocument16 pagesPowermill Multi Axis MillingVelichko Velikov100% (2)
- 3D Animation - NURBS - 1Document4 pages3D Animation - NURBS - 1sam rehmanNo ratings yet
- Dipstick Elevation StudiesDocument6 pagesDipstick Elevation StudiesGeorge CharitouNo ratings yet
- Cutter CompDocument3 pagesCutter CompJordan TranNo ratings yet
- Movimiento Armonico SimpleDocument6 pagesMovimiento Armonico SimpleFrancisco Manuel Ugarte PalacinNo ratings yet
- Intro To CNC For A Total NoviceDocument11 pagesIntro To CNC For A Total NoviceIshmael AliNo ratings yet
- Step by Step Guide To Dumpy Level SurveyDocument5 pagesStep by Step Guide To Dumpy Level Surveyandysupa100% (1)
- Making A Horizontal SundialDocument2 pagesMaking A Horizontal SundialDriftKingNo ratings yet
- SKF Single Plane Graphical Balancing Tutorial ENDocument13 pagesSKF Single Plane Graphical Balancing Tutorial ENVili KamenovaNo ratings yet
- Trackball - OpenGLDocument4 pagesTrackball - OpenGLdno256No ratings yet
- Creating Curved Stairs in RevitDocument13 pagesCreating Curved Stairs in RevitBobby100% (1)
- Cubic QTVR TutorialDocument4 pagesCubic QTVR TutorialTerry ArtsncraftsNo ratings yet
- Shoulder RolloverDocument1 pageShoulder Rolloverdashne134No ratings yet
- Bungee Jump Accel LQDocument5 pagesBungee Jump Accel LQReeja MathewNo ratings yet
- Reverse Dial AlignmentDocument7 pagesReverse Dial AlignmentPopescu CarmenNo ratings yet
- ROUNDTEST RA-2100 SERIES - Mitutoyo America CorporationDocument12 pagesROUNDTEST RA-2100 SERIES - Mitutoyo America CorporationMariangel Rodríguez Gómez100% (1)
- Gyroscopic EffectDocument13 pagesGyroscopic EffectRavinder SinghNo ratings yet
- CORNER TO CORNER CROCHET GUIDE: The essential C2C crochet guide to learn the skills and recent patterns to create stunning C2C projects from homeFrom EverandCORNER TO CORNER CROCHET GUIDE: The essential C2C crochet guide to learn the skills and recent patterns to create stunning C2C projects from homeNo ratings yet
- NX 9 for Beginners - Part 2 (Extrude and Revolve Features, Placed Features, and Patterned Geometry)From EverandNX 9 for Beginners - Part 2 (Extrude and Revolve Features, Placed Features, and Patterned Geometry)No ratings yet
- GTP Strategic Plan Proposal PDFDocument227 pagesGTP Strategic Plan Proposal PDFPak Ngah LebayNo ratings yet
- Trans-Amf Eng Man v44Document84 pagesTrans-Amf Eng Man v44AyeminThetNo ratings yet
- TherbligDocument23 pagesTherbligimrannila910No ratings yet
- 1.introduction To Health Education & Promotion (1) .Document44 pages1.introduction To Health Education & Promotion (1) .Nebiyu NegaNo ratings yet
- Cálculus - Areas and Tangents PDFDocument599 pagesCálculus - Areas and Tangents PDFCristhian Jhiovany PerezNo ratings yet
- JCB RepuestosDocument7 pagesJCB RepuestosPablo SaraNo ratings yet
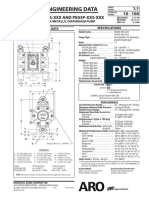
- Sales and Engineering Data: Pd03P-Xxs-Xxx and Pe03P-Xxs-Xxx 10 - 100 1:1Document4 pagesSales and Engineering Data: Pd03P-Xxs-Xxx and Pe03P-Xxs-Xxx 10 - 100 1:1jarosNo ratings yet
- AmanDocument10 pagesAmanAmanVatsNo ratings yet
- Q02-Chem - 1023 - Final - ExamDocument5 pagesQ02-Chem - 1023 - Final - ExamRodríguez Rito AméricaNo ratings yet
- Mathematics Standard Stage 6 Years 11 12 Scope Sequence Standard 2Document2 pagesMathematics Standard Stage 6 Years 11 12 Scope Sequence Standard 2The TrueTeamNo ratings yet
- Carbon Fiber Quasi-Isotropic LaminateDocument3 pagesCarbon Fiber Quasi-Isotropic LaminateGonçalo FonsecaNo ratings yet
- Presented By: Dingle Fernandes Neeraj PhadteDocument16 pagesPresented By: Dingle Fernandes Neeraj Phadteneeraj_phadteNo ratings yet
- Riemann HypothesisDocument55 pagesRiemann HypothesisMelciades FilhoNo ratings yet
- (Worksheet 13.1) - (Power Sharing)Document5 pages(Worksheet 13.1) - (Power Sharing)DeepikaNo ratings yet
- Norman v1 v2 v3 Version 02 Final Feb2009 PDFDocument99 pagesNorman v1 v2 v3 Version 02 Final Feb2009 PDFsiva sankarNo ratings yet
- HRM Dessler 08 Training and DevelopmentDocument52 pagesHRM Dessler 08 Training and DevelopmentQila Qils Ecky100% (6)
- Hyundai Kia VBL InteractiveDocument1 pageHyundai Kia VBL InteractiveMauricio Exequiel Chavez100% (4)
- Module One Wellness PlanDocument10 pagesModule One Wellness PlanMatthew JohnsonNo ratings yet
- 4 Conical Orifice PlateDocument41 pages4 Conical Orifice PlateAVULADODDI GIRI BABUNo ratings yet
- Asus ROG Zephyrus S GX531: 1.what Are The Main Characteristics?Document3 pagesAsus ROG Zephyrus S GX531: 1.what Are The Main Characteristics?mihaelahristeaNo ratings yet
- Passive Suppression of Nonlinear Panel Flutter Using Piezoelectric Materials With Resonant CircuitDocument12 pagesPassive Suppression of Nonlinear Panel Flutter Using Piezoelectric Materials With Resonant CircuitYonghui XUNo ratings yet
- Practice Test 26 A. Listening Section 1 Section One - Questions 1-12Document13 pagesPractice Test 26 A. Listening Section 1 Section One - Questions 1-12minhanh nguyễnNo ratings yet
- LEX1 Data SheetDocument2 pagesLEX1 Data Sheetpreetharajamma6025No ratings yet
- KSF V4.0 CastingDocument27 pagesKSF V4.0 CastingBobby WongNo ratings yet
- Isolve Sata: Product Features and BenefitsDocument2 pagesIsolve Sata: Product Features and BenefitsShah DhavalNo ratings yet
- Grade 7 10 Edukasyon Sa PagpapakataoDocument17 pagesGrade 7 10 Edukasyon Sa PagpapakataoMarinel CanicoNo ratings yet
- Conceptual FrameworkDocument20 pagesConceptual FrameworkWZ HakimNo ratings yet
- Group 1 - The Alkali Metals Worksheet: 4li(s) + O (G) 2li O(s)Document3 pagesGroup 1 - The Alkali Metals Worksheet: 4li(s) + O (G) 2li O(s)Vaida MatulevičiūtėNo ratings yet
- 2.2 Psychological PerspectiveDocument17 pages2.2 Psychological PerspectiveMaica LagareNo ratings yet
- Unit 4 Acquiring HostBased EvidenceDocument24 pagesUnit 4 Acquiring HostBased EvidenceBrain WasherNo ratings yet