Download as pdf or txt
You might also like
- Vectors Integral Topic AssessmentDocument6 pagesVectors Integral Topic AssessmentOrion BlaqueNo ratings yet
- Plates and Shells: Instructor's Solutions ManualDocument3 pagesPlates and Shells: Instructor's Solutions Manualehab elsawyNo ratings yet
- Impact of Jet Lab ReportDocument7 pagesImpact of Jet Lab ReportMohamad Hilmy HaririeNo ratings yet
- LAB REPORT RotameterDocument13 pagesLAB REPORT RotameterZareen Rashid Choudhury100% (1)
- Ship Motions in WavesDocument8 pagesShip Motions in WavesAnonymous e3ceN15No ratings yet
- Ship Motions in Regular WavesDocument20 pagesShip Motions in Regular WavesAnonymous e3ceN15No ratings yet
- Naval Architecture Equation Summary SheetDocument11 pagesNaval Architecture Equation Summary SheetAnonymous JSHUTpNo ratings yet
- FatigueDocument32 pagesFatigueMostaMostafaNo ratings yet
- Practice Test 6 Rotation Angular MomentumDocument18 pagesPractice Test 6 Rotation Angular MomentumLynn Hollenbeck BreindelNo ratings yet
- HO4 - Rigid Body Rotational Dynamics - 09!30!11Document26 pagesHO4 - Rigid Body Rotational Dynamics - 09!30!11bcapenerNo ratings yet
- On The Concept of Negative Damping: Workshop On "Mathematical Challenges and Modelling of Hydro Elasticity"Document24 pagesOn The Concept of Negative Damping: Workshop On "Mathematical Challenges and Modelling of Hydro Elasticity"Anonymous xcFcOgMiNo ratings yet
- Sr. No. Practical 1: Static and Dynamic Balancing of Rotating MassesDocument21 pagesSr. No. Practical 1: Static and Dynamic Balancing of Rotating MassesFa CaNo ratings yet
- 8 Buoyancy and Stability: 8.1 Archimedes PrincipleDocument15 pages8 Buoyancy and Stability: 8.1 Archimedes Principlesmith12245No ratings yet
- Dynamics and Simulation of Underwater Glide VehicleDocument3 pagesDynamics and Simulation of Underwater Glide VehicleMuhammad Yasar JavaidNo ratings yet
- Lec2 VIVDocument44 pagesLec2 VIVroulement_justeNo ratings yet
- Systematic Model Experiments On Flooding of Two Ro-Ro VesselsDocument18 pagesSystematic Model Experiments On Flooding of Two Ro-Ro Vesselsselvithimmarajan@gmail.comNo ratings yet
- 2016 Midterm Exam - SolutionDocument9 pages2016 Midterm Exam - Solution이태일No ratings yet
- Coupled Horizontal and Torsional Vibrations of Container ShipsDocument13 pagesCoupled Horizontal and Torsional Vibrations of Container ShipsJhonatan RosalesNo ratings yet
- Tension Leg and Deep Draft PlatformsDocument72 pagesTension Leg and Deep Draft Platformsusman nawaz100% (1)
- A Study On The Effectiveness of Active F PDFDocument6 pagesA Study On The Effectiveness of Active F PDFphantom29No ratings yet
- Mechanics L7Document49 pagesMechanics L7Charlie LaiNo ratings yet
- Small Angle Stability-Longi Compatibility ModeDocument18 pagesSmall Angle Stability-Longi Compatibility ModeMuhammad Adli Bin Ja'affarNo ratings yet
- Dynamics of Floating Bodies and Marine Vehicles: Day 8 Lecture Date 10 Aug 2007Document71 pagesDynamics of Floating Bodies and Marine Vehicles: Day 8 Lecture Date 10 Aug 2007Kirti BairathiNo ratings yet
- Sol Ch3 Calculation of Area, Volume, First and Second Moment UpdatedDocument23 pagesSol Ch3 Calculation of Area, Volume, First and Second Moment UpdatedsethuramanNo ratings yet
- Increase in Draught Due To List / HeelDocument24 pagesIncrease in Draught Due To List / Heelashwin.devaliya69230% (1)
- Dynamics: 1 !2007 by Roderic GrupenDocument11 pagesDynamics: 1 !2007 by Roderic GrupensircovalskyNo ratings yet
- Fundamental Notions of Viscous Fluid MechanicsDocument63 pagesFundamental Notions of Viscous Fluid Mechanicsbakri10101No ratings yet
- Experiment No.: 05 Name of The Experiment: Calibration of Rotameter ObjectivesDocument8 pagesExperiment No.: 05 Name of The Experiment: Calibration of Rotameter ObjectivesMd Afif AbrarNo ratings yet
- ConsolidationDocument66 pagesConsolidationEdDie Endra100% (2)
- Circular Motion: Pre-Reading: KJF 6.1 and 6.2Document19 pagesCircular Motion: Pre-Reading: KJF 6.1 and 6.2Dinesh KumarNo ratings yet
- Tutorial 1Document25 pagesTutorial 1Abraham ChalaNo ratings yet
- Ship Dynamics in Waves - RostokDocument51 pagesShip Dynamics in Waves - Rostokvivekt510No ratings yet
- 2 CL305 Viscosity Momentum TransportDocument53 pages2 CL305 Viscosity Momentum Transportshivurkolli07No ratings yet
- Water and Wastewater Treatment - Design ConceptsDocument12 pagesWater and Wastewater Treatment - Design ConceptsBlessings HaraNo ratings yet
- AN UPDATE ON THE DEVELOPMENT OF THE HULL VANE VfixedDocument11 pagesAN UPDATE ON THE DEVELOPMENT OF THE HULL VANE VfixedNafiri M KautsarNo ratings yet
- Stability: Curves of Stat. Stability Free Surface Effetcs TrimDocument5 pagesStability: Curves of Stat. Stability Free Surface Effetcs TrimDryanmNo ratings yet
- AE3010 Aerodynamics and Propulsion: Dr. Peter Barrington RV219 P.barrington@kingston - Ac.ukDocument55 pagesAE3010 Aerodynamics and Propulsion: Dr. Peter Barrington RV219 P.barrington@kingston - Ac.ukSabine BroschNo ratings yet
- Preliminary Trim and Stability BookletDocument13 pagesPreliminary Trim and Stability Bookletmdmk2937100% (4)
- Nonlinear PendulumDocument12 pagesNonlinear PendulumAmichai LevyNo ratings yet
- Shear Strength of SoilDocument46 pagesShear Strength of SoilGlyra Rosalem100% (1)
- Chapter3 Cog ShiftDocument56 pagesChapter3 Cog ShiftPalani KarthiNo ratings yet
- ENGI24859 - Module 2 - Kinematics of Angular MotionDocument45 pagesENGI24859 - Module 2 - Kinematics of Angular MotionNirav MachhiNo ratings yet
- Hydrostatic Forces On DamsDocument36 pagesHydrostatic Forces On DamsJohnri RamirezNo ratings yet
- Physics XI: Rotational MotionDocument14 pagesPhysics XI: Rotational MotionSarvesh DubeyNo ratings yet
- 3 - Curvilinear MotionDocument29 pages3 - Curvilinear Motion2022-205418No ratings yet
- Forced VibrationsDocument17 pagesForced Vibrationssuhas110No ratings yet
- Machine Problem Contents PDF FreeDocument23 pagesMachine Problem Contents PDF FreePedro Ian QuintanillaNo ratings yet
- Editable Engineering Problem StatementDocument7 pagesEditable Engineering Problem StatementtmamputsiNo ratings yet
- Matlab ReportDocument7 pagesMatlab ReportKerron DhorayNo ratings yet
- SHM VJSir 08Document74 pagesSHM VJSir 08Atharva WatekarNo ratings yet
- 2014 Midterm Exam SolutionDocument11 pages2014 Midterm Exam Solution이태일No ratings yet
- 1979-C.L。Kirk and E.UDocument11 pages1979-C.L。Kirk and E.UShuai MengNo ratings yet
- Kapal Cepat: Dr. Eng. Samuel, ST, MT Pertemuan IV: Kapal Planing Reff: Hydrodynamics of High-Speed Marine VehiclesDocument11 pagesKapal Cepat: Dr. Eng. Samuel, ST, MT Pertemuan IV: Kapal Planing Reff: Hydrodynamics of High-Speed Marine VehiclesChandra SibaraniNo ratings yet
- Chapter - 4 - Sediment - Transport in Open Channel (2022!02!26 02-47-24 UTC)Document13 pagesChapter - 4 - Sediment - Transport in Open Channel (2022!02!26 02-47-24 UTC)Sintayehu MengistuNo ratings yet
- Flywheel ExperimentDocument8 pagesFlywheel ExperimentSanil Khinchi100% (1)
- Unit 8: Mechanical Principles: Deadlines: Assignment One: 24Document44 pagesUnit 8: Mechanical Principles: Deadlines: Assignment One: 24Jo okNo ratings yet
- Fluid Mechanics 4Document3 pagesFluid Mechanics 4regmis150No ratings yet
- Boat Design - Stability FundementalsDocument12 pagesBoat Design - Stability Fundementalskjourf388No ratings yet
- Navigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsFrom EverandNavigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsNo ratings yet
- Applications of Derivatives Rate of Change (Calculus) Mathematics Question BankFrom EverandApplications of Derivatives Rate of Change (Calculus) Mathematics Question BankNo ratings yet
- Rotex Poly-Norm: Torsionally Flexible CouplingsDocument32 pagesRotex Poly-Norm: Torsionally Flexible CouplingsAlessandro OliveiraNo ratings yet
- 6 - Reactions at Supports and Connections For A Two Dimensional Structures - StaticsDocument11 pages6 - Reactions at Supports and Connections For A Two Dimensional Structures - StaticsPhamela Bienne CertezaNo ratings yet
- Edexcel PaperDocument28 pagesEdexcel PapervarayogiNo ratings yet
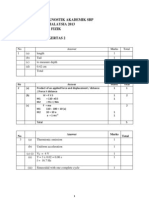
- Answer Trial SBP Physics SPM 2013 Paper 2Document9 pagesAnswer Trial SBP Physics SPM 2013 Paper 2Cikgu FaizalNo ratings yet
- PHYSICS 1 Summative ExamDocument4 pagesPHYSICS 1 Summative ExamLeizel MundoNo ratings yet
- Screw Compressors ReviewDocument19 pagesScrew Compressors ReviewCarlos Maldonado AlmeidaNo ratings yet
- Instrument Transformer: Electrical Measuring Instruments & Instrumentation 4 Semester Electrical EnggDocument63 pagesInstrument Transformer: Electrical Measuring Instruments & Instrumentation 4 Semester Electrical EnggMatt WrightNo ratings yet
- Transpo, Min, Rail, Traffic, PortsDocument57 pagesTranspo, Min, Rail, Traffic, PortsGraciella Angela NebresNo ratings yet
- Vectors CheckpointDocument2 pagesVectors CheckpointSyed ShabbirNo ratings yet
- GasHandlingManual K1Document57 pagesGasHandlingManual K1eeekkkggg100% (3)
- Examination 1 - Basic and Fundamental Concepts and PrinciplesDocument1 pageExamination 1 - Basic and Fundamental Concepts and PrinciplesYel AlvaroNo ratings yet
- PINN - The Neural Particle Method - An Updated Lagrangian Physics Informed Neural Network For Computational Fluid DynamicsDocument15 pagesPINN - The Neural Particle Method - An Updated Lagrangian Physics Informed Neural Network For Computational Fluid Dynamicsjulio.dutraNo ratings yet
- Measurement and Vectors: Key Concepts, Equations, and Problem Solving StrategiesDocument6 pagesMeasurement and Vectors: Key Concepts, Equations, and Problem Solving StrategiesKim SeungminNo ratings yet
- Concept of Latent Heat. BaseDocument18 pagesConcept of Latent Heat. BaseHarsh TripathiNo ratings yet
- Assignment 1 PDFDocument4 pagesAssignment 1 PDFAbdulHaseebArifNo ratings yet
- Chibesa Physics PDFDocument156 pagesChibesa Physics PDFMusanta Simmon SimzNo ratings yet
- Theories of LightDocument2 pagesTheories of Lightdela2100% (2)
- B - Entangled World - B - The Fascination of Quantum Information and Computation. Edited by Jürgen Audretsch. (ChemPhysChem, Vol. 7, Issue 12) (2006)Document1 pageB - Entangled World - B - The Fascination of Quantum Information and Computation. Edited by Jürgen Audretsch. (ChemPhysChem, Vol. 7, Issue 12) (2006)sepot24093No ratings yet
- Dual Nature of LightDocument15 pagesDual Nature of LightUriahs Victor75% (4)
- Second GradingDocument4 pagesSecond GradingBillones Rebalde MarnelleNo ratings yet
- Vector AnalysisDocument10 pagesVector AnalysisFlordeliza Santos MagalonaNo ratings yet
- Airflex® Technical Information: Section YDocument21 pagesAirflex® Technical Information: Section YArturo suzan arvizuNo ratings yet
- Optical FibreDocument49 pagesOptical FibreRavinder singhNo ratings yet
- Polarity of MoleculesDocument28 pagesPolarity of MoleculesJoseph GuerreroNo ratings yet
- 7) C1 Differentiation QuestionsDocument25 pages7) C1 Differentiation QuestionsAhmed NurulNo ratings yet
- Unit 2 IlluminationDocument56 pagesUnit 2 IlluminationsiddharthaNo ratings yet
- SOM - SF and BM FormulasDocument5 pagesSOM - SF and BM Formulasshreyas jadhav100% (1)
- Fourier NB PDFDocument12 pagesFourier NB PDFNehaNo ratings yet