Download as pdf or txt
You might also like
- Rexroth Analog Positioning ModeDocument12 pagesRexroth Analog Positioning ModehfvlNo ratings yet
- AWC708C LITE Motion Control User ManualDocument113 pagesAWC708C LITE Motion Control User Manualjhon rodriguezNo ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- Vericut HelpDocument1,085 pagesVericut Helpiresa_nuratNo ratings yet
- Minbooklist 136254Document156 pagesMinbooklist 136254МаратNo ratings yet
- Lab Activitiy 3 - For ESDocument8 pagesLab Activitiy 3 - For ESHiếu ShidoNo ratings yet
- Robotic Project GuidelinesDocument5 pagesRobotic Project GuidelinesKenneth HaradaNo ratings yet
- Release Notes - Ecomatcontroller AddendumDocument12 pagesRelease Notes - Ecomatcontroller AddendumedsonbdasilvajuniorNo ratings yet
- Vectrex Console - Complete Screen Calibration and More (Definitive Guide) - Matt's RepositoryDocument27 pagesVectrex Console - Complete Screen Calibration and More (Definitive Guide) - Matt's RepositoryAlbyNo ratings yet
- Lpc2148 Development BoardDocument59 pagesLpc2148 Development BoardAakash MakwanaNo ratings yet
- Loop There It IsDocument94 pagesLoop There It IsEthan BenoitNo ratings yet
- EE-Lab 8Document10 pagesEE-Lab 8Zain AhmedNo ratings yet
- Spark V ExpDocument5 pagesSpark V ExpyogeshNo ratings yet
- Lab8 2-Bit Binary Adder-SubtractorDocument11 pagesLab8 2-Bit Binary Adder-SubtractorAhmed Razi UllahNo ratings yet
- 3HAC027097-001 Rev - enDocument32 pages3HAC027097-001 Rev - enmanehrkornNo ratings yet
- Programas Biometricos de Seguridad PDFDocument794 pagesProgramas Biometricos de Seguridad PDFRei MenaNo ratings yet
- En - Omnicast Release Notes 4.7 SR1Document40 pagesEn - Omnicast Release Notes 4.7 SR1whatever1231No ratings yet
- NV Jetson Agx Xavier Developer Kit User GuideDocument23 pagesNV Jetson Agx Xavier Developer Kit User GuideLuboš ŘehounekNo ratings yet
- Department of Electrical Engineering: Ee-421: Digital Sysem DesignDocument20 pagesDepartment of Electrical Engineering: Ee-421: Digital Sysem DesignAhmed AliNo ratings yet
- Amw-Mc04 Ag Eng V20091120Document54 pagesAmw-Mc04 Ag Eng V20091120Mark Anthony AguinaldoNo ratings yet
- VEXiQ Assignement Bebe2023Document4 pagesVEXiQ Assignement Bebe2023Lamia Fateha meemNo ratings yet
- New DSD Manual Rvitm (4-7)Document72 pagesNew DSD Manual Rvitm (4-7)Spam SpamNo ratings yet
- Explain Array MultiplierDocument5 pagesExplain Array MultiplierMirNo ratings yet
- 01-13 Loopback Detection ConfigurationDocument11 pages01-13 Loopback Detection ConfigurationFrancescNo ratings yet
- Veex Tx130 - E+ E-Manual d07!00!038 Rev d00Document134 pagesVeex Tx130 - E+ E-Manual d07!00!038 Rev d00analogfireNo ratings yet
- Lfstbeb 845 XDocument60 pagesLfstbeb 845 XSaid DjaballahNo ratings yet
- Getting Started Manual - Labview LEGO MINDSTORMS NXT ModuleDocument8 pagesGetting Started Manual - Labview LEGO MINDSTORMS NXT ModuleDavid MorenoNo ratings yet
- Tekscan Flexiforce OEM Dev KitDocument9 pagesTekscan Flexiforce OEM Dev KitThành Hoàng NgọcNo ratings yet
- Lab8 2-Bit Binary Adder-SubtractorDocument5 pagesLab8 2-Bit Binary Adder-SubtractorMazoon ButtNo ratings yet
- Configure and Test A Stepper MotorDocument3 pagesConfigure and Test A Stepper MotorSubhasis BiswasNo ratings yet
- 9.3 Users GuideDocument43 pages9.3 Users GuideSonam PandeyNo ratings yet
- GV Control Center Quick Guide (CCSV34 QG B En)Document27 pagesGV Control Center Quick Guide (CCSV34 QG B En)ljubisaNo ratings yet
- Wheatstone Bridge Based Measurements With myDAQ and LabVIEW - Developer Zone - National InstrumentsDocument6 pagesWheatstone Bridge Based Measurements With myDAQ and LabVIEW - Developer Zone - National InstrumentsNishanth MenonNo ratings yet
- Instruction Manual: Remote Meter: MT50Document36 pagesInstruction Manual: Remote Meter: MT50Lizardo Astudillo CruzNo ratings yet
- Remote Control Units RET-Cassette: Actual P/N Previous P/N (Depending On The Tilt Range of The Antenna)Document7 pagesRemote Control Units RET-Cassette: Actual P/N Previous P/N (Depending On The Tilt Range of The Antenna)vivekNo ratings yet
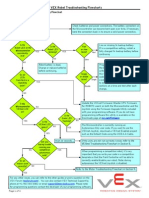
- Vex Robot Troubleshooting FlowchartDocument4 pagesVex Robot Troubleshooting FlowchartrdsrajNo ratings yet
- 3 1 1 A Vex InputsoutputsDocument12 pages3 1 1 A Vex Inputsoutputsapi-325609401No ratings yet
- Objectives: School of Engineering Grand Valley State UniversityDocument5 pagesObjectives: School of Engineering Grand Valley State UniversitymukulNo ratings yet
- Sensorboardguidevcnl 36826 SSBDocument4 pagesSensorboardguidevcnl 36826 SSBluis abrahamNo ratings yet
- DSC Neo Con ExacqDocument6 pagesDSC Neo Con ExacqFelipe LozanoNo ratings yet
- "Beef" Up Your Technological Resources Understanding (VEX V5)Document43 pages"Beef" Up Your Technological Resources Understanding (VEX V5)Érika Saavedra MonsalveNo ratings yet
- EDI-54V VW Indicator ManualDocument40 pagesEDI-54V VW Indicator ManualEmad HamdiyNo ratings yet
- Ezm v1.0.62 c1.9.61 Release Notes 20110217Document7 pagesEzm v1.0.62 c1.9.61 Release Notes 20110217Miguel MurilloNo ratings yet
- EsetaDocument7 pagesEsetaMiguel MurilloNo ratings yet
- Self Balancing Robot ProposalDocument8 pagesSelf Balancing Robot ProposalbhanuNo ratings yet
- Openvox A810E/Ae810E Base On Elastix User Manual: Date: 19/07/2011Document14 pagesOpenvox A810E/Ae810E Base On Elastix User Manual: Date: 19/07/2011Arash TorabiNo ratings yet
- Manual UX400 - 10GDocument209 pagesManual UX400 - 10GelyorkmasNo ratings yet
- 71000-901 A.4 Vertx Evo v1000 Inst Guide en PDFDocument25 pages71000-901 A.4 Vertx Evo v1000 Inst Guide en PDFPraveen Kumar K NNo ratings yet
- Section 5Document7 pagesSection 5Gurprit singhNo ratings yet
- Project 2 Computer ScienceDocument9 pagesProject 2 Computer SciencethedonutpirateNo ratings yet
- RXT1200 e Manual D07-00-087P RevA00Document67 pagesRXT1200 e Manual D07-00-087P RevA00roswind77No ratings yet
- HDL Manual 3 June 2022Document83 pagesHDL Manual 3 June 2022Ram Kumar SinghNo ratings yet
- EMC VNX VNX5200 Block Installation Guide PDFDocument65 pagesEMC VNX VNX5200 Block Installation Guide PDFsanju_81No ratings yet
- Freescale MPC55xx & MPC56xx Family On-Chip Emulation: Technical NotesDocument20 pagesFreescale MPC55xx & MPC56xx Family On-Chip Emulation: Technical NotesABDUL QADIRNo ratings yet
- 6.3.1.10 Packet Tracer - Exploring Internetworking Devices InstructionsDocument4 pages6.3.1.10 Packet Tracer - Exploring Internetworking Devices Instructionsslider1188100% (1)
- Wan Analyzer Card Pci T3/E3 Getting Started Guide: Omnianalysis PlatformDocument16 pagesWan Analyzer Card Pci T3/E3 Getting Started Guide: Omnianalysis PlatformcahesNo ratings yet
- Module IO SIXNETDocument32 pagesModule IO SIXNETqm204No ratings yet
- Data Acquisition Using Labview PDFDocument12 pagesData Acquisition Using Labview PDFengetarcioNo ratings yet
- Programming Microcontrollers with Python: Experience the Power of Embedded PythonFrom EverandProgramming Microcontrollers with Python: Experience the Power of Embedded PythonNo ratings yet
- Neo Geo Architecture: Architecture of Consoles: A Practical Analysis, #23From EverandNeo Geo Architecture: Architecture of Consoles: A Practical Analysis, #23No ratings yet
- Brochure Siemens Mobilett XP Digital Xray EBA AG2Document8 pagesBrochure Siemens Mobilett XP Digital Xray EBA AG2Alhasn AlmerabyNo ratings yet
- Decision Utah LighthouseDocument28 pagesDecision Utah LighthousemschwimmerNo ratings yet
- Connorm Edid6507-Assign 2Document27 pagesConnorm Edid6507-Assign 2api-399872156No ratings yet
- AnswersDocument24 pagesAnswersDeul ErNo ratings yet
- Fg20-35xt Parts Manual Engine and Ic Forklift (New Version 2015 and Up)Document132 pagesFg20-35xt Parts Manual Engine and Ic Forklift (New Version 2015 and Up)Chiko ArellanoNo ratings yet
- SLIM Sparse Linear Methods For Top-N Recommender SystemsDocument10 pagesSLIM Sparse Linear Methods For Top-N Recommender SystemsfcrkudxujdemptrdapNo ratings yet
- Intro To Molecular BioengineeringDocument12 pagesIntro To Molecular BioengineeringjoyeesufNo ratings yet
- Product Classification: SL110 Series Modular Jack, RJ45, Category 6, T568A/T568B, Unshielded, Without Dust Cover, BlackDocument2 pagesProduct Classification: SL110 Series Modular Jack, RJ45, Category 6, T568A/T568B, Unshielded, Without Dust Cover, BlackDWVIZCARRANo ratings yet
- July 2011 Jacksonville ReviewDocument36 pagesJuly 2011 Jacksonville ReviewThe Jacksonville ReviewNo ratings yet
- A Framework For Improving Advertising Creative Using Digital MeasurementDocument15 pagesA Framework For Improving Advertising Creative Using Digital MeasurementMs Mariia MykhailenkoNo ratings yet
- Dr. N.P SheteDocument28 pagesDr. N.P SheteMD Noyon IslamNo ratings yet
- Mazlan's Lecture MNE - Fire Fighting SystemDocument34 pagesMazlan's Lecture MNE - Fire Fighting SystemTuan JalaiNo ratings yet
- List of Holidays in Chandigarh University (CU) 2020Document2 pagesList of Holidays in Chandigarh University (CU) 2020Ālok KrNo ratings yet
- MLCC Model enDocument6 pagesMLCC Model enrahmanakberNo ratings yet
- Chapter 13 - Basic DerivativesDocument59 pagesChapter 13 - Basic Derivativesjelyn bermudezNo ratings yet
- DHL Strategy ModelDocument59 pagesDHL Strategy Modelfssankar100% (12)
- 3 If D⋅∇=∈∇.Eand∇.J = σ∇.Ein a given material, the material is said to beDocument3 pages3 If D⋅∇=∈∇.Eand∇.J = σ∇.Ein a given material, the material is said to besai kumar vemparalaNo ratings yet
- 001 2012 4 b-3Document114 pages001 2012 4 b-3dikahunguNo ratings yet
- CA ProjectDocument21 pagesCA Projectkalaswami100% (1)
- Competency Based LearningDocument9 pagesCompetency Based Learningkarapetyanines08No ratings yet
- HELIOSOFT Presentation Webinar EMEADocument24 pagesHELIOSOFT Presentation Webinar EMEASvetlana ChiganovaNo ratings yet
- The 2020 Lithium-Ion Battery Guide - The Easy DIY Guide To Building Your Own Battery Packs (Lithium Ion Battery Book Book 1)Document101 pagesThe 2020 Lithium-Ion Battery Guide - The Easy DIY Guide To Building Your Own Battery Packs (Lithium Ion Battery Book Book 1)Hangar Graus75% (4)
- FreemanWhite Hybrid Operating Room Design GuideDocument11 pagesFreemanWhite Hybrid Operating Room Design GuideFaisal KhanNo ratings yet
- Definition, Nature & Development of Tort Law-1Document40 pagesDefinition, Nature & Development of Tort Law-1Dhinesh Vijayaraj100% (1)
- Insta Grid Investors OpportunityDocument14 pagesInsta Grid Investors OpportunityShawn Paul BoikeNo ratings yet
- Module 3 Notes (1) - 1Document18 pagesModule 3 Notes (1) - 1PARZIVAL GAMINGNo ratings yet
- M Cecconi 2023 Intensive Care FundamentalsDocument278 pagesM Cecconi 2023 Intensive Care FundamentalsGustavo ParedesNo ratings yet
- How A GPU Works: Kayvon Fatahalian 15-462 (Fall 2011)Document87 pagesHow A GPU Works: Kayvon Fatahalian 15-462 (Fall 2011)Michaele ErmiasNo ratings yet