Download as pdf or txt
You might also like
- 025 - Devoicing of ApproximantsDocument3 pages025 - Devoicing of ApproximantsMartín Villagra100% (2)
- CH 6-GraphsDocument46 pagesCH 6-Graphssolaiamn hassanNo ratings yet
- How Do We Resolve Such Issue?Document28 pagesHow Do We Resolve Such Issue?Gi ChoiNo ratings yet
- Computer Graphics Lecture 3-2023Document15 pagesComputer Graphics Lecture 3-2023Alhassan YussifNo ratings yet
- Unit-2 - Representation of Curve and SurfacesDocument45 pagesUnit-2 - Representation of Curve and SurfacesSreehari Nambiar KTNo ratings yet
- 202003281454236324akankhas Yadav Computer GraphicsDocument9 pages202003281454236324akankhas Yadav Computer Graphicsparatevedant1403No ratings yet
- 10 BezierDocument19 pages10 Beziernoob free fire player plz helpNo ratings yet
- CSN-523: Computational Geometry: Lecture 19: Partitioning A Polygon Into Monotone Polygons (Polygon Partitioning)Document56 pagesCSN-523: Computational Geometry: Lecture 19: Partitioning A Polygon Into Monotone Polygons (Polygon Partitioning)saiavinash duddupudiNo ratings yet
- Computer Graphics Unit 3 NotesDocument23 pagesComputer Graphics Unit 3 NotesHarikarthikKumaraveluNo ratings yet
- Three Dimensional Object RepresentationDocument46 pagesThree Dimensional Object Representationfelipecarvalho.bio8427No ratings yet
- UNIT-4 3D Object Representations MethodsDocument6 pagesUNIT-4 3D Object Representations MethodsRajyalakshmi MNo ratings yet
- h03 Essential MathDocument13 pagesh03 Essential Mathakyadav123No ratings yet
- Homogeneous Coordinates and TransformationDocument30 pagesHomogeneous Coordinates and Transformationantonio oliveiraNo ratings yet
- Béziers Curve and B-SplinesDocument1 pageBéziers Curve and B-Splinesn02019697mNo ratings yet
- Three Dimensional RepresentationDocument33 pagesThree Dimensional RepresentationWafa ElgalhoudNo ratings yet
- Graph 032001Document16 pagesGraph 032001Hulk ManNo ratings yet
- Graphics 13Document86 pagesGraphics 13shabanaNo ratings yet
- Chapter 3Document15 pagesChapter 3naquibNo ratings yet
- MT131 Tutorial - 7 GraphsDocument55 pagesMT131 Tutorial - 7 Graphsamr alzaktaNo ratings yet
- Let Us Switch To A New Topic:: Graphs Graph TheoryDocument27 pagesLet Us Switch To A New Topic:: Graphs Graph TheoryAfiat Khan TahsinNo ratings yet
- Math 162A - Notes: Introduction and NotationDocument38 pagesMath 162A - Notes: Introduction and NotationNickNo ratings yet
- Topic 5 - Graph and Trees TheoryDocument92 pagesTopic 5 - Graph and Trees TheoryhawarieslabNo ratings yet
- Scheme of Work: Hrs Units Notes Examples ReferencesDocument17 pagesScheme of Work: Hrs Units Notes Examples ReferencesOluseye AkinNo ratings yet
- Lecture (3) : Surface Modeling: DR - Laith@uotechnology - Edu.iqDocument27 pagesLecture (3) : Surface Modeling: DR - Laith@uotechnology - Edu.iqraghunathreddyNo ratings yet
- CrystalStructure Handout2 1Document12 pagesCrystalStructure Handout2 1Ali hassanNo ratings yet
- Graph: Dr. Krishan Kumar Assistant Professor & Head Computer Science & EngineeringDocument102 pagesGraph: Dr. Krishan Kumar Assistant Professor & Head Computer Science & EngineeringHarkiratNo ratings yet
- Curve Representation 2. Parametric Curves 3. Non Parametric Curves 4. Cubic Splines 5. Bezier Curves 6. B-Spline CurvesDocument9 pagesCurve Representation 2. Parametric Curves 3. Non Parametric Curves 4. Cubic Splines 5. Bezier Curves 6. B-Spline CurvesSam SepiolNo ratings yet
- CGR Unit V INTRODUCTION TO CURVESDocument13 pagesCGR Unit V INTRODUCTION TO CURVESDhanshree GaikwadNo ratings yet
- V, V, ) Called Vertices: Points or Nodes) and Other Set E (EDocument15 pagesV, V, ) Called Vertices: Points or Nodes) and Other Set E (EErArpitaGuptaNo ratings yet
- Curves: Lecture Notes of Computer Graphics Prepared by DR - Eng. Ziyad Tariq Al-Ta'iDocument14 pagesCurves: Lecture Notes of Computer Graphics Prepared by DR - Eng. Ziyad Tariq Al-Ta'iDhahair A AbdullahNo ratings yet
- MAT051 Midterm To FinalDocument38 pagesMAT051 Midterm To FinalJulpae PirisNo ratings yet
- Graph TheoryDocument81 pagesGraph TheoryKavita Rahane100% (1)
- Matrix 3Document35 pagesMatrix 3SasikalaNo ratings yet
- ED536913Document16 pagesED536913shirleyyy.idoloNo ratings yet
- Curves and Surfaces: UNIT-4 By: Sandeep Kumar AP CSE DepartmentDocument44 pagesCurves and Surfaces: UNIT-4 By: Sandeep Kumar AP CSE DepartmentSandeep KumarNo ratings yet
- Bezier Curves and B-Splines, Blossoming: New York UniversityDocument8 pagesBezier Curves and B-Splines, Blossoming: New York UniversityBalbirNo ratings yet
- UPT Cours GTV2Document37 pagesUPT Cours GTV2orjetaNo ratings yet
- Limitations of Polygonal Meshes - Planar Facets - Fixed Resolution - Deformation Is DifficultDocument21 pagesLimitations of Polygonal Meshes - Planar Facets - Fixed Resolution - Deformation Is DifficultPriyanka GuptaNo ratings yet
- GraphsDocument13 pagesGraphsAbdul RehmanNo ratings yet
- Week 11 - GraphsDocument11 pagesWeek 11 - GraphsEmmanuel GuillermoNo ratings yet
- Notes 1136 UNIT II Lesson 7 Shuchita Graphics Ellipses & CurvesDocument11 pagesNotes 1136 UNIT II Lesson 7 Shuchita Graphics Ellipses & Curveskomalkaushik1212No ratings yet
- CSCE 3110 Data Structures & Algorithm Analysis: Rada Mihalcea Graphs (I) Reading: Chap.9, WeissDocument34 pagesCSCE 3110 Data Structures & Algorithm Analysis: Rada Mihalcea Graphs (I) Reading: Chap.9, WeissSreekesh RavindranNo ratings yet
- Graph TheoryDocument8 pagesGraph Theoryoliver1.shawNo ratings yet
- 09 Graphs (SF)Document85 pages09 Graphs (SF)tuantmse180360No ratings yet
- Graph TheoryDocument92 pagesGraph TheoryBalachanderKandasamy100% (2)
- DSA Unit-5Document227 pagesDSA Unit-5cht.aishikNo ratings yet
- Week 06: Graph Data Structures PDFDocument20 pagesWeek 06: Graph Data Structures PDFAnonymous Z9IoLzPNo ratings yet
- Graph AlgorithmsDocument82 pagesGraph AlgorithmsDharmendra KumarNo ratings yet
- 강의자료3 (1) Partial derivetives (Ch14.1~3) -2058815340 편집됨Document49 pages강의자료3 (1) Partial derivetives (Ch14.1~3) -2058815340 편집됨kwon486798No ratings yet
- Parametric CurveDocument28 pagesParametric Curveavi200894No ratings yet
- Algebra 2 - Journal - Quarter 1Document54 pagesAlgebra 2 - Journal - Quarter 1somaya bakrNo ratings yet
- Graphs: Massachusetts Institute of Technology 6.042J/18.062J, Fall '02 Professor Albert Meyer Dr. Radhika NagpalDocument17 pagesGraphs: Massachusetts Institute of Technology 6.042J/18.062J, Fall '02 Professor Albert Meyer Dr. Radhika Nagpalshobhit007No ratings yet
- Single Mathematics B: Vectors Summary Notes: Ruth GregoryDocument8 pagesSingle Mathematics B: Vectors Summary Notes: Ruth Gregorymuhammad awaisNo ratings yet
- Exercise On Wire Frame Modeling of Various Synthetic CurvesDocument22 pagesExercise On Wire Frame Modeling of Various Synthetic CurvesDivyesh Patel100% (1)
- MATLAB NotesDocument12 pagesMATLAB NotesEurnice GohNo ratings yet
- Project GFDocument24 pagesProject GFRuby CarolineNo ratings yet
- Relation and Graph Theory (Lecture Notes)Document12 pagesRelation and Graph Theory (Lecture Notes)YASH PRAJAPATINo ratings yet
- Math - 7th Grade Teaching NotesDocument16 pagesMath - 7th Grade Teaching NotesPara ParadiseNo ratings yet
- Chapter 5 One On A SlideDocument74 pagesChapter 5 One On A SlideEmmanuel NyantakyiNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- CST JSS 3 Examination QuestionDocument7 pagesCST JSS 3 Examination QuestionDauda KehindeNo ratings yet
- Grade 4 Revision TestsDocument11 pagesGrade 4 Revision TestsDarshana Kana100% (1)
- Formal Methods Roadmap PVS, ICS, and SALDocument28 pagesFormal Methods Roadmap PVS, ICS, and SALmmorsy1981No ratings yet
- Guide To Using The SAP Integration PlugDocument6 pagesGuide To Using The SAP Integration PlugloribeNo ratings yet
- SQLDocument7 pagesSQLvovope1174No ratings yet
- Enhanced Interior Gateway Routing Protocol: 10.0.0.0/16 What Route Is Best? What Route Is Best?Document28 pagesEnhanced Interior Gateway Routing Protocol: 10.0.0.0/16 What Route Is Best? What Route Is Best?Jack CordNo ratings yet
- M Business Communication 3rd Edition Rentz Solutions ManualDocument22 pagesM Business Communication 3rd Edition Rentz Solutions Manualpearlclement0hzi0100% (36)
- Ati Communication NR 341 PDFDocument3 pagesAti Communication NR 341 PDFmp1757No ratings yet
- Anti Hindu Buddhists of JavaDocument23 pagesAnti Hindu Buddhists of JavaUday DokrasNo ratings yet
- Weekend Homework Metu IntermediateDocument6 pagesWeekend Homework Metu Intermediatecfzgiuilf100% (1)
- Areas of Focus Staff Contacts enDocument1 pageAreas of Focus Staff Contacts enRjendra LamsalNo ratings yet
- Dark DexDocument274 pagesDark DexbulanmarepemetinNo ratings yet
- Hello !: Tim / Billy / Rosy / Miss JonesDocument4 pagesHello !: Tim / Billy / Rosy / Miss Jonesmaroua chtourouNo ratings yet
- Dictionary of Scripture and Ethics: Critical ReviewDocument3 pagesDictionary of Scripture and Ethics: Critical ReviewFrancisco Ramón ConcepciónNo ratings yet
- 1z 060Document213 pages1z 060mahendra.lal71373No ratings yet
- 1 - A LEVEL GRAMMAR-VOCAB 2 (7-15. Haftalar) Cevap AnahtarıDocument52 pages1 - A LEVEL GRAMMAR-VOCAB 2 (7-15. Haftalar) Cevap AnahtarıDierdreNo ratings yet
- Cybercom-Training 2023Document10 pagesCybercom-Training 2023adityaNo ratings yet
- Jones - 2000 - Real TimeDocument7 pagesJones - 2000 - Real TimeCristián AlvearNo ratings yet
- Fulfilling All RighteousnessDocument4 pagesFulfilling All RighteousnessBernadette Delizo CaasiNo ratings yet
- Pcie End Point (Ep) Uvm Vip: Block DiagramDocument2 pagesPcie End Point (Ep) Uvm Vip: Block DiagramMeghana VeggalamNo ratings yet
- Steph SpeechDocument2 pagesSteph Speechcharlene may dela cruzNo ratings yet
- Amazon RDS MigrationDocument350 pagesAmazon RDS MigrationAps PpsNo ratings yet
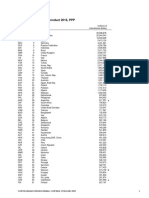
- Gross Domestic Product 2018, PPP: Ranking EconomyDocument4 pagesGross Domestic Product 2018, PPP: Ranking Economydory punisherNo ratings yet
- Visvesvaraya Technological University: Hotel Management SystemDocument29 pagesVisvesvaraya Technological University: Hotel Management SystemanoopssjchipliNo ratings yet
- Flash Player 32 0 Admin GuideDocument77 pagesFlash Player 32 0 Admin Guideณัฐวัชร ชิ้นไทยNo ratings yet
- 13 Comedy StructuresDocument13 pages13 Comedy Structuresrholzhauser01100% (6)
- CFE 101 - Prelim Exam (OBL) - 1stsem1 - Adrian Kurt M. Javier - BS Arch I-6 - 2275Document2 pagesCFE 101 - Prelim Exam (OBL) - 1stsem1 - Adrian Kurt M. Javier - BS Arch I-6 - 2275Adrian Kurt Melecio JavierNo ratings yet
- CCCU4007 Discovering and Expressing The Narrated SelfDocument2 pagesCCCU4007 Discovering and Expressing The Narrated SelfLau Wing ChanNo ratings yet
- The Language of Relations and FunctionsDocument13 pagesThe Language of Relations and FunctionsAvril Llagas100% (1)