Download as pdf or txt
You might also like
- Abridge Report - Autonomous Mobile Robots - 2023Document26 pagesAbridge Report - Autonomous Mobile Robots - 2023Kevin ParkerNo ratings yet
- Locomotion of A Tensegrity Robot Via Dynamically Coupled Modules by Rieffel, Stuk, Cuevas LipsonDocument3 pagesLocomotion of A Tensegrity Robot Via Dynamically Coupled Modules by Rieffel, Stuk, Cuevas LipsonTensegrity WikiNo ratings yet
- TSG RGDDocument31 pagesTSG RGDRuturaj JadhavNo ratings yet
- Mechanism and Machine Theory: К. Bissembayev, Zh. IskakovDocument18 pagesMechanism and Machine Theory: К. Bissembayev, Zh. IskakovDennis AlexanderNo ratings yet
- Compliant Folded Beam Suspension MechanismDocument18 pagesCompliant Folded Beam Suspension Mechanismomer elaminNo ratings yet
- Chebbi 16559Document28 pagesChebbi 16559acarrascotaberaNo ratings yet
- Stable Synchronization Ofmechanical System NetworksDocument23 pagesStable Synchronization Ofmechanical System NetworksRuben HernandezNo ratings yet
- Symmetry: Dynamic Behavior Analysis of A High-Rise Traction System With Tensioned Pulley Acting On Compensating RopeDocument26 pagesSymmetry: Dynamic Behavior Analysis of A High-Rise Traction System With Tensioned Pulley Acting On Compensating RopejayakumarNo ratings yet
- Kinematic and Static Analysis of A Three-Degree-Of-Freedom Spatial Modular Tensegrity MechanismDocument16 pagesKinematic and Static Analysis of A Three-Degree-Of-Freedom Spatial Modular Tensegrity MechanismAdrian NairdaNo ratings yet
- Article AMB First PNGDocument31 pagesArticle AMB First PNGFABIEN KENMOGNENo ratings yet
- International Journal of Engineering Science: Farooq M, Dao Bo WangDocument13 pagesInternational Journal of Engineering Science: Farooq M, Dao Bo Wangphyco1954No ratings yet
- JJS03Document33 pagesJJS03RomainNo ratings yet
- Dynamic Model of A Onelink Robot Manipulator With Both StructuraDocument6 pagesDynamic Model of A Onelink Robot Manipulator With Both StructurashivaNo ratings yet
- A Compliant Bistable Mechanism Design Incorporating Elastica Buckling Beam Theory and Pseudo-Rigid-Body ModelDocument14 pagesA Compliant Bistable Mechanism Design Incorporating Elastica Buckling Beam Theory and Pseudo-Rigid-Body ModelTrươngVănMếnNo ratings yet
- Ling 2016Document12 pagesLing 2016Ho Nhat LinhNo ratings yet
- Flexible Arm On ShaftDocument26 pagesFlexible Arm On ShaftCleves AxiomaNo ratings yet
- TIme-domain Numerical Continuation of Periodic Orbits For Harmonically Forced Hysteretic Nonlinear Systems With Iwan JointsDocument17 pagesTIme-domain Numerical Continuation of Periodic Orbits For Harmonically Forced Hysteretic Nonlinear Systems With Iwan JointsEunice StuartNo ratings yet
- Impedance Control of A Non-Linearly Coupled Tendon Driven ThumbDocument7 pagesImpedance Control of A Non-Linearly Coupled Tendon Driven Thumbern_43No ratings yet
- AndiDocument10 pagesAndiAdi DanNo ratings yet
- 2019 Goyal and Skelton - Tensegrity System Dynamics With Rigid Bars and Massive StringsDocument26 pages2019 Goyal and Skelton - Tensegrity System Dynamics With Rigid Bars and Massive StringsDaniel MartinsNo ratings yet
- Research On Co-Simulation of Rigid-Flexible Coupling System of Parallel RobotDocument6 pagesResearch On Co-Simulation of Rigid-Flexible Coupling System of Parallel RobotKamel FedaouiNo ratings yet
- Stability of Haptic Systems With Fractional Order ControllersDocument6 pagesStability of Haptic Systems With Fractional Order Controllerssuman sahaNo ratings yet
- Inverted PendulumDocument18 pagesInverted PendulumLingxi HuangNo ratings yet
- 01 CHAPTER 1 IntroductionDocument17 pages01 CHAPTER 1 IntroductionJerome XaviorNo ratings yet
- 1 s2.0 S1000936123000912 MainDocument21 pages1 s2.0 S1000936123000912 MainpachterNo ratings yet
- BaltaDocument18 pagesBaltaAmália EirezNo ratings yet
- A Novel Design of Planar High Compliance Joint in Variable S - 2022 - MechanismDocument17 pagesA Novel Design of Planar High Compliance Joint in Variable S - 2022 - MechanismOscar GomezNo ratings yet
- An Acceleration-Based State Observer For Robot Manipulators With Elastic JointsDocument7 pagesAn Acceleration-Based State Observer For Robot Manipulators With Elastic JointsJyotirekha PatiNo ratings yet
- Abbasnejad 2016Document18 pagesAbbasnejad 2016Yash MittalNo ratings yet
- ReportDocument7 pagesReportIyappan MNo ratings yet
- Developmentanddynamicmodellingofaflexure Based PDFDocument22 pagesDevelopmentanddynamicmodellingofaflexure Based PDFDenise NelsonNo ratings yet
- General Solution For The Dynamic Modeling of Parallel RobotsDocument17 pagesGeneral Solution For The Dynamic Modeling of Parallel RobotsHuynh TLoiNo ratings yet
- 4539 0 Cover Yun ICIADocument1 page4539 0 Cover Yun ICIAkadamsnNo ratings yet
- Experimental Characterization of Friction in A NegDocument17 pagesExperimental Characterization of Friction in A NegPietro TestaNo ratings yet
- 1 s2.0 S0094114X99000063 MainDocument26 pages1 s2.0 S0094114X99000063 MaintejacaNo ratings yet
- Preared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiDocument9 pagesPreared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiMuthoka VincentNo ratings yet
- (Sici) 1097-0207 (19970130) 40 2 357 Aid-Nme71 3.0.co 2-pDocument25 pages(Sici) 1097-0207 (19970130) 40 2 357 Aid-Nme71 3.0.co 2-pYouTube GuyNo ratings yet
- Jensen 2003Document8 pagesJensen 2003Anson KwanNo ratings yet
- A Roller Chain Drive Model Including Contact With Guide-BarsDocument18 pagesA Roller Chain Drive Model Including Contact With Guide-BarsPietroNo ratings yet
- ClosechainDocument15 pagesClosechainQuyết Nguyễn CôngNo ratings yet
- Mechanism (Engineering) - Wikipedia, The Free EncyclopediaDocument5 pagesMechanism (Engineering) - Wikipedia, The Free EncyclopedianidharshanNo ratings yet
- Research ArticleDocument10 pagesResearch Articleattiq ur RehmanNo ratings yet
- Workspace Boundaries of A Planar Tensegrity Mechanism by ArsenaultDocument17 pagesWorkspace Boundaries of A Planar Tensegrity Mechanism by ArsenaultTensegrity WikiNo ratings yet
- Contact Mechanics in Roller ChainDocument1 pageContact Mechanics in Roller Chainmaran.suguNo ratings yet
- Stiffness Metrics For Design of 3-RRR Flexible Manipulator: K.V.Varalakshmi, Dr.J.SrinivasDocument7 pagesStiffness Metrics For Design of 3-RRR Flexible Manipulator: K.V.Varalakshmi, Dr.J.SrinivasIJMERNo ratings yet
- A Control Engineers Quide To Sliding Mode ControlDocument14 pagesA Control Engineers Quide To Sliding Mode ControlyalllikNo ratings yet
- Modeling and Identification of A Single Link Flexible Arm With A Passive Gravity CompensationDocument7 pagesModeling and Identification of A Single Link Flexible Arm With A Passive Gravity CompensationHermogensNo ratings yet
- The International Journal of Engineering and Science (The IJES)Document5 pagesThe International Journal of Engineering and Science (The IJES)theijesNo ratings yet
- The Performance of One-Way Clutch in A Cam-Based Infinitely Variable TransmissionDocument15 pagesThe Performance of One-Way Clutch in A Cam-Based Infinitely Variable TransmissionOday IbraheemNo ratings yet
- Applied Non-Linear Dynamical Systems PDFDocument535 pagesApplied Non-Linear Dynamical Systems PDFNico Astroza100% (3)
- Articulo Teoría de Mecanismos y MáquinasDocument16 pagesArticulo Teoría de Mecanismos y MáquinaspruebaNo ratings yet
- A Roller Chain Drive Model Including Contact With Guide-BarsDocument18 pagesA Roller Chain Drive Model Including Contact With Guide-BarsTrúc LinhhNo ratings yet
- Composite Robust Control of A Laboratory Flexible ManipulatorDocument6 pagesComposite Robust Control of A Laboratory Flexible ManipulatorinfodotzNo ratings yet
- Binh2019 Article AnAdaptiveBacksteppingTrajectoDocument9 pagesBinh2019 Article AnAdaptiveBacksteppingTrajectoTeresaPeraltaCalvilloNo ratings yet
- Key Issues in Studying Parallel Manipulators 2011Document11 pagesKey Issues in Studying Parallel Manipulators 2011kpnskNo ratings yet
- Design and Analysis of A Compliant Parallel Pan-Tilt Platform 2015Document12 pagesDesign and Analysis of A Compliant Parallel Pan-Tilt Platform 2015newkid2202No ratings yet
- Articulo FisicaDocument12 pagesArticulo FisicaMarlon PerenguezNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
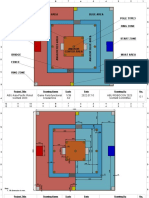
- Game Field ABU Robocon 2023Document9 pagesGame Field ABU Robocon 2023Rasyid YahyaNo ratings yet
- Classxiannualexaminationquestion201819 1Document55 pagesClassxiannualexaminationquestion201819 1heronand0% (1)
- Robotics HistoryDocument22 pagesRobotics HistoryAli HaiderNo ratings yet
- Hari Kumar V-NIT-W-ProfileDocument2 pagesHari Kumar V-NIT-W-ProfileMadhusudhan DNo ratings yet
- Codinng and Robotics ReportDocument3 pagesCodinng and Robotics ReportDali Kaphweleza MvulaNo ratings yet
- Ch1 - Types and Applications of RobotDocument35 pagesCh1 - Types and Applications of RobotcactuswillsaNo ratings yet
- 9695 Belt-Driven Colour Sorter100Document90 pages9695 Belt-Driven Colour Sorter100Sam Chumbas100% (1)
- Evolutionary RoboticsDocument10 pagesEvolutionary RoboticsThomas MeeusNo ratings yet
- Me (Cad)Document38 pagesMe (Cad)mecanodesignNo ratings yet
- AI Chapter1 NotesDocument9 pagesAI Chapter1 NotesAlwinaNo ratings yet
- RESOURCE 19 - The Ethical Dilemmas of RoboticsDocument7 pagesRESOURCE 19 - The Ethical Dilemmas of RoboticsCJ LosiñadaNo ratings yet
- RoboticsDocument53 pagesRoboticsWaseem QassabNo ratings yet
- PHD Research TopicsDocument7 pagesPHD Research TopicsRajuGangadharanNo ratings yet
- Module I Lecture 4Document14 pagesModule I Lecture 4Prateek NayakNo ratings yet
- KPMG Audit Technology Evolution Content Series: Machine LearningDocument4 pagesKPMG Audit Technology Evolution Content Series: Machine Learningrahulojha123No ratings yet
- Towards Dynamic Task/Posture Control of A 4DOF Humanoid Robotic ArmDocument6 pagesTowards Dynamic Task/Posture Control of A 4DOF Humanoid Robotic ArmmawadNo ratings yet
- Advanced Engineering Informatics: Review ArticleDocument18 pagesAdvanced Engineering Informatics: Review ArticleArabindcra BiswasNo ratings yet
- Statement of Purpose: (Distributed and Cognitive Robotics)Document2 pagesStatement of Purpose: (Distributed and Cognitive Robotics)Shafeeq EpNo ratings yet
- (Bionic Horizon) Mid-Term (1) WorksheetDocument4 pages(Bionic Horizon) Mid-Term (1) WorksheetAbdullah Mirza100% (1)
- Paper Presentation TopicsDocument3 pagesPaper Presentation TopicsRitu KadyanNo ratings yet
- Ir 4.0Document19 pagesIr 4.0Syaidatul MieraNo ratings yet
- IOT Based Arm RobotDocument6 pagesIOT Based Arm RobotIJRASETPublicationsNo ratings yet
- FANUC 200ib Robot DescriptionDocument5 pagesFANUC 200ib Robot DescriptionAnurag KesariNo ratings yet
- Lesson 2: Academic Texts Across The DisciplinesDocument21 pagesLesson 2: Academic Texts Across The DisciplinesHanna MendozaNo ratings yet
- Universal Manipulation InterfaceDocument18 pagesUniversal Manipulation Interfacejianrenwang.csNo ratings yet
- Soft Robotics An OverviewDocument7 pagesSoft Robotics An OverviewEditor IJTSRDNo ratings yet
- RoboticsDocument27 pagesRoboticsUsama SpiffyNo ratings yet
- Generic Resume TemplateDocument1 pageGeneric Resume Templatekalevaibhav436No ratings yet
- Do You Really Need Technology in Your LifeDocument1 pageDo You Really Need Technology in Your LifeJaubreyana Enriquez100% (2)