Download as pdf or txt
You might also like
- Perkins 1103 &1104 Series: Workshop Manual SpecificationsDocument42 pagesPerkins 1103 &1104 Series: Workshop Manual SpecificationsTASHKEEL100% (6)
- IT5409 Ch7 Part1 Object Detection v2Document97 pagesIT5409 Ch7 Part1 Object Detection v2Bui Minh DucNo ratings yet
- Pedestrian Detection - Kristina PicklDocument45 pagesPedestrian Detection - Kristina PicklZulkarnain ZainudinNo ratings yet
- Face Recognition Using FacenetDocument46 pagesFace Recognition Using Facenetvasavi collegeNo ratings yet
- 04 - Polygon RasterizationDocument35 pages04 - Polygon RasterizationswathiNo ratings yet
- Pattern RecognitionDocument52 pagesPattern RecognitionWaseem QassabNo ratings yet
- What Is Computer Vision?Document125 pagesWhat Is Computer Vision?Balaji NadipilliNo ratings yet
- SodaPDF-merged-Merging ResultDocument296 pagesSodaPDF-merged-Merging ResultShubham DhundaleNo ratings yet
- DIP Unit 1 (Intro, 2D - Sig+Sys, Convo, Transform)Document128 pagesDIP Unit 1 (Intro, 2D - Sig+Sys, Convo, Transform)Shubham DhundaleNo ratings yet
- FeaturesDocument60 pagesFeaturesfido knnNo ratings yet
- Learning in Artificial IntelligenceDocument6 pagesLearning in Artificial IntelligenceAnikNo ratings yet
- Feature Matching: "What Stuff in The Left Image Matches With Stuff On The Right?"Document62 pagesFeature Matching: "What Stuff in The Left Image Matches With Stuff On The Right?"Lim Yoong KangNo ratings yet
- 1 IntroductionDocument27 pages1 Introduction张子邺No ratings yet
- CH 8Document21 pagesCH 8zemenemisganew5No ratings yet
- Lect1 PDFDocument45 pagesLect1 PDFFatima Al-Qudah100% (1)
- Image Features and Categorization: Computer Vision Jia-Bin Huang, Virginia TechDocument70 pagesImage Features and Categorization: Computer Vision Jia-Bin Huang, Virginia TechDUDEKULA VIDYASAGARNo ratings yet
- Lect3 PDFDocument47 pagesLect3 PDFphysicsnewblolNo ratings yet
- Bag of FeatureDocument75 pagesBag of FeatureBudi PurnomoNo ratings yet
- 1 ObjectDetectionDocument46 pages1 ObjectDetectionShruthika S 21BLC1498No ratings yet
- Unit II - Chapter 4 - Feature DetectionDocument56 pagesUnit II - Chapter 4 - Feature Detection2033009mdcsNo ratings yet
- L02 ImagingPixelProcDocument53 pagesL02 ImagingPixelProctirumareddybhavyaNo ratings yet
- What Is Computer Vision?Document120 pagesWhat Is Computer Vision?4227AKSHA KHAIRMODENo ratings yet
- 05 - Spatial FilteringDocument70 pages05 - Spatial FilteringIzaan ShaikhNo ratings yet
- 13 PracticalMachineLearningDocument84 pages13 PracticalMachineLearningMatheus Silva100% (1)
- CVlecture 4Document62 pagesCVlecture 4David BNo ratings yet
- 1.1. Introduction To DIPDocument61 pages1.1. Introduction To DIPSANJIDA AKTERNo ratings yet
- Object Detection With Deformable Part-Based Models: Many Slides Based OnDocument32 pagesObject Detection With Deformable Part-Based Models: Many Slides Based OnJAGANNATHAN SNo ratings yet
- Corner Detector in Computer VisionDocument57 pagesCorner Detector in Computer Visionamir69018No ratings yet
- IP.03-Image Enhancement-b.Spatial FiltersDocument95 pagesIP.03-Image Enhancement-b.Spatial FiltersDũng Trần TiếnNo ratings yet
- Machine Learning IntroductionDocument56 pagesMachine Learning IntroductionSri Mukhesh ChowdaryNo ratings yet
- 09object Detection IDocument49 pages09object Detection ImohammadtestpiNo ratings yet
- Chapter 1Document58 pagesChapter 1musicstand29No ratings yet
- Lec 02 Cam ModelsDocument44 pagesLec 02 Cam ModelsBabil KingNo ratings yet
- DIP Lecture 02Document30 pagesDIP Lecture 02Khalid HasanNo ratings yet
- K-Nearest Neighbor Methods: William Cohen 10-601 April 2008Document35 pagesK-Nearest Neighbor Methods: William Cohen 10-601 April 2008Kimberley Rodriguez LopezNo ratings yet
- Vazquez ImageProcessFundamentalsDocument83 pagesVazquez ImageProcessFundamentalsnatchuvalliappan3No ratings yet
- 06 FeaturesDocument94 pages06 FeaturesmohammadtestpiNo ratings yet
- NN 09Document34 pagesNN 09youssef husseinNo ratings yet
- Exploring Augmented Reality With PythonDocument23 pagesExploring Augmented Reality With PythonIbrahim IsleemNo ratings yet
- Object RecognitionDocument30 pagesObject RecognitionMuhammad akmal qaisar S/O Abdul Baqi MS Student MCT PwrNo ratings yet
- CSE 473 Pattern Recognition: Instructor: Dr. Md. Monirul IslamDocument57 pagesCSE 473 Pattern Recognition: Instructor: Dr. Md. Monirul IslamNadia Anjum100% (1)
- Object DetectDocument27 pagesObject DetectFrancis MỹNo ratings yet
- Img Mod1 Session4 PDFDocument49 pagesImg Mod1 Session4 PDFharsha vardhanNo ratings yet
- Line Drawing: OutlineDocument9 pagesLine Drawing: OutlineAyushi ChaplotNo ratings yet
- Face RecognitionDocument16 pagesFace RecognitionHarshit AroraNo ratings yet
- Tuan 4 BlobDocument154 pagesTuan 4 Blobpham tamNo ratings yet
- Advances in Image Processing: By, Prof. Shruthi M. L. J. Asst. Prof. Dept. of TCE, CMRITDocument28 pagesAdvances in Image Processing: By, Prof. Shruthi M. L. J. Asst. Prof. Dept. of TCE, CMRITpreetik917No ratings yet
- Create Your Own CamScanner Using Python and OpenCVDocument20 pagesCreate Your Own CamScanner Using Python and OpenCVShirish GuptaNo ratings yet
- CH-6 DM ClusteringDocument28 pagesCH-6 DM Clusteringaddis alemayhuNo ratings yet
- Week 10Document50 pagesWeek 10adeelniaz1391No ratings yet
- Week-16 Lecture-32Document65 pagesWeek-16 Lecture-32Syed Hamza Ibrar ShahNo ratings yet
- Introduction To Robot Vision: Ziv Yaniv Computer Aided Interventions and Medical Robotics, Georgetown UniversityDocument28 pagesIntroduction To Robot Vision: Ziv Yaniv Computer Aided Interventions and Medical Robotics, Georgetown UniversityVishnu PriyanNo ratings yet
- K-Nearest Neighbor Methods: William Cohen 10-601 April 2008Document35 pagesK-Nearest Neighbor Methods: William Cohen 10-601 April 2008Ravi P HunachannavarNo ratings yet
- Bai05 HogDocument38 pagesBai05 Hog22520793No ratings yet
- 03 - ML4NLU-NeuralNetsDocument52 pages03 - ML4NLU-NeuralNetsredalert4ever4No ratings yet
- 3D Face Tracking and Reconstruction Using Modern C++ - Patrik Huber - CppCon 2015Document42 pages3D Face Tracking and Reconstruction Using Modern C++ - Patrik Huber - CppCon 2015Guillaume Vermeille SanchezNo ratings yet
- IT5409 Ch5 Segmentation v2Document64 pagesIT5409 Ch5 Segmentation v2nguyễn ĐứcNo ratings yet
- Computer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmDocument34 pagesComputer Vision: Spring 2006 15-385,-685 Instructor: S. Narasimhan Wean 5403 T-R 3:00pm - 4:20pmramnbantunNo ratings yet
- Deep Learning Nonlinear ControlDocument68 pagesDeep Learning Nonlinear ControlDaotao DaihocNo ratings yet
- Digitalimageforgerydetection 151101142154 Lva1 App6892Document25 pagesDigitalimageforgerydetection 151101142154 Lva1 App6892King UngNo ratings yet
- RO47002 - Course IntroductionDocument48 pagesRO47002 - Course IntroductionHaia Al SharifNo ratings yet
- RO47002 - Lecture 2B - ML Formalized - Part2Document8 pagesRO47002 - Lecture 2B - ML Formalized - Part2Haia Al SharifNo ratings yet
- RO47002 - Lecture 2C - Hyperparameters and Cross-ValidationDocument10 pagesRO47002 - Lecture 2C - Hyperparameters and Cross-ValidationHaia Al SharifNo ratings yet
- Calculus - Student Solutions Manual (8th Edition) PDFDocument1,079 pagesCalculus - Student Solutions Manual (8th Edition) PDFHaia Al SharifNo ratings yet
- Node-Based VS Layer-Based: Compositing SoftwareDocument4 pagesNode-Based VS Layer-Based: Compositing Softwaredak280No ratings yet
- Changes in Melon Plant Phytochemistry Impair AphisDocument13 pagesChanges in Melon Plant Phytochemistry Impair AphisADJALLANo ratings yet
- WSC1 ST Year NSQFFinalDocument187 pagesWSC1 ST Year NSQFFinalVadnala ArunNo ratings yet
- Articulo de Revision Unidad IIIDocument17 pagesArticulo de Revision Unidad IIIYeiru Azael RatmareNo ratings yet
- CyberAces Module1-Windows 1 InstallingWindowsDocument40 pagesCyberAces Module1-Windows 1 InstallingWindowsAbiodun AmusatNo ratings yet
- About Ansys: Finite Element AnalysisDocument2 pagesAbout Ansys: Finite Element Analysissuffiya abdulNo ratings yet
- Module 33: Data Layer Configuration: Siebel 8.0 EssentialsDocument24 pagesModule 33: Data Layer Configuration: Siebel 8.0 Essentialskomarovs33No ratings yet
- IEEE Conference LaTeX Template 1Document6 pagesIEEE Conference LaTeX Template 1Aditya RajNo ratings yet
- End Pore CatalogueDocument80 pagesEnd Pore CataloguedhdgdgdNo ratings yet
- Autodesk Robot Structural Analysis Professional 2012 Author: File: Structure2 (WITH LOADS) .RTD Address: Project: Structure2 (WITH LOADS)Document3 pagesAutodesk Robot Structural Analysis Professional 2012 Author: File: Structure2 (WITH LOADS) .RTD Address: Project: Structure2 (WITH LOADS)Joshue AdeleNo ratings yet
- How To... Select Multiple Values in A Dropdown BoxDocument15 pagesHow To... Select Multiple Values in A Dropdown Boxkalicharan13No ratings yet
- Encoder To Microprocessor Interface Chip Chips: Features: DescriptionDocument3 pagesEncoder To Microprocessor Interface Chip Chips: Features: DescriptionasdNo ratings yet
- Electroceramics Prof. Ashish Garg Department of Materials Science and Engineering Indian Institute of Technology, Kanpur Lecture - 32Document36 pagesElectroceramics Prof. Ashish Garg Department of Materials Science and Engineering Indian Institute of Technology, Kanpur Lecture - 32JATCNo ratings yet
- Assignment 7Document33 pagesAssignment 7Saksham SharmaNo ratings yet
- Mkna 1Document351 pagesMkna 1Sebastián MoyaNo ratings yet
- The Rhetorical Works of George of Trebizond and Their Debt To CiceroDocument11 pagesThe Rhetorical Works of George of Trebizond and Their Debt To CicerobrysonruNo ratings yet
- ALTO Professional Live 802Document36 pagesALTO Professional Live 802Charlie Dela RosaNo ratings yet
- FCE Reading & Use of English Guide: Exam Structure and Tasks Tips and ActivitiesDocument22 pagesFCE Reading & Use of English Guide: Exam Structure and Tasks Tips and ActivitieselisadpNo ratings yet
- LTE - RL40-CIQ - Netone (2-Mod 1)Document197 pagesLTE - RL40-CIQ - Netone (2-Mod 1)Boby SharifNo ratings yet
- Secant Piled Walls Dsign 160210011455Document54 pagesSecant Piled Walls Dsign 160210011455ariyarathne100% (4)
- Grout 214 TRDocument3 pagesGrout 214 TRbarouniamineNo ratings yet
- Content: Directory Structure in OSDocument15 pagesContent: Directory Structure in OSsara woldeyohannesNo ratings yet
- Tutorial Altera Cyclone BoardDocument4 pagesTutorial Altera Cyclone BoardskiziltoprakNo ratings yet
- Epiq Solutions SkylightDocument2 pagesEpiq Solutions Skylightmartinsalas924gmail.comNo ratings yet
- BCH 408 Problems 2Document3 pagesBCH 408 Problems 2tubosunolorunfemi3No ratings yet
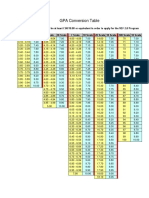
- VEF GPA Conversion TableDocument2 pagesVEF GPA Conversion TableMinh Khôi AnNo ratings yet
- Beams On Elastic Foundations TheoryDocument15 pagesBeams On Elastic Foundations TheoryCharl de Reuck100% (1)
- Features Descriptio: Lt3503 1A, 2.2Mhz Step-Down Switching Regulator in 2Mm × 3Mm DFNDocument20 pagesFeatures Descriptio: Lt3503 1A, 2.2Mhz Step-Down Switching Regulator in 2Mm × 3Mm DFNBrett HufnagleNo ratings yet
- Pipe Span ChartDocument1 pagePipe Span ChartazamshafiqNo ratings yet