Download as pdf or txt
You might also like
- CBMS4303 Management of Information SystemDocument12 pagesCBMS4303 Management of Information SystemM Adi0% (1)
- ESP32 Programming for the Internet of Things: JavaScript, AJAX, MQTT and WebSockets SolutionsFrom EverandESP32 Programming for the Internet of Things: JavaScript, AJAX, MQTT and WebSockets SolutionsRating: 5 out of 5 stars5/5 (2)
- Example of PSM1 ProposalDocument2 pagesExample of PSM1 Proposalayied sharumNo ratings yet
- ESU NT: Service ManualDocument58 pagesESU NT: Service ManualJonathan Flores Gutang100% (1)
- Syntec InfoDocument14 pagesSyntec InfoGeorgi HelyanNo ratings yet
- Credit Card Fra-WPS OfficeDocument47 pagesCredit Card Fra-WPS Officedeepakkewatkewat5No ratings yet
- Rohit File FormateDocument44 pagesRohit File Formatedeepakkewatkewat5No ratings yet
- Human Following Robot Using Arduino UnoDocument5 pagesHuman Following Robot Using Arduino Unopk rahimNo ratings yet
- Obstacle Avoiding Robot ReportDocument32 pagesObstacle Avoiding Robot ReportBro100% (1)
- Multipurpose Robotic ArmDocument7 pagesMultipurpose Robotic ArmIJRASETPublicationsNo ratings yet
- Pick and Place Arm Movement Control by AndroidDocument61 pagesPick and Place Arm Movement Control by Androidnagaraju75% (4)
- Yellow and Black Minimalist Business Letterhead-2Document21 pagesYellow and Black Minimalist Business Letterhead-2Simhadri MNo ratings yet
- A Project Report: 1.amarsinh Dhepe 2.rohit Gadhave 3.ashok ChavhanDocument26 pagesA Project Report: 1.amarsinh Dhepe 2.rohit Gadhave 3.ashok ChavhanG GoreNo ratings yet
- IoT Based Floor Cleaning RobotDocument6 pagesIoT Based Floor Cleaning RobotIJRASETPublicationsNo ratings yet
- AMP Microprojet Final 22Document19 pagesAMP Microprojet Final 22vvppolycoNo ratings yet
- 7th Sense Multipurpose RobotDocument50 pages7th Sense Multipurpose Robotashok3manjuNo ratings yet
- Foreign 2Document8 pagesForeign 2Rhodora A. BorjaNo ratings yet
- Automation of Floor Cleaning RobotDocument6 pagesAutomation of Floor Cleaning RobotIJRASETPublicationsNo ratings yet
- Abs 1Document31 pagesAbs 1sharon. thellaNo ratings yet
- PR3264 Obstacle Avoidance Robotic Vehicle Using Ultrasonic Sensor and Arduino Controller Jeevan M Ms. Parvathy Thampi M.s-Aug-2021Document35 pagesPR3264 Obstacle Avoidance Robotic Vehicle Using Ultrasonic Sensor and Arduino Controller Jeevan M Ms. Parvathy Thampi M.s-Aug-2021Aromal A AnilNo ratings yet
- Bluetooth Controlled CarDocument21 pagesBluetooth Controlled CarKondwaniNo ratings yet
- Beee Micro Project Line Follower - 5P4Document21 pagesBeee Micro Project Line Follower - 5P4farooqmd17032006No ratings yet
- LFR ReportDocument91 pagesLFR ReportRahul Salim NarayananNo ratings yet
- Es Report Final 4Document15 pagesEs Report Final 4radhaiartsNo ratings yet
- Project Obstactle AvoidDocument56 pagesProject Obstactle AvoidMahendra MistriNo ratings yet
- Arm ReportDocument28 pagesArm ReportPriyanshu SinghNo ratings yet
- UG Major Project - Wireless Bomb Detection RobotDocument79 pagesUG Major Project - Wireless Bomb Detection RobotAditya75% (8)
- Automated Domestic Vacuum Cleaner RobotDocument10 pagesAutomated Domestic Vacuum Cleaner RobotIJRASETPublicationsNo ratings yet
- 2116211601001-Intern ReportDocument30 pages2116211601001-Intern Reportniya enzieNo ratings yet
- HUMAN DocumentationDocument20 pagesHUMAN DocumentationJayanth ReddyNo ratings yet
- Automatic Domestic Vaccum CleanerDocument5 pagesAutomatic Domestic Vaccum CleanerIJRASETPublicationsNo ratings yet
- Automatic Pick and Place Robotic Arm Vehicle: IjarcceDocument3 pagesAutomatic Pick and Place Robotic Arm Vehicle: Ijarccebendali nadirNo ratings yet
- Obstacle Avoiding RobotDocument24 pagesObstacle Avoiding Robotmkafle101No ratings yet
- Review Paper On Industrial Pick Place Ro Fcf0f6a3Document3 pagesReview Paper On Industrial Pick Place Ro Fcf0f6a3vinayakdadagolNo ratings yet
- Motion DectectorDocument34 pagesMotion DectectorINDIAN ICONICNo ratings yet
- Laporan Projek Akhir POLITEKNIK (ELEKTRIK)Document86 pagesLaporan Projek Akhir POLITEKNIK (ELEKTRIK)saniy bin hj ahmad69% (13)
- 1 s2.0 S1877705812026847 Main PDFDocument7 pages1 s2.0 S1877705812026847 Main PDFBala MuraliNo ratings yet
- Final Year Project ReportDocument77 pagesFinal Year Project ReportUsama Waheed0% (1)
- Floor RobotDocument48 pagesFloor RobotTanvi gaikwadNo ratings yet
- Final ReportDocument28 pagesFinal ReportAmal RasheedNo ratings yet
- Report DKDocument40 pagesReport DKsp9488366No ratings yet
- Wireless Control of Pick and Place Robotic Arm Using An Android ApplicationDocument7 pagesWireless Control of Pick and Place Robotic Arm Using An Android ApplicationChandan Kumar SharmaNo ratings yet
- Wireless Mobile Robotic ArmDocument7 pagesWireless Mobile Robotic ArmUendel DiegoNo ratings yet
- Project 1 (Final Copy) CheckedDocument46 pagesProject 1 (Final Copy) CheckedBiswajit PaulNo ratings yet
- YASHWANTReport of ProjectDocument28 pagesYASHWANTReport of ProjectYashwant KushwahaNo ratings yet
- 2-1 MergedDocument23 pages2-1 Mergedvishalpawar050No ratings yet
- Obstacle Detection Robot Using 8051 Microcontroller: Palaparthi AbhijithDocument29 pagesObstacle Detection Robot Using 8051 Microcontroller: Palaparthi Abhijithrelangi jashwanthNo ratings yet
- IJRTI2304047Document4 pagesIJRTI2304047Himanshu KumarNo ratings yet
- Robotic WaiterDocument31 pagesRobotic WaiterSumitPrasadNo ratings yet
- Robotics KeerthanaDocument24 pagesRobotics Keerthanapk5178793No ratings yet
- Advanced Intelligent Vacuum Cleaner: Krutika Mankar, Sumeet Chincholkar, Preshit Mhatre, Varsha BholeDocument3 pagesAdvanced Intelligent Vacuum Cleaner: Krutika Mankar, Sumeet Chincholkar, Preshit Mhatre, Varsha BholeHALFGHOSTNo ratings yet
- COPPELIASIMDocument7 pagesCOPPELIASIMRooban SNo ratings yet
- Infrared Remote Control With A Social RobotDocument21 pagesInfrared Remote Control With A Social RobotJeevan HansdahNo ratings yet
- Synopsis Project Update 2Document6 pagesSynopsis Project Update 2Prakhar SrivastavaNo ratings yet
- Humanoid Robot Using Robotic ArmDocument7 pagesHumanoid Robot Using Robotic ArmIJRASETPublicationsNo ratings yet
- Line Following Robot ResearchDocument4 pagesLine Following Robot ResearchtherealslimNo ratings yet
- Design and Implementation of Robotic VehDocument4 pagesDesign and Implementation of Robotic VehKhan AyanNo ratings yet
- H.K.E Society's Poojya Doddappa Appa College of Engineering KALABURAGI - 585102Document22 pagesH.K.E Society's Poojya Doddappa Appa College of Engineering KALABURAGI - 585102balaji xeroxNo ratings yet
- Android Based Pick and Place Robot: International Journal of Informative & Futuristic ResearchDocument9 pagesAndroid Based Pick and Place Robot: International Journal of Informative & Futuristic ResearchShikha AnandNo ratings yet
- Pragmatic Internet of Everything (IOE) for Smart Cities: 360-Degree PerspectiveFrom EverandPragmatic Internet of Everything (IOE) for Smart Cities: 360-Degree PerspectiveNo ratings yet
- Engineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringFrom EverandEngineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringNo ratings yet
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]From EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Rating: 1 out of 5 stars1/5 (1)
- Database Assignment 03Document8 pagesDatabase Assignment 03nananaNo ratings yet
- From Source Code To OutputDocument4 pagesFrom Source Code To Outputapi-247871582No ratings yet
- Telnet Technical ModemDocument2 pagesTelnet Technical ModemHà MậpNo ratings yet
- Digital Control Strategy For Four Quadrant Operation of Three Phase BLDC Motor With Load VariationsDocument9 pagesDigital Control Strategy For Four Quadrant Operation of Three Phase BLDC Motor With Load VariationsGhada DahmoulNo ratings yet
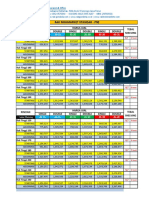
- Rak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingDocument6 pagesRak Minimarket Standar - P90: Single Double Single Double Single Double Rincian Harga Jual Tebal ShelvingAndi HadisaputraNo ratings yet
- ATmega 328 PDocument17 pagesATmega 328 PEduardo SantosNo ratings yet
- DGE OBD-II VBI Datasheet PDFDocument1 pageDGE OBD-II VBI Datasheet PDFJose Manuel Vargas AlvinoNo ratings yet
- Function Generator: SimpleDocument4 pagesFunction Generator: Simplebeto16f84No ratings yet
- Eaton 93pm Ups 30 250kva Datasheet Ps153029enDocument2 pagesEaton 93pm Ups 30 250kva Datasheet Ps153029enhoward LuNo ratings yet
- Non Deterministic AlgorithmsDocument16 pagesNon Deterministic AlgorithmsRyan CookNo ratings yet
- Dahua Technology DH nvr3216 Manual de UsuarioDocument4 pagesDahua Technology DH nvr3216 Manual de UsuarioLuis RiveraNo ratings yet
- 08 EIE - FinalDocument95 pages08 EIE - FinalrowmanNo ratings yet
- Using PATH VariableDocument14 pagesUsing PATH Variablemr z3iyaNo ratings yet
- Kalloo 2011Document18 pagesKalloo 2011Nhóm 10 tin họcNo ratings yet
- NSN-LTE Radio Network Planning GuidelineDocument94 pagesNSN-LTE Radio Network Planning GuidelineThủy NguyễnNo ratings yet
- HP Z800 Workstation 2x Intel Xeon X5620Document1 pageHP Z800 Workstation 2x Intel Xeon X5620Laurentiu GheorgheNo ratings yet
- Arrays & Strings Pactice Problems ClassDocument5 pagesArrays & Strings Pactice Problems ClassrakeshNo ratings yet
- Hafiz ResumeDocument3 pagesHafiz ResumeAnbazhagan PsNo ratings yet
- Hostel Warden CodesDocument74 pagesHostel Warden CodesgovardhanNo ratings yet
- Oceania Bh6530tw EngDocument73 pagesOceania Bh6530tw EngjasamnajNo ratings yet
- Fe Electrical and Computer Exam Preparation Planner PDFDocument39 pagesFe Electrical and Computer Exam Preparation Planner PDFSRA893No ratings yet
- CPM Question BankDocument2 pagesCPM Question BankBramodh JayanthiNo ratings yet
- BIGMat: A Distributed Affinity-Preserving Random Walk Strategy For Instance Matching On Knowledge GraphsDocument7 pagesBIGMat: A Distributed Affinity-Preserving Random Walk Strategy For Instance Matching On Knowledge Graphswajdi dhifliNo ratings yet
- Difference Between Explain Plan and Autotrace: %cpu TimeDocument2 pagesDifference Between Explain Plan and Autotrace: %cpu TimeDiwakar Reddy SNo ratings yet
- ReclosersDocument16 pagesRecloserslast730No ratings yet
- LQR Based Optimal Tuning of PID Controller For Tra PDFDocument11 pagesLQR Based Optimal Tuning of PID Controller For Tra PDFFrancisco A Torres VNo ratings yet
- FrontLine User GuideDocument60 pagesFrontLine User Guidesantosh shenoyNo ratings yet




























































![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)