Download as pdf or txt
You might also like
- Mixed-Integer Linear Programming and Constraint Programming Formulations For Solving Distributed Flexible Job Shop Scheduling ProblemDocument13 pagesMixed-Integer Linear Programming and Constraint Programming Formulations For Solving Distributed Flexible Job Shop Scheduling Problemlei liNo ratings yet
- LV Ph2020 - Bid Set - ArchitecturalDocument30 pagesLV Ph2020 - Bid Set - Architecturalart cafeNo ratings yet
- 8 Basics: An Introduction To FLAC 8 and A Guide To Its Practical Application in Geotechnical EngineeringDocument77 pages8 Basics: An Introduction To FLAC 8 and A Guide To Its Practical Application in Geotechnical EngineeringjeanNo ratings yet
- AS 1670.1-1995 Amdt 4-2001 Fire Detection, Warning, Control and Intercom Systems - System Design, Installation and ComDocument5 pagesAS 1670.1-1995 Amdt 4-2001 Fire Detection, Warning, Control and Intercom Systems - System Design, Installation and ComRobert SultanaNo ratings yet
- Florida Political Chronicle (Issue v.26 n.1 2018)Document104 pagesFlorida Political Chronicle (Issue v.26 n.1 2018)AlexNo ratings yet
- Combinatorial Optimization and Reasoning With Graph Neural NetworksDocument58 pagesCombinatorial Optimization and Reasoning With Graph Neural NetworksJhon Kennedy QueirozNo ratings yet
- Machine Learning For Combinatorial OptimizationDocument47 pagesMachine Learning For Combinatorial OptimizationsameerNo ratings yet
- Applying Graph Neural Networks To The Decision Ver 240324 001255Document14 pagesApplying Graph Neural Networks To The Decision Ver 240324 001255Jhon Kennedy QueirozNo ratings yet
- Dynamic Programming and Graph Algorithms in Computer VisionDocument20 pagesDynamic Programming and Graph Algorithms in Computer VisionsilentNo ratings yet
- Graph Attention-Based Deep Reinforcement Learning For Solving The Chinese Postman Problem With Load-Dependent CostsDocument17 pagesGraph Attention-Based Deep Reinforcement Learning For Solving The Chinese Postman Problem With Load-Dependent CostsmisgiyatiNo ratings yet
- Combining Reinforcement Learning and Constraint Programming For Combinatorial OptimizationDocument20 pagesCombining Reinforcement Learning and Constraint Programming For Combinatorial OptimizationLolo Cha9chou9No ratings yet
- CIM-2022-0136 Proof HiDocument14 pagesCIM-2022-0136 Proof Hi刘哲宁No ratings yet
- Deep Reinforcement Learning For MOODocument12 pagesDeep Reinforcement Learning For MOOnandaNo ratings yet
- Xingbaogao 2010Document12 pagesXingbaogao 2010ericksonyanambuNo ratings yet
- Combinatorial Optimization With Physics-Inspired Graph Neural NetworksDocument17 pagesCombinatorial Optimization With Physics-Inspired Graph Neural NetworksJhon Kennedy QueirozNo ratings yet
- Self-Directed Online Machine Learning For Topology OptimizationDocument35 pagesSelf-Directed Online Machine Learning For Topology OptimizationMeasurement SystemsNo ratings yet
- 05 (2020) Braso Taixe - Learning A Neural Solver For Multiple Object TrackingDocument11 pages05 (2020) Braso Taixe - Learning A Neural Solver For Multiple Object Trackingmat felNo ratings yet
- Challenges in Computational TopologyDocument20 pagesChallenges in Computational TopologyMohamed SolimanNo ratings yet
- DT MetalFormingKEM.926.3Document12 pagesDT MetalFormingKEM.926.3maragkoudakis.eceNo ratings yet
- An Evolutionary Multitasking Optimization Framework For Constrained Multiobjective Optimization ProblemsDocument15 pagesAn Evolutionary Multitasking Optimization Framework For Constrained Multiobjective Optimization ProblemsKarim EL BouyahyiouyNo ratings yet
- Graph Neural Architecture Search A SurveyDocument17 pagesGraph Neural Architecture Search A SurveyAli KhanNo ratings yet
- Nguyen Clusformer A Transformer Based Clustering Approach To Unsupervised Large-Scale Face CVPR 2021 PaperDocument10 pagesNguyen Clusformer A Transformer Based Clustering Approach To Unsupervised Large-Scale Face CVPR 2021 PaperVictor LöfgrenNo ratings yet
- Big Bang - Big Crunch Learning Method For Fuzzy Cognitive MapsDocument10 pagesBig Bang - Big Crunch Learning Method For Fuzzy Cognitive MapsenginyesilNo ratings yet
- Applsci 2411900 Peer Review v1Document16 pagesApplsci 2411900 Peer Review v1ramzi ayadiNo ratings yet
- Computers and Chemical Engineering: Akshay Ajagekar, Travis Humble, Fengqi YouDocument19 pagesComputers and Chemical Engineering: Akshay Ajagekar, Travis Humble, Fengqi YouDANTENo ratings yet
- Machine Learning For Cutting Planes in Integer Programming: A SurveyDocument9 pagesMachine Learning For Cutting Planes in Integer Programming: A SurveyBang Bang NgNo ratings yet
- Scalable Language Processing Algorithms For The Masses: A Case Study in Computing Word Co-Occurrence Matrices With MapreduceDocument10 pagesScalable Language Processing Algorithms For The Masses: A Case Study in Computing Word Co-Occurrence Matrices With MapreducemurduckNo ratings yet
- A Directed Genetic Algorithm For Global OptimizationDocument17 pagesA Directed Genetic Algorithm For Global OptimizationParth TrivediNo ratings yet
- Applsci 11 03175Document14 pagesApplsci 11 03175Olivia OeyNo ratings yet
- 4859-Article Text-9057-1-10-20210502Document6 pages4859-Article Text-9057-1-10-20210502Guru VelmathiNo ratings yet
- Mathematics: Solving Regression Problems With Intelligent Machine Learner For Engineering InformaticsDocument25 pagesMathematics: Solving Regression Problems With Intelligent Machine Learner For Engineering Informaticsleele wolfNo ratings yet
- Combinatorial Optimization by Graph Pointer Networks and Hierarchical Reinforcement LearningDocument8 pagesCombinatorial Optimization by Graph Pointer Networks and Hierarchical Reinforcement LearningSreekrishna DasNo ratings yet
- Discrete Fire y Algorithm: A New Metaheuristic Approach For Solving Constraint Satisfaction ProblemsDocument9 pagesDiscrete Fire y Algorithm: A New Metaheuristic Approach For Solving Constraint Satisfaction ProblemsI'm DuongNo ratings yet
- Computational Geometry: Exploring Geometric Insights for Computer VisionFrom EverandComputational Geometry: Exploring Geometric Insights for Computer VisionNo ratings yet
- A Comparison of Hole Filling MethodDocument19 pagesA Comparison of Hole Filling MethodDanielNo ratings yet
- A Multi-Action Deep Reinforcement Learning Framework For Flexible Job-Shop Scheduling ProblemDocument18 pagesA Multi-Action Deep Reinforcement Learning Framework For Flexible Job-Shop Scheduling Problem刘向阳No ratings yet
- Graph Structure From Point Clouds: Geometric Attention Is All You NeedDocument8 pagesGraph Structure From Point Clouds: Geometric Attention Is All You NeedHarold SelvaggiNo ratings yet
- Application of Data Mining in Multiobjective Optimization ProblemsDocument6 pagesApplication of Data Mining in Multiobjective Optimization ProblemsmabdulkadharNo ratings yet
- Walrus OptimizationDocument33 pagesWalrus OptimizationsrinivasNo ratings yet
- Approximation Algorithms For Process Systems - 2020 - Computers - Chemical EngiDocument15 pagesApproximation Algorithms For Process Systems - 2020 - Computers - Chemical EngiANGIE JIMENEZ BOHORQUEZNo ratings yet
- Cooperative Co-Evolution With Differential Grouping For Large Scale OptimizationDocument16 pagesCooperative Co-Evolution With Differential Grouping For Large Scale OptimizationserekNo ratings yet
- Art. 16Document12 pagesArt. 16juanjosemoracarrascal2No ratings yet
- A Mixed Integer Programming Model For A Double Row Layout ProblemDocument7 pagesA Mixed Integer Programming Model For A Double Row Layout Problem邢杰No ratings yet
- Sminton,+12327 Article+ (PDF) 28167 1 11 20210907Document29 pagesSminton,+12327 Article+ (PDF) 28167 1 11 20210907赵夏淼No ratings yet
- Genetic Algorithms, Function Optimization, and Facility Layout DesignDocument25 pagesGenetic Algorithms, Function Optimization, and Facility Layout DesignAlptekin TorunNo ratings yet
- Instance-Conditioned Adaptation For Large-Scale Generalization of Neural Combinatorial OptimizationDocument17 pagesInstance-Conditioned Adaptation For Large-Scale Generalization of Neural Combinatorial Optimizationwovogi6212No ratings yet
- Computing Graph Neural Networks: A Survey From Algorithms To AcceleratorsDocument38 pagesComputing Graph Neural Networks: A Survey From Algorithms To Acceleratorstung2303.gradNo ratings yet
- J Mechmachtheory 2018 11 013Document17 pagesJ Mechmachtheory 2018 11 013ranim najibNo ratings yet
- 2022 Emnlp-Demos 40Document10 pages2022 Emnlp-Demos 40Insaf KraidiaNo ratings yet
- A New Algorithm For Parallel Connected-Component Labelling On GpusDocument14 pagesA New Algorithm For Parallel Connected-Component Labelling On GpusMiguel Ramírez CarrilloNo ratings yet
- Algorithms 15 00377 v2Document27 pagesAlgorithms 15 00377 v2Khouloud EssassiNo ratings yet
- A Collaborative Benchmarking Framework For Multibody System DynamicsDocument9 pagesA Collaborative Benchmarking Framework For Multibody System DynamicsCesar HernandezNo ratings yet
- 23 Towards More Likely Models ForDocument9 pages23 Towards More Likely Models Forjoykiratsingh16No ratings yet
- An Introduction To Continuous Optimization For ImagingDocument159 pagesAn Introduction To Continuous Optimization For ImagingruiNo ratings yet
- A Simulated Annealing Code For General Integer Linear ProgramsDocument19 pagesA Simulated Annealing Code For General Integer Linear Programsmilos79No ratings yet
- Openmdao Overview 2019Document31 pagesOpenmdao Overview 2019Sreeja SunderNo ratings yet
- 6th Paper ConfDocument7 pages6th Paper Confvamsiff18No ratings yet
- Algorithms: Using Graph Embedding Techniques in Process-Oriented Case-Based ReasoningDocument25 pagesAlgorithms: Using Graph Embedding Techniques in Process-Oriented Case-Based ReasoningJaroensak YodkanthaNo ratings yet
- K Dim DCDocument16 pagesK Dim DCKedar KatabathulaNo ratings yet
- Multiprocessor Scheduling Using Particle Swarm OptDocument15 pagesMultiprocessor Scheduling Using Particle Swarm OptJoelNo ratings yet
- 基于深度强化学习的组合优化研究进展Document17 pages基于深度强化学习的组合优化研究进展LEI CHENNo ratings yet
- Qian 2015Document14 pagesQian 2015Fatima Zahraa GrineNo ratings yet
- M - O G N N C - A M D: Ixed Integer Ptimisation of Raph Eural Etworks FOR Omputer Ided Olecular EsignDocument27 pagesM - O G N N C - A M D: Ixed Integer Ptimisation of Raph Eural Etworks FOR Omputer Ided Olecular EsignstanleymeentNo ratings yet
- Applying Knowledge To Reverse Engineering Problems: Robert B. FisherDocument10 pagesApplying Knowledge To Reverse Engineering Problems: Robert B. Fisherparveenrathee123No ratings yet
- Combinatorial Optimization and Reasoning With Graph Neural NetworksDocument58 pagesCombinatorial Optimization and Reasoning With Graph Neural NetworksJhon Kennedy QueirozNo ratings yet
- Combinatorial Optimization With Physics-Inspired Graph Neural NetworksDocument17 pagesCombinatorial Optimization With Physics-Inspired Graph Neural NetworksJhon Kennedy QueirozNo ratings yet
- Inability of A Graph Neural Network Heuristic To Outperform Greedy Algorithms in Solving Combinatorial Optimization Problems Like Max-CutDocument2 pagesInability of A Graph Neural Network Heuristic To Outperform Greedy Algorithms in Solving Combinatorial Optimization Problems Like Max-CutJhon Kennedy QueirozNo ratings yet
- Trab 2Document9 pagesTrab 2Jhon Kennedy QueirozNo ratings yet
- Trab 4Document8 pagesTrab 4Jhon Kennedy QueirozNo ratings yet
- Trab 3Document16 pagesTrab 3Jhon Kennedy QueirozNo ratings yet
- Moyland Wood OverlordDocument1 pageMoyland Wood OverlordAlex SommervilleNo ratings yet
- Mcasals, RVM31103hDocument10 pagesMcasals, RVM31103hmaxisantiagoalbiNo ratings yet
- VT ReportDocument36 pagesVT ReportafNo ratings yet
- Perfect Picture SummaryDocument3 pagesPerfect Picture SummaryReiaNo ratings yet
- (PH D EL-Graduate-ProgramDocument2 pages(PH D EL-Graduate-ProgramRina Lorraine CagasNo ratings yet
- 9-12sept2020 DC Motor DONEDocument9 pages9-12sept2020 DC Motor DONEKaushik KunaleNo ratings yet
- (1997) in The Name of Society, or Three Thesis On The History of Social ThoughtDocument18 pages(1997) in The Name of Society, or Three Thesis On The History of Social Thoughtsashadam815812No ratings yet
- Pe3 Module No. 2 Dance Related InjuriesDocument7 pagesPe3 Module No. 2 Dance Related InjuriesGabo AlfonsoNo ratings yet
- The Source of Power: Product Design FeaturesDocument2 pagesThe Source of Power: Product Design FeaturesSahand ArasNo ratings yet
- The Path To An Exceptional Candidate ExperienceDocument7 pagesThe Path To An Exceptional Candidate ExperienceGeorgia BWNo ratings yet
- The Entrepreneurial Adventure: From Small Business To SME and BeyondDocument20 pagesThe Entrepreneurial Adventure: From Small Business To SME and BeyondCharlene KronstedtNo ratings yet
- Product - Guide - Bizhub 164 - vs1.0Document20 pagesProduct - Guide - Bizhub 164 - vs1.0vladimir2426No ratings yet
- PDF Adapted Physical Education National Standards Third Edition Kelly Ebook Full ChapterDocument53 pagesPDF Adapted Physical Education National Standards Third Edition Kelly Ebook Full Chapteranne.oconnor830100% (4)
- Teaching Reading Lesson Plan 1Document2 pagesTeaching Reading Lesson Plan 1api-301343173No ratings yet
- AP Honor List 2018Document2 pagesAP Honor List 2018Fauquier NowNo ratings yet
- Penerapan Kurikulum ThailandDocument26 pagesPenerapan Kurikulum ThailandRAAR GamingNo ratings yet
- Division of Northern Samar Curriculum Implementation Division (Cid)Document8 pagesDivision of Northern Samar Curriculum Implementation Division (Cid)gener r. rodelasNo ratings yet
- Logcat MainDocument21 pagesLogcat MainTrisno OchaNo ratings yet
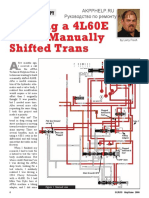
- 4l60e Manual Shift ConversionDocument10 pages4l60e Manual Shift ConversionSalvador PinedaNo ratings yet
- Lab REport Number Who Knows What (Mitosis)Document12 pagesLab REport Number Who Knows What (Mitosis)Michelle SeywaldNo ratings yet
- Literature Review On Alcohol Abuse in KenyaDocument5 pagesLiterature Review On Alcohol Abuse in Kenyagw0ttn7j100% (1)
- SAS Blank Monitoring Report 7Document16 pagesSAS Blank Monitoring Report 7Rodjan Moscoso100% (1)
- Annotated BibliographyDocument11 pagesAnnotated BibliographyTyler AyresNo ratings yet
- Organizational Culture ReviewDocument6 pagesOrganizational Culture ReviewLeafar VerdantNo ratings yet
- MY23 Sportage PHEV ENGDocument5 pagesMY23 Sportage PHEV ENGSteve MastropoleNo ratings yet
- 2021 PHC - Field Officers Manual - Final - 15.04.2021Document323 pages2021 PHC - Field Officers Manual - Final - 15.04.2021Enoch FavouredNo ratings yet