Download as docx, pdf, or txt
You might also like
- Microsoft IPO ProspectusDocument52 pagesMicrosoft IPO Prospectusjohnnyg31100% (1)
- FYP Project Proposal Report Solar System (Last) 18-12-2018Document28 pagesFYP Project Proposal Report Solar System (Last) 18-12-2018Madiha MaroofNo ratings yet
- Intel Research & Opinion PaperDocument13 pagesIntel Research & Opinion PaperTimothy McDonaldNo ratings yet
- Intel STP AnalysisDocument4 pagesIntel STP AnalysisTOSHIK SHRIMALI100% (1)
- Solar Tracking SystemDocument26 pagesSolar Tracking SystemKarthikeya XeroxNo ratings yet
- 5 PDFDocument3 pages5 PDFRaj DevNo ratings yet
- Dual Axis Solar Panel ComponentsDocument11 pagesDual Axis Solar Panel ComponentsRaj Kothari MNo ratings yet
- Solar TrackerDocument49 pagesSolar TrackerShYam MoHtaNo ratings yet
- Solar TrackerDocument50 pagesSolar TrackerzizoNo ratings yet
- Project: Solar Powered Induction Motor DriveDocument75 pagesProject: Solar Powered Induction Motor DriveDebanjan ChatterjeeNo ratings yet
- 33.nccip Rohit PDFDocument4 pages33.nccip Rohit PDFYasir BashirNo ratings yet
- Vaishali Paper (Finalized)Document4 pagesVaishali Paper (Finalized)soumiyaNo ratings yet
- Solar Grass Cutter MachDocument21 pagesSolar Grass Cutter MachAnonymous I13s99No ratings yet
- Solar Powered Water Pump: By: Utsav Naithani Abhishek Singh Priyanka YadavDocument21 pagesSolar Powered Water Pump: By: Utsav Naithani Abhishek Singh Priyanka YadavUtsav NaithaniNo ratings yet
- Design and Manufacture of Solar Panel Cleaning RobotDocument16 pagesDesign and Manufacture of Solar Panel Cleaning RobotPushpak PatilNo ratings yet
- A Control Strategy For An Autonomous Robotic Vacuum Cleaner For Solar PanelsDocument13 pagesA Control Strategy For An Autonomous Robotic Vacuum Cleaner For Solar PanelsPaul Vincent LauretaNo ratings yet
- Solar Panels Cleaning System ReportDocument26 pagesSolar Panels Cleaning System Reportpramo_dass0% (2)
- Bharath Fire Fighting RobotDocument43 pagesBharath Fire Fighting RobotDebojit DasNo ratings yet
- Water Level Controller-1Document32 pagesWater Level Controller-1Ramesh Kumar MalepatiNo ratings yet
- Project Title: Solar Panels Cleaning System: Senior Design Project ReportDocument34 pagesProject Title: Solar Panels Cleaning System: Senior Design Project Reportkeysp100% (1)
- Alternative Energy Monitoring SystemDocument11 pagesAlternative Energy Monitoring Systemgauravjoshi1992No ratings yet
- IOT Project Report: Solar Panel Monitoring SystemDocument13 pagesIOT Project Report: Solar Panel Monitoring SystemAnushka ShahNo ratings yet
- Synopsis For Solar Based Automatic Irrigation SystemDocument7 pagesSynopsis For Solar Based Automatic Irrigation SystemKhan Arshid Iqbal100% (2)
- Main Project Batch No 28.1Document90 pagesMain Project Batch No 28.1Best Dp's EverNo ratings yet
- Main Project Final YearDocument36 pagesMain Project Final Year5010- S SURYANo ratings yet
- Intelligent Solar Tracker System Implemented On 8051 MicrocontrollerDocument5 pagesIntelligent Solar Tracker System Implemented On 8051 MicrocontrollerseventhsensegroupNo ratings yet
- Automatic Solar Irrigation Pump Control System Based On Soil Moisture SensorDocument23 pagesAutomatic Solar Irrigation Pump Control System Based On Soil Moisture SensorSrinivas Reddy MandaNo ratings yet
- Reva705ijarseDocument9 pagesReva705ijarseARsNo ratings yet
- Indication of Brake Failure by Using IR SensorDocument3 pagesIndication of Brake Failure by Using IR SensormahendranNo ratings yet
- Final Solar ReportDocument13 pagesFinal Solar Reportاسعد الماوريNo ratings yet
- Automatic Solar Tracker With Dust Wiper Using PID ControllerDocument6 pagesAutomatic Solar Tracker With Dust Wiper Using PID ControllerEditor IJTSRD100% (1)
- 3.automated Transformer Coil Winding MachineDocument31 pages3.automated Transformer Coil Winding Machinecelphone533No ratings yet
- SDP 2 PresentationDocument22 pagesSDP 2 PresentationBaber AliNo ratings yet
- Design of A Solar Array Peak Power Tracking System: NASA1 Engineering, IncDocument27 pagesDesign of A Solar Array Peak Power Tracking System: NASA1 Engineering, IncalagurmNo ratings yet
- Final Synopsis of Minor Project SOLARDocument7 pagesFinal Synopsis of Minor Project SOLARKamalJeet Singh100% (3)
- Utilization of Solar Energy To Drive DC MotorDocument21 pagesUtilization of Solar Energy To Drive DC MotorSanthoshKumar MurruNo ratings yet
- Construction of Solar Panel.. PRINCEDocument29 pagesConstruction of Solar Panel.. PRINCEsergeantstaff597No ratings yet
- Overview of Speed Control of A DC Motor Using AndroidDocument41 pagesOverview of Speed Control of A DC Motor Using Androidmunzali surajoNo ratings yet
- Solar Panels Cleaning System PresentationDocument28 pagesSolar Panels Cleaning System PresentationAbidinNo ratings yet
- Industrial Protection Over Smoke Temperature and LDRDocument58 pagesIndustrial Protection Over Smoke Temperature and LDRPradeep Avanigadda100% (2)
- Speed Control of A 2HP DC MotorDocument25 pagesSpeed Control of A 2HP DC MotorEdul BrianNo ratings yet
- Sample Arduino PJT Document FormatDocument70 pagesSample Arduino PJT Document Format18E3457 MukundiniNo ratings yet
- Mems Controlled Intelligent Wheel ChairDocument87 pagesMems Controlled Intelligent Wheel ChairShaik Ashwaq JavedNo ratings yet
- Solar Charging SystemDocument3 pagesSolar Charging SystemHtwe Aung MyintNo ratings yet
- Arduino Project: Smart Irrigation SystemDocument13 pagesArduino Project: Smart Irrigation SystemAleeza AnjumNo ratings yet
- Off. No. 46, 1st Floor, Kadamba Complex Gamma-I, Greater Noida (India) - 201308 Contact UsDocument7 pagesOff. No. 46, 1st Floor, Kadamba Complex Gamma-I, Greater Noida (India) - 201308 Contact UsSawan AnandNo ratings yet
- Chapter One Smps InverterDocument10 pagesChapter One Smps Inverterolawale gbadeboNo ratings yet
- MPPT Using Sepic ConverterDocument109 pagesMPPT Using Sepic ConverterSandhya RevuriNo ratings yet
- VC 3Document28 pagesVC 3Reethika SNo ratings yet
- Solar 3Document19 pagesSolar 3Asif MuhammadNo ratings yet
- Chapter-1Document4 pagesChapter-1Bts ArmyNo ratings yet
- Automatic Water Level ControllerDocument21 pagesAutomatic Water Level ControllerBereket Abi MulugetaNo ratings yet
- Direct and Indirect Dual Axis Solar Tracking System With Weather ConditionDocument63 pagesDirect and Indirect Dual Axis Solar Tracking System With Weather ConditionRukminiNo ratings yet
- Abet Project PropossalDocument6 pagesAbet Project Propossalhkd12345No ratings yet
- Dual Axis Solar Tracking SystemDocument141 pagesDual Axis Solar Tracking SystemSadanandNo ratings yet
- Technical Paper PCEDocument6 pagesTechnical Paper PCERAJ SAROJNo ratings yet
- Design and Development of Solar Panel Cleaning SystemDocument4 pagesDesign and Development of Solar Panel Cleaning SystemMohammed safarulla HNo ratings yet
- Embedded System PaperDocument4 pagesEmbedded System PaperTiffany PriceNo ratings yet
- A Study of Solar Power Monitoring System Using Internet of Things (IOT)Document4 pagesA Study of Solar Power Monitoring System Using Internet of Things (IOT)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Solar Engineering Company PresentationDocument13 pagesSolar Engineering Company PresentationOlasunkanmi Quadri AbiodunNo ratings yet
- Assignment Theory 1Document7 pagesAssignment Theory 1San Lizas AirenNo ratings yet
- Ultra Low Power 3-Pin Voltage Surveillance With Time-Out: em Microelectronic-Marin SaDocument4 pagesUltra Low Power 3-Pin Voltage Surveillance With Time-Out: em Microelectronic-Marin SavetchboyNo ratings yet
- An Innovative Communication System For Deaf Dumb and Blind PeopleDocument49 pagesAn Innovative Communication System For Deaf Dumb and Blind PeopleHunter100% (1)
- CSO Lecture Notes 1-5 For SVVV StudentsDocument97 pagesCSO Lecture Notes 1-5 For SVVV Studentss. ShuklaNo ratings yet
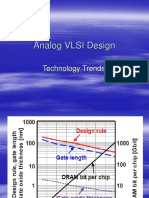
- Analog VLSI Design: Technology TrendsDocument31 pagesAnalog VLSI Design: Technology TrendsSathyaNarasimmanTiagarajNo ratings yet
- Microcontroller 8051Document42 pagesMicrocontroller 8051om18sahuNo ratings yet
- William Stallings Computer Organization and Architecture 7 Edition Computer Evolution and PerformanceDocument42 pagesWilliam Stallings Computer Organization and Architecture 7 Edition Computer Evolution and Performancebree789No ratings yet
- Generations of ComputerDocument21 pagesGenerations of ComputerLokesh Parashar0% (1)
- MP MC Unit 1Document125 pagesMP MC Unit 1M RahilNo ratings yet
- Case Studies - IEEEDocument4 pagesCase Studies - IEEEDaniel MendezNo ratings yet
- MPI - LAB - 6 (Spring - 2024)Document5 pagesMPI - LAB - 6 (Spring - 2024)Muhammad AbdullahNo ratings yet
- Electronics Engineering Group (EJ/DE/IE/IS) - 22636 - ETE - UO1a.1 Explain Processor Selection CriteriaDocument18 pagesElectronics Engineering Group (EJ/DE/IE/IS) - 22636 - ETE - UO1a.1 Explain Processor Selection CriteriaRaashidNo ratings yet
- Theory of Chapter 1 (Introduction To Microprocessor) and Chapter 2 (8085 Microprocessor) PDFDocument1 pageTheory of Chapter 1 (Introduction To Microprocessor) and Chapter 2 (8085 Microprocessor) PDFÊvîl ÂttïtùðeNo ratings yet
- MCQ 8051Document5 pagesMCQ 8051Krish ChakrabortyNo ratings yet
- Doc of Automatic Load Sharing of TransformersDocument136 pagesDoc of Automatic Load Sharing of TransformersVeda Komakula56% (9)
- Microprocessor Age 4 Bit Microprocessor 4004Document9 pagesMicroprocessor Age 4 Bit Microprocessor 4004fuad_randomNo ratings yet
- SWOT Analysis of AMD by Prajwal.P.RahangdaleDocument8 pagesSWOT Analysis of AMD by Prajwal.P.RahangdalePrajwal RahangdaleNo ratings yet
- Memory Interfacing With 8086Document10 pagesMemory Interfacing With 8086satyanarayana12100% (1)
- Hirschmann: Operator'S ManualDocument34 pagesHirschmann: Operator'S Manualjermaine tobanNo ratings yet
- Sony Japan - Essay Form - Internship - FY23Document2 pagesSony Japan - Essay Form - Internship - FY23Mayank VibhutiNo ratings yet
- Unit 1: Microprocessors and Microcontroller.: The 8051 Architecture: Introduction, Architecture of 8051Document44 pagesUnit 1: Microprocessors and Microcontroller.: The 8051 Architecture: Introduction, Architecture of 8051ashwinishettytpNo ratings yet
- Rich Golden Shower Montessori Center Senior High School Department SY 2020-2021Document5 pagesRich Golden Shower Montessori Center Senior High School Department SY 2020-2021Aizel Nova Fermilan ArañezNo ratings yet
- BOOK 'Guide' Business Computer Applications - 12!12!16Document274 pagesBOOK 'Guide' Business Computer Applications - 12!12!16HIEZEL BAYUGNo ratings yet
- IPS - High Level Programming of Small SystemsDocument120 pagesIPS - High Level Programming of Small SystemsTom MaynardNo ratings yet
- Computer Architecture From Microprocessors To Supercomputers The Oxford Series in Electrical and Computer Engineering PDF-1Document3 pagesComputer Architecture From Microprocessors To Supercomputers The Oxford Series in Electrical and Computer Engineering PDF-1kartikNo ratings yet
- DDI0388G Cortex A9 r3p0 TRMDocument214 pagesDDI0388G Cortex A9 r3p0 TRMAlessandro Holanda MachadoNo ratings yet
- Rift Valley Institute of Science and Technology-RvistDocument50 pagesRift Valley Institute of Science and Technology-RvistEuthecas KipkiruiNo ratings yet