
Huyett 2020 Robust PID Controller
Huyett 2020 Robust PID Controller
You might also like
- 1000-MCQS - PROSTHODONTICS-DEFINITIVE Answers PDFDocument43 pages1000-MCQS - PROSTHODONTICS-DEFINITIVE Answers PDFAnshuman Mohanty88% (17)
- Medical TattooingDocument66 pagesMedical TattooingTattooTattoo100% (4)
- BMEN4110 Lab1 PartA Artificial Pancreas 2021Document15 pagesBMEN4110 Lab1 PartA Artificial Pancreas 2021William GoldbergNo ratings yet
- Dia 2017 2525 AbstractsDocument134 pagesDia 2017 2525 AbstractsPranav Kumar Prabhakar100% (1)
- Arquivos Brasileiros de Endocrinologia & MetabologiaDocument6 pagesArquivos Brasileiros de Endocrinologia & MetabologiaThenmozhi KaranNo ratings yet
- Biomedical Signal Processing and Control: Iftikhar Ahmad, Faysal Munir, Muhammad Faizan MunirDocument8 pagesBiomedical Signal Processing and Control: Iftikhar Ahmad, Faysal Munir, Muhammad Faizan MunirBrasoveanu GheorghitaNo ratings yet
- A VHDL Implementation of The Biostator IIDocument5 pagesA VHDL Implementation of The Biostator IImuhammad syafiqNo ratings yet
- 125 2021 Article 5391Document9 pages125 2021 Article 5391Raluca CrinaNo ratings yet
- Subcutaneous Insulin Administration: Sufficient Progress or Ongoing Need?Document5 pagesSubcutaneous Insulin Administration: Sufficient Progress or Ongoing Need?Marcelo GomesNo ratings yet
- Simulating Human DigestionDocument35 pagesSimulating Human DigestionLIBARDO CASTAÑEDA FLOREZNo ratings yet
- A Fuzzy Controller For Blood Glucose-Insulin SysteDocument7 pagesA Fuzzy Controller For Blood Glucose-Insulin SysteBrasoveanu Gheorghita100% (1)
- Artificial Pancreas - RAEE 2017 PDFDocument6 pagesArtificial Pancreas - RAEE 2017 PDFZeeshanNo ratings yet
- Real Time Blood Sugar Monitoring: July 2017Document6 pagesReal Time Blood Sugar Monitoring: July 2017Khansa FadelseedNo ratings yet
- Insulin Pump ProjectDocument15 pagesInsulin Pump ProjectAndrei Deac100% (1)
- Closed Loop System Design For Wireless ArtificialDocument6 pagesClosed Loop System Design For Wireless ArtificialAmmar KhanNo ratings yet
- Bhattacharjee 2018Document12 pagesBhattacharjee 2018Brasoveanu GheorghitaNo ratings yet
- Artificial Pancreas Technology Offers Hope For Childhood DiabetesDocument11 pagesArtificial Pancreas Technology Offers Hope For Childhood DiabetesDiana PeñalozaNo ratings yet
- Student Member, IEEE, Kei Ikeda, Student Member, IEEE, Yudai Ogawa, Hiroyuki KaiDocument11 pagesStudent Member, IEEE, Kei Ikeda, Student Member, IEEE, Yudai Ogawa, Hiroyuki KaikalaiyarasiNo ratings yet
- Comparison Between PID-Fuzzy and Numerical Methods Based On Linear Algebra Controllers For Glucose Control in Type 1 Diabetes TreatmentDocument7 pagesComparison Between PID-Fuzzy and Numerical Methods Based On Linear Algebra Controllers For Glucose Control in Type 1 Diabetes Treatmentkaveendra.rcitNo ratings yet
- Prescription Updater For Victims With HyperglycemiaDocument4 pagesPrescription Updater For Victims With HyperglycemiaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Artificial Intelligence en DMDocument1 pageArtificial Intelligence en DMdadelapoNo ratings yet
- 856designing of Insulin Pump PDFDocument3 pages856designing of Insulin Pump PDFmaddyNo ratings yet
- Gilligan1994 PDFDocument6 pagesGilligan1994 PDF吳昇晃No ratings yet
- Design and Development of A Simulating Prototype Cost Effective Insulin Management SystemDocument3 pagesDesign and Development of A Simulating Prototype Cost Effective Insulin Management SystemRazan AlyahyaNo ratings yet
- Capabilities of Next-Generation Patch Pump: Improved Precision, Instant Occlusion Detection, and Dual-Hormone TherapyDocument6 pagesCapabilities of Next-Generation Patch Pump: Improved Precision, Instant Occlusion Detection, and Dual-Hormone TherapyMarcelo GomesNo ratings yet
- Sensors 21 07117Document25 pagesSensors 21 07117fhamdiNo ratings yet
- Proteomic Analysis of Human Plasma During Intermittent FastingDocument13 pagesProteomic Analysis of Human Plasma During Intermittent FastingioanalupumNo ratings yet
- Blood Glucose Regulation in Diabetics Using Sliding Mode Control TechniquesDocument14 pagesBlood Glucose Regulation in Diabetics Using Sliding Mode Control TechniquesTri RachmadijantoNo ratings yet
- The Bioartificial Pancreas (BAP)Document16 pagesThe Bioartificial Pancreas (BAP)Madalina FleancuNo ratings yet
- 1 s2.0 1350453395000461 MainDocument16 pages1 s2.0 1350453395000461 Mainrahmon_nsNo ratings yet
- Artificial PancreasDocument2 pagesArtificial PancreasrameshjeyNo ratings yet
- The Control System For The Nutrition ConcentrationDocument10 pagesThe Control System For The Nutrition ConcentrationSeptian Andi GunawanNo ratings yet
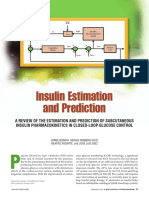
- Insulin Estimation and PredictionDocument20 pagesInsulin Estimation and PredictionLorenzo IraceNo ratings yet
- Robust PBPK/PD-Based Model PredictiveDocument13 pagesRobust PBPK/PD-Based Model PredictivenhatvpNo ratings yet
- Advancement in Insulcagon Pump Simulating As An Artificial Pancreas For The Treatment of DiabetesDocument5 pagesAdvancement in Insulcagon Pump Simulating As An Artificial Pancreas For The Treatment of Diabetesmosca90No ratings yet
- Development of A Multichannel Vestibular Prosthesis Prototype by Modification of A Commercially AvailableDocument10 pagesDevelopment of A Multichannel Vestibular Prosthesis Prototype by Modification of A Commercially Availableeng.alexandretinocoNo ratings yet
- Final ReviewDocument23 pagesFinal ReviewUdaya JakkaliNo ratings yet
- Bomba de Infusión de Insulina 2017Document11 pagesBomba de Infusión de Insulina 2017Mijael HuarayoNo ratings yet
- Biomaterial Solved PaperDocument13 pagesBiomaterial Solved PaperMalik Ibtasam OfficialNo ratings yet
- Cahyanurani 2019 J. Phys. Conf. Ser. 1367 012075Document10 pagesCahyanurani 2019 J. Phys. Conf. Ser. 1367 01207520129067No ratings yet
- A Multi-Technique Reconfigurable Electrochemical Biosensor Enabling Personal Health Monitoring in Mobile DevicesDocument10 pagesA Multi-Technique Reconfigurable Electrochemical Biosensor Enabling Personal Health Monitoring in Mobile Devicessr polNo ratings yet
- 6-Gingerol Ameliorates Weight Gain and Insulin Resistance in Metabolic Syndrome Rats by Regulating AdipocytokinesDocument8 pages6-Gingerol Ameliorates Weight Gain and Insulin Resistance in Metabolic Syndrome Rats by Regulating AdipocytokinesPATRICIA FELIA BUDIJARTONo ratings yet
- Design Simulation and Implementation of A Digital Pulse Oxygen Saturation Measurement System Using The Arduino MicrocontrollerDocument8 pagesDesign Simulation and Implementation of A Digital Pulse Oxygen Saturation Measurement System Using The Arduino MicrocontrollerSergio Arturo Dominguez Torrado0% (1)
- NIH Public Access: Author ManuscriptDocument19 pagesNIH Public Access: Author ManuscriptmilaNo ratings yet
- A Novel Needle-Injectable Millimeter Scale WirelesDocument12 pagesA Novel Needle-Injectable Millimeter Scale WirelesdiiinnaliinnnNo ratings yet
- Designing A Prototype of Implantable Digital Pill Using Internet of Things (Iot)Document6 pagesDesigning A Prototype of Implantable Digital Pill Using Internet of Things (Iot)JohnsonNo ratings yet
- Protein BiosensorsDocument11 pagesProtein Biosensorszarei.jNo ratings yet
- Journal Pone 0248280 PDFDocument17 pagesJournal Pone 0248280 PDFHafis KafitNo ratings yet
- Re-Usable Electrochemical Glucose Sensors Integrated Into A Smartphone PlatformDocument7 pagesRe-Usable Electrochemical Glucose Sensors Integrated Into A Smartphone PlatformMaria Alexandra GrigoreNo ratings yet
- Calorimetria LLMHDocument11 pagesCalorimetria LLMHfrida.yolotzin.rodriguezNo ratings yet
- Guardian Connect Patient BrochureDocument4 pagesGuardian Connect Patient BrochureZahra MobasherNo ratings yet
- Genetically Engineered Insulin: Saroj SinghDocument3 pagesGenetically Engineered Insulin: Saroj SinghFakeNo ratings yet
- Miniature Endoscopic Capsule Robot Using Biomimetic MicropatternDocument7 pagesMiniature Endoscopic Capsule Robot Using Biomimetic MicropatternvinothetisNo ratings yet
- Artificial Pancreas Device Systems For The Closed-Loop Control of Type 1 Diabetes: What Systems Are in Development?Document10 pagesArtificial Pancreas Device Systems For The Closed-Loop Control of Type 1 Diabetes: What Systems Are in Development?efNo ratings yet
- Continuous Glucose Monitoring 508Document4 pagesContinuous Glucose Monitoring 508Hadi jameel HadiNo ratings yet
- 02 Renard2017Document3 pages02 Renard2017MARCELO JOAQUIM GOMESNo ratings yet
- Broch BIOSTAT-Cplus SBI1505-e PDFDocument14 pagesBroch BIOSTAT-Cplus SBI1505-e PDFBrian VasquezNo ratings yet
- Acscatal 9b05071Document10 pagesAcscatal 9b05071sottorffNo ratings yet
- Acid Insoluble Ash As A Marker To Estimate Feed WastageDocument3 pagesAcid Insoluble Ash As A Marker To Estimate Feed WastageBrix SabsNo ratings yet
- Digital Technology For DiabetesDocument11 pagesDigital Technology For Diabetesvvandv123No ratings yet
- Formulation of Biotech ProductsDocument39 pagesFormulation of Biotech ProductssiñthiNo ratings yet
- Continuous Glucose MonitoringFrom EverandContinuous Glucose MonitoringWeiping JiaNo ratings yet
- Review Jonathan Lee (Sinn) (2012) - Sexual Trigger ProgramDocument6 pagesReview Jonathan Lee (Sinn) (2012) - Sexual Trigger ProgramAndre Victor0% (1)
- Functional Constipation: A Case Report: EpartmentDocument5 pagesFunctional Constipation: A Case Report: EpartmentArielIzaSuquilloNo ratings yet
- Transition To Anterior Approach in Primary Total Hip Arthroplasty Learning Curve ComplicationsDocument7 pagesTransition To Anterior Approach in Primary Total Hip Arthroplasty Learning Curve ComplicationsAthenaeum Scientific PublishersNo ratings yet
- The CPR Honor Is A Component of The .: Health Master AwardDocument5 pagesThe CPR Honor Is A Component of The .: Health Master AwardJun Siguenza AmbrocioNo ratings yet
- Dental Burs in Restorative Dentistry and Endodonticspast and Present A ReviewDocument8 pagesDental Burs in Restorative Dentistry and Endodonticspast and Present A ReviewAshyana SaeedNo ratings yet
- Horn International University College: Colleege of Health ScienceDocument27 pagesHorn International University College: Colleege of Health Sciencekaise AbdiNo ratings yet
- n119 So Kunjungan BP SPV Maulana Mulya Ke 2 18-08-2022 (Template Form So)Document183 pagesn119 So Kunjungan BP SPV Maulana Mulya Ke 2 18-08-2022 (Template Form So)niceso 21No ratings yet
- ACG Clinical Guideline For The Diagnosis And.154Document30 pagesACG Clinical Guideline For The Diagnosis And.154PNo ratings yet
- Big Heart BookDocument18 pagesBig Heart BookInglês The Right WayNo ratings yet
- Catalog of Sunflower OilsDocument17 pagesCatalog of Sunflower OilsJaemoon LimNo ratings yet
- Summarize The Concept of Consumer LearningDocument15 pagesSummarize The Concept of Consumer LearningPratipal Singh50% (2)
- Verbal Reasoning ExamDocument3 pagesVerbal Reasoning ExamSolomonNo ratings yet
- PE 1 ModuleDocument24 pagesPE 1 Moduleeric labordoNo ratings yet
- Effects of Childhood Trauma On Adolescent Mental HDocument9 pagesEffects of Childhood Trauma On Adolescent Mental Hlonjezoaustin357No ratings yet
- Understanding Nutrition 13th Edition Whitney Test BankDocument25 pagesUnderstanding Nutrition 13th Edition Whitney Test BankGaryBaxterbwse100% (35)
- Dentists From New YorkDocument3 pagesDentists From New YorkMD SHAHIN MIANo ratings yet
- Curio SlidesCarnivalDocument28 pagesCurio SlidesCarnivalIchiys cheeseNo ratings yet
- Gastrointestinal & Hepatobiliary SystemDocument3 pagesGastrointestinal & Hepatobiliary System24regineli305No ratings yet
- Ronnel Del RioDocument5 pagesRonnel Del Rioamity balweg100% (2)
- Artículo InmunocastraciónDocument6 pagesArtículo InmunocastraciónFernando Arauco VillarNo ratings yet
- Univ 224 ResumeDocument1 pageUniv 224 Resumeapi-302593800No ratings yet
- White Paper Track Changes VersionDocument9 pagesWhite Paper Track Changes Versionapi-619382143No ratings yet
- Health and DemographyDocument16 pagesHealth and DemographyNojoudNo ratings yet
- PPDocument2 pagesPPXIID41Sohan HazraNo ratings yet
- 2021 Ipa Annual Meeting - Mi Final Version W CommentsDocument40 pages2021 Ipa Annual Meeting - Mi Final Version W Commentsapi-546809761No ratings yet
- Netra Roga - Vishesha HetuDocument4 pagesNetra Roga - Vishesha HetuPavan SorathiyaNo ratings yet
- 510k Guidance For Indicators Used For SterilizationsDocument44 pages510k Guidance For Indicators Used For SterilizationsVickysh MevawalaNo ratings yet
- UT Health COVID-19 DataDocument10 pagesUT Health COVID-19 DatakxanwebteamNo ratings yet
























































































Download as pdf or txt
You might also like
- 1000-MCQS - PROSTHODONTICS-DEFINITIVE Answers PDFDocument43 pages1000-MCQS - PROSTHODONTICS-DEFINITIVE Answers PDFAnshuman Mohanty88% (17)
- Medical TattooingDocument66 pagesMedical TattooingTattooTattoo100% (4)
- BMEN4110 Lab1 PartA Artificial Pancreas 2021Document15 pagesBMEN4110 Lab1 PartA Artificial Pancreas 2021William GoldbergNo ratings yet
- Dia 2017 2525 AbstractsDocument134 pagesDia 2017 2525 AbstractsPranav Kumar Prabhakar100% (1)
- Arquivos Brasileiros de Endocrinologia & MetabologiaDocument6 pagesArquivos Brasileiros de Endocrinologia & MetabologiaThenmozhi KaranNo ratings yet
- Biomedical Signal Processing and Control: Iftikhar Ahmad, Faysal Munir, Muhammad Faizan MunirDocument8 pagesBiomedical Signal Processing and Control: Iftikhar Ahmad, Faysal Munir, Muhammad Faizan MunirBrasoveanu GheorghitaNo ratings yet
- A VHDL Implementation of The Biostator IIDocument5 pagesA VHDL Implementation of The Biostator IImuhammad syafiqNo ratings yet
- 125 2021 Article 5391Document9 pages125 2021 Article 5391Raluca CrinaNo ratings yet
- Subcutaneous Insulin Administration: Sufficient Progress or Ongoing Need?Document5 pagesSubcutaneous Insulin Administration: Sufficient Progress or Ongoing Need?Marcelo GomesNo ratings yet
- Simulating Human DigestionDocument35 pagesSimulating Human DigestionLIBARDO CASTAÑEDA FLOREZNo ratings yet
- A Fuzzy Controller For Blood Glucose-Insulin SysteDocument7 pagesA Fuzzy Controller For Blood Glucose-Insulin SysteBrasoveanu Gheorghita100% (1)
- Artificial Pancreas - RAEE 2017 PDFDocument6 pagesArtificial Pancreas - RAEE 2017 PDFZeeshanNo ratings yet
- Real Time Blood Sugar Monitoring: July 2017Document6 pagesReal Time Blood Sugar Monitoring: July 2017Khansa FadelseedNo ratings yet
- Insulin Pump ProjectDocument15 pagesInsulin Pump ProjectAndrei Deac100% (1)
- Closed Loop System Design For Wireless ArtificialDocument6 pagesClosed Loop System Design For Wireless ArtificialAmmar KhanNo ratings yet
- Bhattacharjee 2018Document12 pagesBhattacharjee 2018Brasoveanu GheorghitaNo ratings yet
- Artificial Pancreas Technology Offers Hope For Childhood DiabetesDocument11 pagesArtificial Pancreas Technology Offers Hope For Childhood DiabetesDiana PeñalozaNo ratings yet
- Student Member, IEEE, Kei Ikeda, Student Member, IEEE, Yudai Ogawa, Hiroyuki KaiDocument11 pagesStudent Member, IEEE, Kei Ikeda, Student Member, IEEE, Yudai Ogawa, Hiroyuki KaikalaiyarasiNo ratings yet
- Comparison Between PID-Fuzzy and Numerical Methods Based On Linear Algebra Controllers For Glucose Control in Type 1 Diabetes TreatmentDocument7 pagesComparison Between PID-Fuzzy and Numerical Methods Based On Linear Algebra Controllers For Glucose Control in Type 1 Diabetes Treatmentkaveendra.rcitNo ratings yet
- Prescription Updater For Victims With HyperglycemiaDocument4 pagesPrescription Updater For Victims With HyperglycemiaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Artificial Intelligence en DMDocument1 pageArtificial Intelligence en DMdadelapoNo ratings yet
- 856designing of Insulin Pump PDFDocument3 pages856designing of Insulin Pump PDFmaddyNo ratings yet
- Gilligan1994 PDFDocument6 pagesGilligan1994 PDF吳昇晃No ratings yet
- Design and Development of A Simulating Prototype Cost Effective Insulin Management SystemDocument3 pagesDesign and Development of A Simulating Prototype Cost Effective Insulin Management SystemRazan AlyahyaNo ratings yet
- Capabilities of Next-Generation Patch Pump: Improved Precision, Instant Occlusion Detection, and Dual-Hormone TherapyDocument6 pagesCapabilities of Next-Generation Patch Pump: Improved Precision, Instant Occlusion Detection, and Dual-Hormone TherapyMarcelo GomesNo ratings yet
- Sensors 21 07117Document25 pagesSensors 21 07117fhamdiNo ratings yet
- Proteomic Analysis of Human Plasma During Intermittent FastingDocument13 pagesProteomic Analysis of Human Plasma During Intermittent FastingioanalupumNo ratings yet
- Blood Glucose Regulation in Diabetics Using Sliding Mode Control TechniquesDocument14 pagesBlood Glucose Regulation in Diabetics Using Sliding Mode Control TechniquesTri RachmadijantoNo ratings yet
- The Bioartificial Pancreas (BAP)Document16 pagesThe Bioartificial Pancreas (BAP)Madalina FleancuNo ratings yet
- 1 s2.0 1350453395000461 MainDocument16 pages1 s2.0 1350453395000461 Mainrahmon_nsNo ratings yet
- Artificial PancreasDocument2 pagesArtificial PancreasrameshjeyNo ratings yet
- The Control System For The Nutrition ConcentrationDocument10 pagesThe Control System For The Nutrition ConcentrationSeptian Andi GunawanNo ratings yet
- Insulin Estimation and PredictionDocument20 pagesInsulin Estimation and PredictionLorenzo IraceNo ratings yet
- Robust PBPK/PD-Based Model PredictiveDocument13 pagesRobust PBPK/PD-Based Model PredictivenhatvpNo ratings yet
- Advancement in Insulcagon Pump Simulating As An Artificial Pancreas For The Treatment of DiabetesDocument5 pagesAdvancement in Insulcagon Pump Simulating As An Artificial Pancreas For The Treatment of Diabetesmosca90No ratings yet
- Development of A Multichannel Vestibular Prosthesis Prototype by Modification of A Commercially AvailableDocument10 pagesDevelopment of A Multichannel Vestibular Prosthesis Prototype by Modification of A Commercially Availableeng.alexandretinocoNo ratings yet
- Final ReviewDocument23 pagesFinal ReviewUdaya JakkaliNo ratings yet
- Bomba de Infusión de Insulina 2017Document11 pagesBomba de Infusión de Insulina 2017Mijael HuarayoNo ratings yet
- Biomaterial Solved PaperDocument13 pagesBiomaterial Solved PaperMalik Ibtasam OfficialNo ratings yet
- Cahyanurani 2019 J. Phys. Conf. Ser. 1367 012075Document10 pagesCahyanurani 2019 J. Phys. Conf. Ser. 1367 01207520129067No ratings yet
- A Multi-Technique Reconfigurable Electrochemical Biosensor Enabling Personal Health Monitoring in Mobile DevicesDocument10 pagesA Multi-Technique Reconfigurable Electrochemical Biosensor Enabling Personal Health Monitoring in Mobile Devicessr polNo ratings yet
- 6-Gingerol Ameliorates Weight Gain and Insulin Resistance in Metabolic Syndrome Rats by Regulating AdipocytokinesDocument8 pages6-Gingerol Ameliorates Weight Gain and Insulin Resistance in Metabolic Syndrome Rats by Regulating AdipocytokinesPATRICIA FELIA BUDIJARTONo ratings yet
- Design Simulation and Implementation of A Digital Pulse Oxygen Saturation Measurement System Using The Arduino MicrocontrollerDocument8 pagesDesign Simulation and Implementation of A Digital Pulse Oxygen Saturation Measurement System Using The Arduino MicrocontrollerSergio Arturo Dominguez Torrado0% (1)
- NIH Public Access: Author ManuscriptDocument19 pagesNIH Public Access: Author ManuscriptmilaNo ratings yet
- A Novel Needle-Injectable Millimeter Scale WirelesDocument12 pagesA Novel Needle-Injectable Millimeter Scale WirelesdiiinnaliinnnNo ratings yet
- Designing A Prototype of Implantable Digital Pill Using Internet of Things (Iot)Document6 pagesDesigning A Prototype of Implantable Digital Pill Using Internet of Things (Iot)JohnsonNo ratings yet
- Protein BiosensorsDocument11 pagesProtein Biosensorszarei.jNo ratings yet
- Journal Pone 0248280 PDFDocument17 pagesJournal Pone 0248280 PDFHafis KafitNo ratings yet
- Re-Usable Electrochemical Glucose Sensors Integrated Into A Smartphone PlatformDocument7 pagesRe-Usable Electrochemical Glucose Sensors Integrated Into A Smartphone PlatformMaria Alexandra GrigoreNo ratings yet
- Calorimetria LLMHDocument11 pagesCalorimetria LLMHfrida.yolotzin.rodriguezNo ratings yet
- Guardian Connect Patient BrochureDocument4 pagesGuardian Connect Patient BrochureZahra MobasherNo ratings yet
- Genetically Engineered Insulin: Saroj SinghDocument3 pagesGenetically Engineered Insulin: Saroj SinghFakeNo ratings yet
- Miniature Endoscopic Capsule Robot Using Biomimetic MicropatternDocument7 pagesMiniature Endoscopic Capsule Robot Using Biomimetic MicropatternvinothetisNo ratings yet
- Artificial Pancreas Device Systems For The Closed-Loop Control of Type 1 Diabetes: What Systems Are in Development?Document10 pagesArtificial Pancreas Device Systems For The Closed-Loop Control of Type 1 Diabetes: What Systems Are in Development?efNo ratings yet
- Continuous Glucose Monitoring 508Document4 pagesContinuous Glucose Monitoring 508Hadi jameel HadiNo ratings yet
- 02 Renard2017Document3 pages02 Renard2017MARCELO JOAQUIM GOMESNo ratings yet
- Broch BIOSTAT-Cplus SBI1505-e PDFDocument14 pagesBroch BIOSTAT-Cplus SBI1505-e PDFBrian VasquezNo ratings yet
- Acscatal 9b05071Document10 pagesAcscatal 9b05071sottorffNo ratings yet
- Acid Insoluble Ash As A Marker To Estimate Feed WastageDocument3 pagesAcid Insoluble Ash As A Marker To Estimate Feed WastageBrix SabsNo ratings yet
- Digital Technology For DiabetesDocument11 pagesDigital Technology For Diabetesvvandv123No ratings yet
- Formulation of Biotech ProductsDocument39 pagesFormulation of Biotech ProductssiñthiNo ratings yet
- Continuous Glucose MonitoringFrom EverandContinuous Glucose MonitoringWeiping JiaNo ratings yet
- Review Jonathan Lee (Sinn) (2012) - Sexual Trigger ProgramDocument6 pagesReview Jonathan Lee (Sinn) (2012) - Sexual Trigger ProgramAndre Victor0% (1)
- Functional Constipation: A Case Report: EpartmentDocument5 pagesFunctional Constipation: A Case Report: EpartmentArielIzaSuquilloNo ratings yet
- Transition To Anterior Approach in Primary Total Hip Arthroplasty Learning Curve ComplicationsDocument7 pagesTransition To Anterior Approach in Primary Total Hip Arthroplasty Learning Curve ComplicationsAthenaeum Scientific PublishersNo ratings yet
- The CPR Honor Is A Component of The .: Health Master AwardDocument5 pagesThe CPR Honor Is A Component of The .: Health Master AwardJun Siguenza AmbrocioNo ratings yet
- Dental Burs in Restorative Dentistry and Endodonticspast and Present A ReviewDocument8 pagesDental Burs in Restorative Dentistry and Endodonticspast and Present A ReviewAshyana SaeedNo ratings yet
- Horn International University College: Colleege of Health ScienceDocument27 pagesHorn International University College: Colleege of Health Sciencekaise AbdiNo ratings yet
- n119 So Kunjungan BP SPV Maulana Mulya Ke 2 18-08-2022 (Template Form So)Document183 pagesn119 So Kunjungan BP SPV Maulana Mulya Ke 2 18-08-2022 (Template Form So)niceso 21No ratings yet
- ACG Clinical Guideline For The Diagnosis And.154Document30 pagesACG Clinical Guideline For The Diagnosis And.154PNo ratings yet
- Big Heart BookDocument18 pagesBig Heart BookInglês The Right WayNo ratings yet
- Catalog of Sunflower OilsDocument17 pagesCatalog of Sunflower OilsJaemoon LimNo ratings yet
- Summarize The Concept of Consumer LearningDocument15 pagesSummarize The Concept of Consumer LearningPratipal Singh50% (2)
- Verbal Reasoning ExamDocument3 pagesVerbal Reasoning ExamSolomonNo ratings yet
- PE 1 ModuleDocument24 pagesPE 1 Moduleeric labordoNo ratings yet
- Effects of Childhood Trauma On Adolescent Mental HDocument9 pagesEffects of Childhood Trauma On Adolescent Mental Hlonjezoaustin357No ratings yet
- Understanding Nutrition 13th Edition Whitney Test BankDocument25 pagesUnderstanding Nutrition 13th Edition Whitney Test BankGaryBaxterbwse100% (35)
- Dentists From New YorkDocument3 pagesDentists From New YorkMD SHAHIN MIANo ratings yet
- Curio SlidesCarnivalDocument28 pagesCurio SlidesCarnivalIchiys cheeseNo ratings yet
- Gastrointestinal & Hepatobiliary SystemDocument3 pagesGastrointestinal & Hepatobiliary System24regineli305No ratings yet
- Ronnel Del RioDocument5 pagesRonnel Del Rioamity balweg100% (2)
- Artículo InmunocastraciónDocument6 pagesArtículo InmunocastraciónFernando Arauco VillarNo ratings yet
- Univ 224 ResumeDocument1 pageUniv 224 Resumeapi-302593800No ratings yet
- White Paper Track Changes VersionDocument9 pagesWhite Paper Track Changes Versionapi-619382143No ratings yet
- Health and DemographyDocument16 pagesHealth and DemographyNojoudNo ratings yet
- PPDocument2 pagesPPXIID41Sohan HazraNo ratings yet
- 2021 Ipa Annual Meeting - Mi Final Version W CommentsDocument40 pages2021 Ipa Annual Meeting - Mi Final Version W Commentsapi-546809761No ratings yet
- Netra Roga - Vishesha HetuDocument4 pagesNetra Roga - Vishesha HetuPavan SorathiyaNo ratings yet
- 510k Guidance For Indicators Used For SterilizationsDocument44 pages510k Guidance For Indicators Used For SterilizationsVickysh MevawalaNo ratings yet
- UT Health COVID-19 DataDocument10 pagesUT Health COVID-19 DatakxanwebteamNo ratings yet