Download as pdf or txt
You might also like
- Assignment Academic Year 2021-22: BM565 Digital Business & New Technologies DR Muhammad HaqueDocument8 pagesAssignment Academic Year 2021-22: BM565 Digital Business & New Technologies DR Muhammad HaqueRahul SarkarNo ratings yet
- Bizerba Ec 100 Service Manual: Read/DownloadDocument3 pagesBizerba Ec 100 Service Manual: Read/Downloadconstantine ilyes0% (1)
- Leyland HA6ETI Service ManualDocument72 pagesLeyland HA6ETI Service ManualPolavarapu Sreedhar100% (4)
- Loader Power-Split Transmission System Based On A Planetary Gear SetDocument8 pagesLoader Power-Split Transmission System Based On A Planetary Gear SetsughieantoNo ratings yet
- Lift Energy ConsumptionDocument10 pagesLift Energy ConsumptionNguyễn Thế PhongNo ratings yet
- 8HP70 Automatic Transmission-Basic Design Analysis and Modular Hybrid Design RecommendationsDocument7 pages8HP70 Automatic Transmission-Basic Design Analysis and Modular Hybrid Design RecommendationsАКПП СервисNo ratings yet
- Case Study of ToyotaDocument22 pagesCase Study of ToyotaRohit Shirude100% (2)
- VSD From Avec HHVDocument16 pagesVSD From Avec HHVmarkomasNo ratings yet
- 02 - Comparison Between Input Coupled and Output Coupled Power Split CVTDocument10 pages02 - Comparison Between Input Coupled and Output Coupled Power Split CVTYundi GaoNo ratings yet
- Electric Vehicles QBDocument13 pagesElectric Vehicles QBSiddhuNo ratings yet
- paperDocument20 pagespaperMohamad DeebNo ratings yet
- Algorithm For Selection of Motor and VehicleDocument5 pagesAlgorithm For Selection of Motor and Vehiclebodkhe harshNo ratings yet
- TOPOLOGIAS Topological Overview of Hybrid Electric and Fuel Cell Vehicular Power System Architectures and ConfigurationsDocument8 pagesTOPOLOGIAS Topological Overview of Hybrid Electric and Fuel Cell Vehicular Power System Architectures and ConfigurationsAngel SilvaNo ratings yet
- Critical Review of Direct-Drive Electrical Machine Systems For Electric and Hybrid Electric VehiclesDocument12 pagesCritical Review of Direct-Drive Electrical Machine Systems For Electric and Hybrid Electric VehiclesFrankenstein ReichNo ratings yet
- Comparison of Four-Wheel-Drive Hybrid Powertrain ConfigurationsDocument13 pagesComparison of Four-Wheel-Drive Hybrid Powertrain ConfigurationsCostin DanielNo ratings yet
- A Comprehensive Overview of Hybrid ConstructionDocument15 pagesA Comprehensive Overview of Hybrid ConstructionShativel ViswanathanNo ratings yet
- Modeling and Control of Electric Hybrid Vehicles - 231108 - 121158Document7 pagesModeling and Control of Electric Hybrid Vehicles - 231108 - 121158Nay ThwayNo ratings yet
- Energy Efficient Hydraulic Hybrid Drives: January 2009Document15 pagesEnergy Efficient Hydraulic Hybrid Drives: January 2009Muh AmmadNo ratings yet
- Trend in Wind Turbine Drive TrainsDocument5 pagesTrend in Wind Turbine Drive TrainsMarcos Gómez PérezNo ratings yet
- Parallel HEV Hybrid Controller Modeling For Power ManagementDocument7 pagesParallel HEV Hybrid Controller Modeling For Power ManagementIago HenriqueNo ratings yet
- Chuyển đổi báo cáo08Document12 pagesChuyển đổi báo cáo0821OT112- Huỳnh Gia KiệtNo ratings yet
- Analysis of Development of Transmission in HybridDocument5 pagesAnalysis of Development of Transmission in HybridNarendra PatilNo ratings yet
- An Overview of Hybrid Electric Vehicle Motor Drives: February 2021Document8 pagesAn Overview of Hybrid Electric Vehicle Motor Drives: February 2021TopNo ratings yet
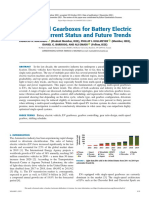
- Multi-Speed Gearboxes For Battery Electric Vehicles Current Status and Future TrendsDocument17 pagesMulti-Speed Gearboxes For Battery Electric Vehicles Current Status and Future TrendsSamial HasnatNo ratings yet
- Review of Ywheel Based Internal Combustion Engine Hybrid VehiclesDocument20 pagesReview of Ywheel Based Internal Combustion Engine Hybrid VehiclesМухаммад АбдуллатифNo ratings yet
- Energy Management Strategy For Diesel HyDocument8 pagesEnergy Management Strategy For Diesel HyErnesto ZamoraNo ratings yet
- Mathematical Modeling of The Three Phase Induction Motor Couple To DC Motor in Hybrid Electric VehicleDocument5 pagesMathematical Modeling of The Three Phase Induction Motor Couple To DC Motor in Hybrid Electric Vehiclenico dishanthNo ratings yet
- Development of A Hydro-Mechanical Hydraulic Hybrid Drive Train With Independent Wheel Torque Control For An Urban Passenger VehicleDocument11 pagesDevelopment of A Hydro-Mechanical Hydraulic Hybrid Drive Train With Independent Wheel Torque Control For An Urban Passenger Vehicleمحمد جوادNo ratings yet
- Basics of Electric Vehicle Technology and A Design StudyDocument5 pagesBasics of Electric Vehicle Technology and A Design StudyHuynh Thanh AnhNo ratings yet
- Paper 3Document23 pagesPaper 3Swati NikamNo ratings yet
- Chapter 4 Â LT and Sheet 4 - Actuators and DrivesDocument8 pagesChapter 4 Â LT and Sheet 4 - Actuators and DrivesHossam Mohamed Ahmed ahmedNo ratings yet
- Paper - Presentation Hybrid - Vehicle NewDocument10 pagesPaper - Presentation Hybrid - Vehicle NewIsac DanielNo ratings yet
- Hybrid Electric Vehicle: Rushikesh Trushar SoniDocument4 pagesHybrid Electric Vehicle: Rushikesh Trushar SoniPuttaraje GowdaNo ratings yet
- Modelling and Control of Hybrid VehicleDocument11 pagesModelling and Control of Hybrid VehicleTrần Kế HưngNo ratings yet
- Energies: Energy Consumption of A Battery Electric Vehicle With Infinitely Variable TransmissionDocument21 pagesEnergies: Energy Consumption of A Battery Electric Vehicle With Infinitely Variable TransmissionGautham NNo ratings yet
- Traction Electrification of Heavy Off-Road Vehicle: Case Study of Backhoe Loader Operating in BackfillDocument8 pagesTraction Electrification of Heavy Off-Road Vehicle: Case Study of Backhoe Loader Operating in BackfillPedro Andrade de OliveiraNo ratings yet
- Hybrid Electric VehicleDocument4 pagesHybrid Electric VehicleIOSRjournalNo ratings yet
- The Application of Bevel GearsDocument6 pagesThe Application of Bevel GearsPrasanth ThiagarajanNo ratings yet
- ExcavatorEnergy savingEfficiencyBasedonDieselEngineDocument9 pagesExcavatorEnergy savingEfficiencyBasedonDieselEngineyusufNo ratings yet
- Mesin HybridDocument4 pagesMesin HybridAlpha bagasNo ratings yet
- Efficiency Enhancement of A New Two-Motor Hybrid SystemDocument11 pagesEfficiency Enhancement of A New Two-Motor Hybrid SystemAnchal SaxenaNo ratings yet
- Automotive 1 HandbookDocument301 pagesAutomotive 1 HandbookJose CespedesNo ratings yet
- Lesson 3 - Power Conversions in A VehicleDocument18 pagesLesson 3 - Power Conversions in A Vehiclejaydi.maat.02No ratings yet
- Optimal Design of Power-Split Transmissions For Hydraulic Hybrid Passenger VehiclesDocument6 pagesOptimal Design of Power-Split Transmissions For Hydraulic Hybrid Passenger VehiclesDavid IonutzNo ratings yet
- Modeling, Simulation, and Analysis of Hybrid Electric Vehicle Using MATLAB Simulink2Document5 pagesModeling, Simulation, and Analysis of Hybrid Electric Vehicle Using MATLAB Simulink2SureshNo ratings yet
- Technical Description of Toyota's Hybrid Synergy DriveDocument9 pagesTechnical Description of Toyota's Hybrid Synergy Drivedevoncates100% (1)
- Report On Lecture 21Document4 pagesReport On Lecture 21Surajit SahaNo ratings yet
- A Four-Wheel-Drive Fully Electric Vehicle Layout With Two-Speed TransmissionsDocument6 pagesA Four-Wheel-Drive Fully Electric Vehicle Layout With Two-Speed TransmissionsSwati NikamNo ratings yet
- Chuyển đổi báo cáoDocument12 pagesChuyển đổi báo cáo21OT112- Huỳnh Gia KiệtNo ratings yet
- 2010 01 1757 PDFDocument12 pages2010 01 1757 PDFSteven SullivanNo ratings yet
- An Overview of Electrical Vehicle and Hybrid Electrical Vehicle DrivesDocument5 pagesAn Overview of Electrical Vehicle and Hybrid Electrical Vehicle DrivesravigobiNo ratings yet
- Simulation Models of Skidder Conventional and Hybrid DriveDocument19 pagesSimulation Models of Skidder Conventional and Hybrid DriveDedi stwnNo ratings yet
- Basics of Electric Vehicle Technology and A DesignDocument6 pagesBasics of Electric Vehicle Technology and A DesignCarlos HT Tmberto Tranamil BarrosNo ratings yet
- Simulation Model of A Military HEV With A Highly Redundant ArchitectureDocument10 pagesSimulation Model of A Military HEV With A Highly Redundant ArchitectureSekwah HawkesNo ratings yet
- 2020 Ditrolio ''A Hybrid Power-Unit Based On A Passive Fuel Cellbattery System For Light Weight Vehicles''Document11 pages2020 Ditrolio ''A Hybrid Power-Unit Based On A Passive Fuel Cellbattery System For Light Weight Vehicles''Abdul RehmanNo ratings yet
- Modelling and Analysis of Plug-In Series-Parallel Hybrid Medium-Duty VehiclesDocument10 pagesModelling and Analysis of Plug-In Series-Parallel Hybrid Medium-Duty VehiclesEduardo Garcia VázquezNo ratings yet
- Specifications and Design of A PM Electric Variable Transmission For Toyota Prius IIDocument9 pagesSpecifications and Design of A PM Electric Variable Transmission For Toyota Prius IIIvan VillanevaNo ratings yet
- Hybrid Electric Two Wheeler IJSRDV6 I21255Document6 pagesHybrid Electric Two Wheeler IJSRDV6 I21255shridhar muthuNo ratings yet
- Chuyển đổi báo cáoDocument2 pagesChuyển đổi báo cáo21OT112- Huỳnh Gia KiệtNo ratings yet
- Edt Seminar ReportDocument10 pagesEdt Seminar Reportinteresting facts in worldNo ratings yet
- Hybrid VehicleDocument7 pagesHybrid VehicleacairalexNo ratings yet
- Comparison of Technical Features Between ADocument6 pagesComparison of Technical Features Between AFrisco TejNo ratings yet
- Introduction to Hybrid Vehicle System Modeling and ControlFrom EverandIntroduction to Hybrid Vehicle System Modeling and ControlRating: 4 out of 5 stars4/5 (1)
- Nuevo Hoja de Cálculo de Microsoft ExcelDocument12 pagesNuevo Hoja de Cálculo de Microsoft ExcelrobertoNo ratings yet
- Reliability Engineering - A Life Cycle ApproachDocument439 pagesReliability Engineering - A Life Cycle Approachroberto100% (1)
- Reliability Engineering - Methods and ApplicationsDocument458 pagesReliability Engineering - Methods and ApplicationsrobertoNo ratings yet
- Midterm Exam 1Document2 pagesMidterm Exam 1robertoNo ratings yet
- 6852-8 - Super NWD 30 and 50 5100 TK6852-8Document259 pages6852-8 - Super NWD 30 and 50 5100 TK6852-8Victor LepizNo ratings yet
- Security For ManagementDocument9 pagesSecurity For ManagementAyyansh&Amyrah MasurkarNo ratings yet
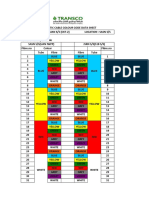
- Foc Colour Code Data SheetDocument3 pagesFoc Colour Code Data Sheetpari84No ratings yet
- Unit-1: Previous Year JNTUH QuestionDocument2 pagesUnit-1: Previous Year JNTUH Questionnagarjuna100% (1)
- Students - AI Track CS Master SaclayDocument50 pagesStudents - AI Track CS Master SaclayHoàngHenryNo ratings yet
- Quadratic PlaygroundDocument4 pagesQuadratic PlaygroundNARENDRAN SNo ratings yet
- Padua International Excellence Scholarship Results - Unlimited Access Degree Programmes A.Y. 23-24 - 0Document3 pagesPadua International Excellence Scholarship Results - Unlimited Access Degree Programmes A.Y. 23-24 - 0Monsieur RoneNo ratings yet
- C++ Programming: Assignment, Formatting, & Interactive InputDocument31 pagesC++ Programming: Assignment, Formatting, & Interactive InputUmar ShahNo ratings yet
- Service Bulletins S1200-SeriesDocument2 pagesService Bulletins S1200-Seriesmecarservices1No ratings yet
- Swimming Pool Technologial - ENGDocument16 pagesSwimming Pool Technologial - ENGGentaNo ratings yet
- Outlier DetectionDocument41 pagesOutlier DetectionTanishi GuptaNo ratings yet
- XII IP Practical FileDocument52 pagesXII IP Practical FileHarsh RoutelaNo ratings yet
- Electronic LESF Consolidation Template - Final PDFDocument1 pageElectronic LESF Consolidation Template - Final PDFElla David83% (6)
- sg246699 NewDocument274 pagessg246699 NewNirmal KumarNo ratings yet
- 1improvement Algorithms of Perceptually Important P PDFDocument5 pages1improvement Algorithms of Perceptually Important P PDFredameNo ratings yet
- MWEB Business Hacked: MD. Shakil Rahman Id-2124161047Document9 pagesMWEB Business Hacked: MD. Shakil Rahman Id-2124161047ShakilNo ratings yet
- SECURITYDocument3 pagesSECURITYRich PunkzNo ratings yet
- OI FLOWSIC150 en 8010815Document72 pagesOI FLOWSIC150 en 8010815NicuVisanNo ratings yet
- TD Esc 02 de en 15 032 Rev000 List of Tools Grid Connection E 101Document20 pagesTD Esc 02 de en 15 032 Rev000 List of Tools Grid Connection E 101Felipe SilvaNo ratings yet
- Conservation of Energy Quiz v2 (20 Points) : MV KE KX EPEDocument4 pagesConservation of Energy Quiz v2 (20 Points) : MV KE KX EPELiam ReillyNo ratings yet
- Science A STEM Approach RIC Publications Lesson Six Chemical Sciences A Matter of Change Year 5Document5 pagesScience A STEM Approach RIC Publications Lesson Six Chemical Sciences A Matter of Change Year 5Neil MenezesNo ratings yet
- Stud Bolt ItalyDocument58 pagesStud Bolt ItalyMohamed RaafatNo ratings yet
- Models 3885, 3886, 3887: Installation, Operation and Maintenance InstructionsDocument36 pagesModels 3885, 3886, 3887: Installation, Operation and Maintenance Instructionsjordanron88No ratings yet
- The Use of Search Engines Learning Competency: Use Search Engines To Conduct A Guided Search On A Given Topic. EN7SS-II-c-1.5.3Document7 pagesThe Use of Search Engines Learning Competency: Use Search Engines To Conduct A Guided Search On A Given Topic. EN7SS-II-c-1.5.3Muzfa Palattao MangasilNo ratings yet
- Catalago de Partes CaterpillarDocument16 pagesCatalago de Partes CaterpillarYohan CalderonNo ratings yet
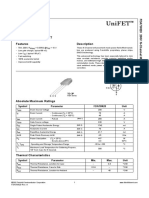
- Unifet: Fda70N20Document8 pagesUnifet: Fda70N20Muhammad SalahuddinNo ratings yet
- Section1 For cs50Document90 pagesSection1 For cs50wwwron456No ratings yet