
Solving Forward and Inverse Problems of Contact Mechanics Using Physics-Informed Neural Networks
Solving Forward and Inverse Problems of Contact Mechanics Using Physics-Informed Neural Networks
You might also like
- CABLE TRAY-Refrigeration PipesDocument1 pageCABLE TRAY-Refrigeration Pipesmilindskulkarni2005@yahoo.co.inNo ratings yet
- Graph Theoretic Methods in Multiagent NetworksFrom EverandGraph Theoretic Methods in Multiagent NetworksRating: 5 out of 5 stars5/5 (1)
- Är Över Bättre Åvan FlygaDocument668 pagesÄr Över Bättre Åvan Flygaerikjohansson91No ratings yet
- Analysis & Design of Dolphin PilesDocument376 pagesAnalysis & Design of Dolphin PilesMotasem Matarneh100% (2)
- A Deep Learning Framework For Solution and Discovery in Solid MechanicsDocument24 pagesA Deep Learning Framework For Solution and Discovery in Solid MechanicseliwzNo ratings yet
- Transfer Learning EnhancedDocument18 pagesTransfer Learning EnhancedVictor RiveraNo ratings yet
- An Introduction To Programming Physics-Informed Neural Network-Based Computational Solid MechanicsDocument32 pagesAn Introduction To Programming Physics-Informed Neural Network-Based Computational Solid MechanicswNo ratings yet
- Deep Learning-Accelerated Computational Framework Based On PhysicsDocument51 pagesDeep Learning-Accelerated Computational Framework Based On Physicssohel ranaNo ratings yet
- Integrated Finite Element Neural Network I FENN For Non Local Continuum Damage Mechanics Response To PublisherDocument57 pagesIntegrated Finite Element Neural Network I FENN For Non Local Continuum Damage Mechanics Response To PublisherNealNo ratings yet
- Geometry Aware Physics Informed Neural Network SurDocument15 pagesGeometry Aware Physics Informed Neural Network SurThe SangeNo ratings yet
- 2021, Linka, Constitutive Artificial Neural NetworksDocument17 pages2021, Linka, Constitutive Artificial Neural NetworksaleromendeNo ratings yet
- Applications of Finite Element Method in Structural EngineeringDocument8 pagesApplications of Finite Element Method in Structural Engineeringdennis khisaNo ratings yet
- Stress Field Prediction in Cantilevered Structures Using Convolutional NeuralDocument10 pagesStress Field Prediction in Cantilevered Structures Using Convolutional Neuralyousefrezek95No ratings yet
- Physics-Informed Neural Network For Modeling Dynamic Linear ElasticityDocument18 pagesPhysics-Informed Neural Network For Modeling Dynamic Linear Elasticitydschoudhary369No ratings yet
- Finite Basis Physics-Informed Neural Networks (Fbpinns) : A Scalable Domain Decomposition Approach For Solving Differential EquationsDocument39 pagesFinite Basis Physics-Informed Neural Networks (Fbpinns) : A Scalable Domain Decomposition Approach For Solving Differential EquationsAryan SinghNo ratings yet
- Icsbe2016 252Document8 pagesIcsbe2016 252mansurreka7No ratings yet
- Ling 2016Document14 pagesLing 2016Rafael SalgadoNo ratings yet
- C PINNDocument27 pagesC PINNJoão Pedro OliveiraNo ratings yet
- On The Order of Derivation in The Training of Physics-Informed Neural Networks: Case Studies For Non-Uniform Beam StructuresDocument23 pagesOn The Order of Derivation in The Training of Physics-Informed Neural Networks: Case Studies For Non-Uniform Beam StructuresGogyNo ratings yet
- Physics-constrained deep learning for high-dimensional surrogate modeling and uncertainty qu-已压缩Document26 pagesPhysics-constrained deep learning for high-dimensional surrogate modeling and uncertainty qu-已压缩ex wNo ratings yet
- Mitra2021 Article DeterminationOfStableStructureDocument12 pagesMitra2021 Article DeterminationOfStableStructurepinakiNo ratings yet
- Application of Physics-Informed Neural Networks For Forward and Inverse Analysis of Pile-Soil InteractionDocument17 pagesApplication of Physics-Informed Neural Networks For Forward and Inverse Analysis of Pile-Soil InteractionNavoar FormaitNo ratings yet
- (W-8145) Designs To Improve Capability of Neural Networks To Make Structural PredictionsDocument9 pages(W-8145) Designs To Improve Capability of Neural Networks To Make Structural PredictionsNazmul SaqibNo ratings yet
- Preliminary Study On The Resolution of Electro-ThermalDocument15 pagesPreliminary Study On The Resolution of Electro-ThermalQuang Nguyễn MinhNo ratings yet
- 2023-Pre-Training Strategy For Solving Evolution Equations Based On Physics-Informed Neural NetworksDocument19 pages2023-Pre-Training Strategy For Solving Evolution Equations Based On Physics-Informed Neural NetworksmaycvcNo ratings yet
- Optimized Design of Parity Relation-Based Residual Generator For Fault Detection Data-Driven ApproachesDocument10 pagesOptimized Design of Parity Relation-Based Residual Generator For Fault Detection Data-Driven ApproachesDr.Suresh Chavhan -IIITKNo ratings yet
- Pinn F: A T - B F - F P - I N N: S Ormer Ransformer Ased Rame Work OR Hysics Nformed Eural EtworksDocument16 pagesPinn F: A T - B F - F P - I N N: S Ormer Ransformer Ased Rame Work OR Hysics Nformed Eural EtworksXiCheng WangNo ratings yet
- Renato - A Tutorial On Solving Ordinary Differential Equations Using Python and Hybrid Physics-Informed Neural NetworkDocument11 pagesRenato - A Tutorial On Solving Ordinary Differential Equations Using Python and Hybrid Physics-Informed Neural NetworkbakidokiNo ratings yet
- Physics Informed Neural Network SolutionDocument23 pagesPhysics Informed Neural Network SolutionAhmed RahmanNo ratings yet
- Icsbe2016 252Document8 pagesIcsbe2016 252MahindaNo ratings yet
- Modelling 05 00009Document27 pagesModelling 05 00009TnsORTYNo ratings yet
- On Self-Learning Finite Element Codes Based On Monitored Response of StructuresDocument19 pagesOn Self-Learning Finite Element Codes Based On Monitored Response of StructuresgunjanNo ratings yet
- A General Machine Learning-Based Approach For Inverse Design of One-Dimensional Photonic Crystals Toward Targeted Visible Light Re Ection SpectrumDocument18 pagesA General Machine Learning-Based Approach For Inverse Design of One-Dimensional Photonic Crystals Toward Targeted Visible Light Re Ection SpectrumyassinebouazziNo ratings yet
- Composites Part B: Shibo Yan, Xi Zou, Mohammad Ilkhani, Arthur JonesDocument11 pagesComposites Part B: Shibo Yan, Xi Zou, Mohammad Ilkhani, Arthur JonesLucas CarvalhoNo ratings yet
- Artificial Neural Networks in Structural Dynamics: A New Modular Radial Basis Function Approach vs. Convolutional and Feedforward TopologiesDocument16 pagesArtificial Neural Networks in Structural Dynamics: A New Modular Radial Basis Function Approach vs. Convolutional and Feedforward Topologiesvicto1111No ratings yet
- Journal of Statistical SoftwareDocument20 pagesJournal of Statistical Softwareuri20No ratings yet
- Structural Contr Hlth - 2021 - Caceres - A probabilistic Bayesian recurrent neural network for remaining useful lifeDocument21 pagesStructural Contr Hlth - 2021 - Caceres - A probabilistic Bayesian recurrent neural network for remaining useful lifeex wNo ratings yet
- Dynamic Link Prediction by Learning The Representatio - 2024 - Expert Systems WiDocument8 pagesDynamic Link Prediction by Learning The Representatio - 2024 - Expert Systems WiPhi MaiNo ratings yet
- Turbulence Using Neural NetworksDocument22 pagesTurbulence Using Neural NetworksrandNo ratings yet
- 1 s2.0 S009813542200196X MainDocument16 pages1 s2.0 S009813542200196X Maina1s2d3q1No ratings yet
- Neural NetworksDocument23 pagesNeural NetworkslulamamakarimgeNo ratings yet
- Combining The Finite Element Method and Artificial Intelligence in Manufacturing Modeling and OptimizationDocument40 pagesCombining The Finite Element Method and Artificial Intelligence in Manufacturing Modeling and OptimizationtrongndNo ratings yet
- Combinatorial Optimization and Reasoning With Graph Neural NetworksDocument61 pagesCombinatorial Optimization and Reasoning With Graph Neural Networksj3qbzodj7No ratings yet
- 10.1515 - Nanoph 2023 0292Document11 pages10.1515 - Nanoph 2023 0292yz-zhao20No ratings yet
- Deep Autoencoders For Physics-Constrained Data-Driven Nonlinear Materials ModelingDocument29 pagesDeep Autoencoders For Physics-Constrained Data-Driven Nonlinear Materials ModelingJerry GreyNo ratings yet
- Accepted Manuscript: Journal of Computational PhysicsDocument47 pagesAccepted Manuscript: Journal of Computational Physicsjuan carlos molano toroNo ratings yet
- 2023-Physics-Informed Recurrent Neural Networks and Hyper-Parameter Optimization For Dynamic Process SystemsDocument13 pages2023-Physics-Informed Recurrent Neural Networks and Hyper-Parameter Optimization For Dynamic Process SystemsmaycvcNo ratings yet
- 7 Differentiable Physics SimulatDocument5 pages7 Differentiable Physics SimulatimsgsattiNo ratings yet
- Fcteg 02 632417Document5 pagesFcteg 02 632417mda mpsNo ratings yet
- Schütt Et Al. - 2021 - Equivariant Message Passing For The Prediction ofDocument13 pagesSchütt Et Al. - 2021 - Equivariant Message Passing For The Prediction of1045013245leoNo ratings yet
- Topological Data Analysis For Network ResilienceDocument17 pagesTopological Data Analysis For Network Resilienceragnar.rpgNo ratings yet
- 1 s2.0 S0022509618310688 Main PDFDocument27 pages1 s2.0 S0022509618310688 Main PDFAymen DanounNo ratings yet
- Econometrica - 2021 - Farrell - Deep Neural Networks for Estimation and InferenceDocument33 pagesEconometrica - 2021 - Farrell - Deep Neural Networks for Estimation and InferenceGordon VanderbiltNo ratings yet
- Big Data Analytics For Grid ModernizationDocument2 pagesBig Data Analytics For Grid ModernizationJose Sebastian Rojas ArdilaNo ratings yet
- Solar Power Forecasting Using Deep Learning Techniques-3Document7 pagesSolar Power Forecasting Using Deep Learning Techniques-3Sarhro ELNo ratings yet
- Xingbaogao 2010Document12 pagesXingbaogao 2010ericksonyanambuNo ratings yet
- A Review of Artificial Neural Networks in The Constitutive Modeling of Composite MaterialsDocument15 pagesA Review of Artificial Neural Networks in The Constitutive Modeling of Composite MaterialsGiuseppeNo ratings yet
- 11.5-Machine Learning and EvolutionaryDocument18 pages11.5-Machine Learning and Evolutionaryergouwang305No ratings yet
- Physics Informed Neural Networks M Raissi P Perdikaris G E Karniadakis Download PDF ChapterDocument51 pagesPhysics Informed Neural Networks M Raissi P Perdikaris G E Karniadakis Download PDF Chaptergary.taylor799100% (7)
- Review On Composite - Laminated Material Analysis in Matlab Using Peizo - Electric Sensor and ActuatorDocument7 pagesReview On Composite - Laminated Material Analysis in Matlab Using Peizo - Electric Sensor and ActuatorSouha BaliNo ratings yet
- Bayesian Tomography Using Polynomial Chaos Expansion and Deep Generative NetworksDocument18 pagesBayesian Tomography Using Polynomial Chaos Expansion and Deep Generative Networksricit48236No ratings yet
- Back Propagation Neural NetworkDocument10 pagesBack Propagation Neural NetworkAhmad Bisyrul HafiNo ratings yet
- A Novel Neural Network For Nonlinear Convex Programming: Xing-Bao GaoDocument9 pagesA Novel Neural Network For Nonlinear Convex Programming: Xing-Bao GaoIvan JourdanNo ratings yet
- Lecture No. 2: Maxwell Equations and Special Relativity in AcceleratorsDocument22 pagesLecture No. 2: Maxwell Equations and Special Relativity in AcceleratorsEkky AndreanNo ratings yet
- Fundamentals OF Movement Skills V Fundamental Movement SkillsDocument6 pagesFundamentals OF Movement Skills V Fundamental Movement SkillsCharmaine JanorasNo ratings yet
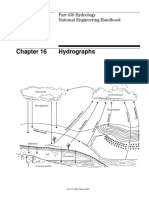
- Hydrographs USDA SCSDocument50 pagesHydrographs USDA SCSdiebuisaNo ratings yet
- Principles of Structural Analysis and DesignDocument1 pagePrinciples of Structural Analysis and DesigngellianforniasNo ratings yet
- ReportDocument5 pagesReportspsingh_jmdNo ratings yet
- UBC Guide To BearingsDocument44 pagesUBC Guide To BearingsVirgilioNo ratings yet
- F1378 1479757-1Document5 pagesF1378 1479757-1Thaweekarn ChangthongNo ratings yet
- E X50 X100 X200Document2 pagesE X50 X100 X200Mahdi HajizadehNo ratings yet
- Comparison of Three Linearization Methods: Jonas Persson Lennart S OderDocument7 pagesComparison of Three Linearization Methods: Jonas Persson Lennart S OdernileshsmateNo ratings yet
- Design of PID Controller For The Modified Quadruple-Tank Process Using Inverted Decoupling TechniqueDocument5 pagesDesign of PID Controller For The Modified Quadruple-Tank Process Using Inverted Decoupling TechniqueMAURY SEBASTIAN MACIAS SANCHEZNo ratings yet
- Impulsing The Pendulum: Escapement Error: by Dr. George Feinstein (NY)Document21 pagesImpulsing The Pendulum: Escapement Error: by Dr. George Feinstein (NY)jmtiraNo ratings yet
- Selenium-75 Sources and Source Holders: ApplicationsDocument2 pagesSelenium-75 Sources and Source Holders: ApplicationsTanpreet SinghNo ratings yet
- Undrained Lateral Pile Response in Slopi PDFDocument12 pagesUndrained Lateral Pile Response in Slopi PDFAhmed RamadanNo ratings yet
- Inverted Pendulum NotesDocument36 pagesInverted Pendulum Notesstephanie-tabe-1593No ratings yet
- Investment Casting SurveyDocument16 pagesInvestment Casting SurveySamip SolankiNo ratings yet
- Formula Derivation: Stefan'S LawDocument7 pagesFormula Derivation: Stefan'S LawRitesh BhoiteNo ratings yet
- DTS0068 - PER Measurement PDFDocument5 pagesDTS0068 - PER Measurement PDFDaniel AdebayoNo ratings yet
- Module 2 NotesDocument31 pagesModule 2 NotesSANJAY KUMAR SAMANTARAYNo ratings yet
- Unit - 1Document8 pagesUnit - 1Dhileepan KumarasamyNo ratings yet
- JONES e McCARTHY 2006Document10 pagesJONES e McCARTHY 2006Lucas Yagor GrenzelNo ratings yet
- Methods For Earthquake AnalysisDocument92 pagesMethods For Earthquake Analysisafcis100% (2)
- Trigonometric Leveling - Heights and Distances Problem (Two Exercises)Document1 pageTrigonometric Leveling - Heights and Distances Problem (Two Exercises)RadhaAnanthalekshmiNo ratings yet
- Instrumentation and Control ET ZC 341: BITS PilaniDocument24 pagesInstrumentation and Control ET ZC 341: BITS PilaniSujan AnnaiahNo ratings yet
- Governing EquationsDocument16 pagesGoverning EquationsVaishnavi SingreNo ratings yet
- Microplan - Katalog 2008 ENDocument10 pagesMicroplan - Katalog 2008 END.T.No ratings yet
- Vulnerability Assessment of Lifelines and Essential Facilities (WP06) : Methodological HandbookDocument35 pagesVulnerability Assessment of Lifelines and Essential Facilities (WP06) : Methodological HandbookJuan Carlos Jiménez PachecoNo ratings yet
- Design of Trail Bridges: Sag Calculation D TypeDocument4 pagesDesign of Trail Bridges: Sag Calculation D TypePramod RijalNo ratings yet
























































































Download as pdf or txt
You might also like
- CABLE TRAY-Refrigeration PipesDocument1 pageCABLE TRAY-Refrigeration Pipesmilindskulkarni2005@yahoo.co.inNo ratings yet
- Graph Theoretic Methods in Multiagent NetworksFrom EverandGraph Theoretic Methods in Multiagent NetworksRating: 5 out of 5 stars5/5 (1)
- Är Över Bättre Åvan FlygaDocument668 pagesÄr Över Bättre Åvan Flygaerikjohansson91No ratings yet
- Analysis & Design of Dolphin PilesDocument376 pagesAnalysis & Design of Dolphin PilesMotasem Matarneh100% (2)
- A Deep Learning Framework For Solution and Discovery in Solid MechanicsDocument24 pagesA Deep Learning Framework For Solution and Discovery in Solid MechanicseliwzNo ratings yet
- Transfer Learning EnhancedDocument18 pagesTransfer Learning EnhancedVictor RiveraNo ratings yet
- An Introduction To Programming Physics-Informed Neural Network-Based Computational Solid MechanicsDocument32 pagesAn Introduction To Programming Physics-Informed Neural Network-Based Computational Solid MechanicswNo ratings yet
- Deep Learning-Accelerated Computational Framework Based On PhysicsDocument51 pagesDeep Learning-Accelerated Computational Framework Based On Physicssohel ranaNo ratings yet
- Integrated Finite Element Neural Network I FENN For Non Local Continuum Damage Mechanics Response To PublisherDocument57 pagesIntegrated Finite Element Neural Network I FENN For Non Local Continuum Damage Mechanics Response To PublisherNealNo ratings yet
- Geometry Aware Physics Informed Neural Network SurDocument15 pagesGeometry Aware Physics Informed Neural Network SurThe SangeNo ratings yet
- 2021, Linka, Constitutive Artificial Neural NetworksDocument17 pages2021, Linka, Constitutive Artificial Neural NetworksaleromendeNo ratings yet
- Applications of Finite Element Method in Structural EngineeringDocument8 pagesApplications of Finite Element Method in Structural Engineeringdennis khisaNo ratings yet
- Stress Field Prediction in Cantilevered Structures Using Convolutional NeuralDocument10 pagesStress Field Prediction in Cantilevered Structures Using Convolutional Neuralyousefrezek95No ratings yet
- Physics-Informed Neural Network For Modeling Dynamic Linear ElasticityDocument18 pagesPhysics-Informed Neural Network For Modeling Dynamic Linear Elasticitydschoudhary369No ratings yet
- Finite Basis Physics-Informed Neural Networks (Fbpinns) : A Scalable Domain Decomposition Approach For Solving Differential EquationsDocument39 pagesFinite Basis Physics-Informed Neural Networks (Fbpinns) : A Scalable Domain Decomposition Approach For Solving Differential EquationsAryan SinghNo ratings yet
- Icsbe2016 252Document8 pagesIcsbe2016 252mansurreka7No ratings yet
- Ling 2016Document14 pagesLing 2016Rafael SalgadoNo ratings yet
- C PINNDocument27 pagesC PINNJoão Pedro OliveiraNo ratings yet
- On The Order of Derivation in The Training of Physics-Informed Neural Networks: Case Studies For Non-Uniform Beam StructuresDocument23 pagesOn The Order of Derivation in The Training of Physics-Informed Neural Networks: Case Studies For Non-Uniform Beam StructuresGogyNo ratings yet
- Physics-constrained deep learning for high-dimensional surrogate modeling and uncertainty qu-已压缩Document26 pagesPhysics-constrained deep learning for high-dimensional surrogate modeling and uncertainty qu-已压缩ex wNo ratings yet
- Mitra2021 Article DeterminationOfStableStructureDocument12 pagesMitra2021 Article DeterminationOfStableStructurepinakiNo ratings yet
- Application of Physics-Informed Neural Networks For Forward and Inverse Analysis of Pile-Soil InteractionDocument17 pagesApplication of Physics-Informed Neural Networks For Forward and Inverse Analysis of Pile-Soil InteractionNavoar FormaitNo ratings yet
- (W-8145) Designs To Improve Capability of Neural Networks To Make Structural PredictionsDocument9 pages(W-8145) Designs To Improve Capability of Neural Networks To Make Structural PredictionsNazmul SaqibNo ratings yet
- Preliminary Study On The Resolution of Electro-ThermalDocument15 pagesPreliminary Study On The Resolution of Electro-ThermalQuang Nguyễn MinhNo ratings yet
- 2023-Pre-Training Strategy For Solving Evolution Equations Based On Physics-Informed Neural NetworksDocument19 pages2023-Pre-Training Strategy For Solving Evolution Equations Based On Physics-Informed Neural NetworksmaycvcNo ratings yet
- Optimized Design of Parity Relation-Based Residual Generator For Fault Detection Data-Driven ApproachesDocument10 pagesOptimized Design of Parity Relation-Based Residual Generator For Fault Detection Data-Driven ApproachesDr.Suresh Chavhan -IIITKNo ratings yet
- Pinn F: A T - B F - F P - I N N: S Ormer Ransformer Ased Rame Work OR Hysics Nformed Eural EtworksDocument16 pagesPinn F: A T - B F - F P - I N N: S Ormer Ransformer Ased Rame Work OR Hysics Nformed Eural EtworksXiCheng WangNo ratings yet
- Renato - A Tutorial On Solving Ordinary Differential Equations Using Python and Hybrid Physics-Informed Neural NetworkDocument11 pagesRenato - A Tutorial On Solving Ordinary Differential Equations Using Python and Hybrid Physics-Informed Neural NetworkbakidokiNo ratings yet
- Physics Informed Neural Network SolutionDocument23 pagesPhysics Informed Neural Network SolutionAhmed RahmanNo ratings yet
- Icsbe2016 252Document8 pagesIcsbe2016 252MahindaNo ratings yet
- Modelling 05 00009Document27 pagesModelling 05 00009TnsORTYNo ratings yet
- On Self-Learning Finite Element Codes Based On Monitored Response of StructuresDocument19 pagesOn Self-Learning Finite Element Codes Based On Monitored Response of StructuresgunjanNo ratings yet
- A General Machine Learning-Based Approach For Inverse Design of One-Dimensional Photonic Crystals Toward Targeted Visible Light Re Ection SpectrumDocument18 pagesA General Machine Learning-Based Approach For Inverse Design of One-Dimensional Photonic Crystals Toward Targeted Visible Light Re Ection SpectrumyassinebouazziNo ratings yet
- Composites Part B: Shibo Yan, Xi Zou, Mohammad Ilkhani, Arthur JonesDocument11 pagesComposites Part B: Shibo Yan, Xi Zou, Mohammad Ilkhani, Arthur JonesLucas CarvalhoNo ratings yet
- Artificial Neural Networks in Structural Dynamics: A New Modular Radial Basis Function Approach vs. Convolutional and Feedforward TopologiesDocument16 pagesArtificial Neural Networks in Structural Dynamics: A New Modular Radial Basis Function Approach vs. Convolutional and Feedforward Topologiesvicto1111No ratings yet
- Journal of Statistical SoftwareDocument20 pagesJournal of Statistical Softwareuri20No ratings yet
- Structural Contr Hlth - 2021 - Caceres - A probabilistic Bayesian recurrent neural network for remaining useful lifeDocument21 pagesStructural Contr Hlth - 2021 - Caceres - A probabilistic Bayesian recurrent neural network for remaining useful lifeex wNo ratings yet
- Dynamic Link Prediction by Learning The Representatio - 2024 - Expert Systems WiDocument8 pagesDynamic Link Prediction by Learning The Representatio - 2024 - Expert Systems WiPhi MaiNo ratings yet
- Turbulence Using Neural NetworksDocument22 pagesTurbulence Using Neural NetworksrandNo ratings yet
- 1 s2.0 S009813542200196X MainDocument16 pages1 s2.0 S009813542200196X Maina1s2d3q1No ratings yet
- Neural NetworksDocument23 pagesNeural NetworkslulamamakarimgeNo ratings yet
- Combining The Finite Element Method and Artificial Intelligence in Manufacturing Modeling and OptimizationDocument40 pagesCombining The Finite Element Method and Artificial Intelligence in Manufacturing Modeling and OptimizationtrongndNo ratings yet
- Combinatorial Optimization and Reasoning With Graph Neural NetworksDocument61 pagesCombinatorial Optimization and Reasoning With Graph Neural Networksj3qbzodj7No ratings yet
- 10.1515 - Nanoph 2023 0292Document11 pages10.1515 - Nanoph 2023 0292yz-zhao20No ratings yet
- Deep Autoencoders For Physics-Constrained Data-Driven Nonlinear Materials ModelingDocument29 pagesDeep Autoencoders For Physics-Constrained Data-Driven Nonlinear Materials ModelingJerry GreyNo ratings yet
- Accepted Manuscript: Journal of Computational PhysicsDocument47 pagesAccepted Manuscript: Journal of Computational Physicsjuan carlos molano toroNo ratings yet
- 2023-Physics-Informed Recurrent Neural Networks and Hyper-Parameter Optimization For Dynamic Process SystemsDocument13 pages2023-Physics-Informed Recurrent Neural Networks and Hyper-Parameter Optimization For Dynamic Process SystemsmaycvcNo ratings yet
- 7 Differentiable Physics SimulatDocument5 pages7 Differentiable Physics SimulatimsgsattiNo ratings yet
- Fcteg 02 632417Document5 pagesFcteg 02 632417mda mpsNo ratings yet
- Schütt Et Al. - 2021 - Equivariant Message Passing For The Prediction ofDocument13 pagesSchütt Et Al. - 2021 - Equivariant Message Passing For The Prediction of1045013245leoNo ratings yet
- Topological Data Analysis For Network ResilienceDocument17 pagesTopological Data Analysis For Network Resilienceragnar.rpgNo ratings yet
- 1 s2.0 S0022509618310688 Main PDFDocument27 pages1 s2.0 S0022509618310688 Main PDFAymen DanounNo ratings yet
- Econometrica - 2021 - Farrell - Deep Neural Networks for Estimation and InferenceDocument33 pagesEconometrica - 2021 - Farrell - Deep Neural Networks for Estimation and InferenceGordon VanderbiltNo ratings yet
- Big Data Analytics For Grid ModernizationDocument2 pagesBig Data Analytics For Grid ModernizationJose Sebastian Rojas ArdilaNo ratings yet
- Solar Power Forecasting Using Deep Learning Techniques-3Document7 pagesSolar Power Forecasting Using Deep Learning Techniques-3Sarhro ELNo ratings yet
- Xingbaogao 2010Document12 pagesXingbaogao 2010ericksonyanambuNo ratings yet
- A Review of Artificial Neural Networks in The Constitutive Modeling of Composite MaterialsDocument15 pagesA Review of Artificial Neural Networks in The Constitutive Modeling of Composite MaterialsGiuseppeNo ratings yet
- 11.5-Machine Learning and EvolutionaryDocument18 pages11.5-Machine Learning and Evolutionaryergouwang305No ratings yet
- Physics Informed Neural Networks M Raissi P Perdikaris G E Karniadakis Download PDF ChapterDocument51 pagesPhysics Informed Neural Networks M Raissi P Perdikaris G E Karniadakis Download PDF Chaptergary.taylor799100% (7)
- Review On Composite - Laminated Material Analysis in Matlab Using Peizo - Electric Sensor and ActuatorDocument7 pagesReview On Composite - Laminated Material Analysis in Matlab Using Peizo - Electric Sensor and ActuatorSouha BaliNo ratings yet
- Bayesian Tomography Using Polynomial Chaos Expansion and Deep Generative NetworksDocument18 pagesBayesian Tomography Using Polynomial Chaos Expansion and Deep Generative Networksricit48236No ratings yet
- Back Propagation Neural NetworkDocument10 pagesBack Propagation Neural NetworkAhmad Bisyrul HafiNo ratings yet
- A Novel Neural Network For Nonlinear Convex Programming: Xing-Bao GaoDocument9 pagesA Novel Neural Network For Nonlinear Convex Programming: Xing-Bao GaoIvan JourdanNo ratings yet
- Lecture No. 2: Maxwell Equations and Special Relativity in AcceleratorsDocument22 pagesLecture No. 2: Maxwell Equations and Special Relativity in AcceleratorsEkky AndreanNo ratings yet
- Fundamentals OF Movement Skills V Fundamental Movement SkillsDocument6 pagesFundamentals OF Movement Skills V Fundamental Movement SkillsCharmaine JanorasNo ratings yet
- Hydrographs USDA SCSDocument50 pagesHydrographs USDA SCSdiebuisaNo ratings yet
- Principles of Structural Analysis and DesignDocument1 pagePrinciples of Structural Analysis and DesigngellianforniasNo ratings yet
- ReportDocument5 pagesReportspsingh_jmdNo ratings yet
- UBC Guide To BearingsDocument44 pagesUBC Guide To BearingsVirgilioNo ratings yet
- F1378 1479757-1Document5 pagesF1378 1479757-1Thaweekarn ChangthongNo ratings yet
- E X50 X100 X200Document2 pagesE X50 X100 X200Mahdi HajizadehNo ratings yet
- Comparison of Three Linearization Methods: Jonas Persson Lennart S OderDocument7 pagesComparison of Three Linearization Methods: Jonas Persson Lennart S OdernileshsmateNo ratings yet
- Design of PID Controller For The Modified Quadruple-Tank Process Using Inverted Decoupling TechniqueDocument5 pagesDesign of PID Controller For The Modified Quadruple-Tank Process Using Inverted Decoupling TechniqueMAURY SEBASTIAN MACIAS SANCHEZNo ratings yet
- Impulsing The Pendulum: Escapement Error: by Dr. George Feinstein (NY)Document21 pagesImpulsing The Pendulum: Escapement Error: by Dr. George Feinstein (NY)jmtiraNo ratings yet
- Selenium-75 Sources and Source Holders: ApplicationsDocument2 pagesSelenium-75 Sources and Source Holders: ApplicationsTanpreet SinghNo ratings yet
- Undrained Lateral Pile Response in Slopi PDFDocument12 pagesUndrained Lateral Pile Response in Slopi PDFAhmed RamadanNo ratings yet
- Inverted Pendulum NotesDocument36 pagesInverted Pendulum Notesstephanie-tabe-1593No ratings yet
- Investment Casting SurveyDocument16 pagesInvestment Casting SurveySamip SolankiNo ratings yet
- Formula Derivation: Stefan'S LawDocument7 pagesFormula Derivation: Stefan'S LawRitesh BhoiteNo ratings yet
- DTS0068 - PER Measurement PDFDocument5 pagesDTS0068 - PER Measurement PDFDaniel AdebayoNo ratings yet
- Module 2 NotesDocument31 pagesModule 2 NotesSANJAY KUMAR SAMANTARAYNo ratings yet
- Unit - 1Document8 pagesUnit - 1Dhileepan KumarasamyNo ratings yet
- JONES e McCARTHY 2006Document10 pagesJONES e McCARTHY 2006Lucas Yagor GrenzelNo ratings yet
- Methods For Earthquake AnalysisDocument92 pagesMethods For Earthquake Analysisafcis100% (2)
- Trigonometric Leveling - Heights and Distances Problem (Two Exercises)Document1 pageTrigonometric Leveling - Heights and Distances Problem (Two Exercises)RadhaAnanthalekshmiNo ratings yet
- Instrumentation and Control ET ZC 341: BITS PilaniDocument24 pagesInstrumentation and Control ET ZC 341: BITS PilaniSujan AnnaiahNo ratings yet
- Governing EquationsDocument16 pagesGoverning EquationsVaishnavi SingreNo ratings yet
- Microplan - Katalog 2008 ENDocument10 pagesMicroplan - Katalog 2008 END.T.No ratings yet
- Vulnerability Assessment of Lifelines and Essential Facilities (WP06) : Methodological HandbookDocument35 pagesVulnerability Assessment of Lifelines and Essential Facilities (WP06) : Methodological HandbookJuan Carlos Jiménez PachecoNo ratings yet
- Design of Trail Bridges: Sag Calculation D TypeDocument4 pagesDesign of Trail Bridges: Sag Calculation D TypePramod RijalNo ratings yet