Professional Documents
Culture Documents
1 s2.0 0141933179901418 Main
1 s2.0 0141933179901418 Main
Uploaded by
klismannsaavedraOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
1 s2.0 0141933179901418 Main
1 s2.0 0141933179901418 Main
Uploaded by
klismannsaavedraCopyright:
Available Formats
Memories in microprocessor
systems
In this series of articles Alan Clements describes the characteristics of
memory components, their timing diagrams and the address decoding
circuits which link memory components to a microprocessor's address bus
read/write memory, where data may be read from or written
This first article begins by defining some of the terms into the memory. This usage is incorrect because random
found in literature dealing with memory components, and access indicates only the property of constant access time
then describes the characteristics of the most frequently
and has nothing to do with the ability of the memory to
encountered memory components. The interpretation of
modify its data. In order to be consistent with other
the timing diagram of a popular memory component is literature, 'random access memory' means 'random access
examined together with the timing diagrams of a micro- read/write memory' throughout this article, unless other-
processor. The problems of matching the two timing
wise stated.
diagrams are illustrated by choosing a Texas Instrument's
memory and a Motorola 6800 microprocessor. Serial access
In a serial access memory the time taken to access data is
Before dealing with the types of memory c o m p o n e n t suitable
dependent on the physical location of the data within the
for a microprocessor memory system it is helpful to define a
memory. The data moves past some read/write device so
few terms. that in accessing any given memory cell, the waiting time
Memory cell depends on how long that cell takes to move to the read/
A memory cell is the smallest unit of information storage, write device. Examples of serial access memories are
and can hold a single logical zero or logical one. magnetic tapes, magnetic discs, shift registers and magnetic
bubble memories.
Access time
Volatile memory
The access time is one of the most important parameters of
any memory component, and is the time taken to read data Volatile memory loses it contents when the source of
from a given memory location, measured from the start of a power is removed. This applies to most semiconductor
read cycle initiated by one or more of the memory memory, where the data is stored as a charge on a capacitor
component's input lines changing logical state. The access or as the state of a transigtor in a bistable circuit.
time is made up of two parts; the time taken to locate the Read only memory (ROM)
required memory cell (address decoding time} and the time A read only memory is such that its contents cannot be
taken for the data to become available from the memory altered under normal operating conditions. True read only
cell. Because most semiconductor memories have identical memories are by definition nonvolatile, but pseudo read only
read and write access times, the access time of a memory memories may be realized by using a read/write memory
component is normally taken to mean the read or write with the write function disabled. In popular usage 'read only
access time. memory' has come to mean read only random access
Random access memory. It is, of course, possible to have read only serial
When a memory is configured so that the access, time of any access memories.
cell within it is constant (neglecting small variations caused
Static memory
by propagation delays in the address d e c o d e r / a n d is
independent of the actual location of the cell, the memory Once data has been written into a static memory cell, it
is said to be random access memory (RAM). In practice this remains there until altered by overwriting with new data or
means that the CPU does not have to worry about the time if the memory is volatile by removing the power. Static
taken to read a word from memory (or write a word to semiconductor memory cells usually employ crosscoupled
memory}, because all read/write cycles will have the same transistors to hold the data.
duration. The term RAM is usually employed to describe Dynamic memory
In a dynamic memory the data is stored in the form of a
Department of Computer Science, Teesside Polytechnic,
Middlesbrough, Cleveland TS1 3BA, UK
charge on a capacitor. Because capacitors are not perfect,
vol 3 no 5june 79 0 1 4 1 - 9 3 3 1 / 7 9 / 0 5 0 2 2 7 - 0 9 $02.00 © IPC Business Press 227
fcc (,5V) Electrically alterable read only memory (EA ROM)
The EAROM is a programmable read only memory which
can be programmed and erased electrically without
removing it from its normal location. The EAROM may be
Row thought of as a nonvolatile RAM, although the signal level
select requirements of an EAROM usually differ between read and
write operations, unlike those of a normal RAM.
,o=o v
I Gnd
I/O "I"
=
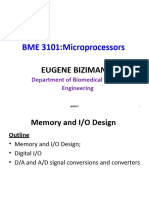
STATIC RANDOM ACCESS MEMORY
Figure 1. Static memory storage cell
In cases where a microprocessor system is used as a general
purpose digital computer, the bulk of the system memory is
tile charge gradually leaks away and the data is lost. likely to be either static or dynamic read/write random
Additional circuitry is thus needed periodically to restore access memory, because a wide variety of different programs
the charge on the capacitors in an operation known as will be run on the computer. Where a microprocessor is used
memory refreshing. in a dedicated application, e.g. a chemical process controller,
Semistatic (edge-activated) memory the bulk of the memory is more likely to be read only
memory because the program does not have to be changed.
A semistatic memory array uses fully static memory cells Static RAM is widely employed in microprocessor
to store data, but has address decoding and control circuits applications largely because it is very easily implemented.
which operate in a dynamic mode. They are clocked by Unlike dynamic memories, static memories do not require
their control inputs or by transitions on the address bus. any action to refresh their contents periodically. Figure 1
A semistatic memory consumes less power than a fully shows the circuit diagram of a typical NMOS static storage
static memory of the same size. cell. The most significant feature of this cell is that six
Programmable read only memory (PROM) transistors are required to store each bit of data. Dynamic
A programmable read only memory is a type of ROM which memory cells store their data as a charge on the inter-
can be programmed by the user (as opposed to the electrode capacitance of a single transistor, and therefore
manufacturer) once and once only. require fewer transistors per cell. Because of this a dynamic
memory of a given chip size can always store more data than
Erasable programmable read only memory (EPROM) a static memory of the same chip size. Furthermore the
An erasable programmable read only memory can be average power per bit consumed by a dynamic memory is
programmed by the user, have its contents erased and then less than that of an equivalent static memory.
be reprogrammed. The erasure of data from an EPROM From the above remarks it would appear that static
almost always necessitates its removal from the normal memories are inferior to dynamic memories. Although this
circuit location. is often true for large memory systems, the extra cost and
Table 1. Characteristics of some static RAMs
Total Power (mW) Access
Static RAM type Arrangement Pins
bits typ max time (ns)
Intel 2102A 1024 1024 x 1 165 275 350 16
Intel 2101A 1024 256 x 4 175 275 350 22
Intel 21t 1A 1024 256 x 4 300 350 18
Intel 2114 4096 1024 x 4 710 450 18
Intel 2147 4096 4096 x 1 500 90 18
TI TMS4044-45 4096 4096 x 1 275 495 450 18
TI TMS40L45-45 4096 1024 x 4 250 370 450 18
Motorola MCM6810A 1024 128 x 8 350 450 24
AM1-34025-4 1024 1024 x 1 265 45 16
EMM/SEMI 35391 2048 256 x 8 394 400 22
Mostek MK4118-4 8192 1024 x 8 400 250 24
228 microprocessors and microsystems
complexity of dynamic memory refresh circuits make static
memory look much more attractive in small systems.
Static random access memory chips, built with NMOS
T
technology, are available in several configurations. As
semiconductor technology develops new memory chips with
greater capacities appear. This has the effect of reducing the Row select
price of the o!der chips of lower capacity. In Table 1 several
static RAM chips are described in terms of the number of
Bit line
bits per chip, the arrangement of the data as words x bits
per word, the number of pins, the access time and the Figure 2. Dynamic memory storage cell
power dissipation.
Some chips have a common data input/output To perform a refresh cycle, additional logic is usually
arrangement while others have separate input and output necessary to multiplex the address lines between the CPU
pins. A few chips have a power down facility which allows address bus and the refresh address counter, which must
the data to be retained if the power supply voltage falls to cycle through the 64 row addresses. Further logic is
not less than 2.4 V. Such an arrangement enables batteries required to synchronize the refresh operation with the CPU,
to provide the relatively low power needed to retain the either by slowing down or halting the CPU in a DMA type
memory data during a temporary power failure. The operation or by executing a refresh cycle whenever the CPU
TMS4046 and TMS4047 chips take power conservation is not using the system bus. If tile memory refresh cyc!e
during power down one step further. These chips have two d o e s n o t involve the CPU, it is said to be transparent because
power supply pins, one for the address decoding, control the dynamic memory appears to the CPU as static memory.
and buffer circuits, and one for the memory array itself. Just as there is a wide range of static memory chips,
Under power down or stand-by conditions only the power dynamic memory chips are available in a variety of formats.
supply to the memory array is required at Vcc ~ 2.4 V. Popular dynamic memory sizes are 4k x 1 and 16k x '1
This reduces the power dissipation from 250 mW when and the 64k x 1 chip is now becoming available. Because
active to 12 mW when powered down. much of the cost of a memory component is in the pack-
The majority of memory chips have a single enable or aging rather than the silicon chip itself, there has been a
chip select input. This is used to switch on the three state tendency to put 4k and 16k dynamic memory chips in
data buffers in a read cycle and to permit data to be stored 16-pin DIL packages. Such a small package cannot accom-
in the chip in a write cycle. The MC6810 is an unusual modate all the address lines necessary to access a given
memory component because it has six chip select inputs, memory cell To get round this difficulty, the address lines
four of which are active low and two active high. This chip are multiplexed between the row and column addresses of
has been designed to be used in circumstances where the any memory cell. Two new pins are required to implement
read/write memory requirements are low and memory the address multiplexing. These are the row address strobe
decoding circuits can be omitted by using the high order (RAS) and the column address strobe (CAS), which are used
address lines (Als, A14 • •. etc.) to select the RAM. The to indicate that the address pins hold the address of a row
subject of address decoding is dealt with in detail in the and a column of a cell in the memory array respectively.
second article in this series. The block diagram of a typical 4k dynamic RAM, the
2104A, is given in Figure 3.
D Y N A M I C RANDOM ACCESS MEMORY A particular problem associated with dynamic memories
The dynamic memory cell uses a single transistor to store is that of power supplies. Not only do many dynamic RAMs
data in the form of a charge on a capacitor. Figure 2 require three separate power supplies (12 V, 5 V and -5 V)
illustrates this basic simplicity. Because the charge on the but the current requirements are transitory. The average
capacitor gradually leaks away, any data stored will be lost power consumed by a dynamic RAM is much lower than that
after several milliseconds. Most dynamic memory chips have of a corresponding static RAM. However, during a memory
a guaranteed data retention period of 2 ms. In order to avoid access cycle (read/write/refresh) the current requirement of
loss of data the charge on the capacitor must periodically be a dynamic RAM may increase by 60 mA in 5 - 1 0 ns. This
restored by rewriting the data into the memory cell in an :urrent transient corresponds to a current demand increasino
operation known as refreshing. at the rate of more than six million amps per second. A wel,
The majority of dynamic RAMs have been constructed so designed dynamic memory system requires careful attention
that the memory refresh operation is relatively easy. The to the layout of the memory printed circuit board and the
dynamic memory chip is arranged as an array of rows and selection and positioning of decoupling capacitors.
columns, so that a typical 4k chip has 64 rows and 64 Dynamic memory components are best suited to large
columns. It is not necessary to refresh each memory cell memory systems where they are much more cost effective
individually; a whole row of memory cells is refreshed in a because of their cost, package count, average power
single operation (refresh cycle). A typical memory refresh consumption and access time. (Static RAMs can be
cycle involves little more than a pseudo read cycle, i.e. a obtained with access times lower than dynamic RAMs,
read operation is executed while the chip is deselected. but commonly available dynamic RAMs are often faster
vol 3 no 5 june 79 229
Write enable D Strobe -I ~ " • When a microprocessor is first supplied with power, it
Di. either executes a jump to a particular memory location,
or loads its program counter with the contents of a
particular memory location. For example, the MC6800,
when reset, loads its program counter with the contents
i I of locations FFFF and FFFE. Hence in an MC6800
system some memory must exist at FFFE/F (or at least
respond to these addresses). This memory usually holds
-4 a __]_ Output
64 senseamplifiers•
C I the system's monitor or operating system, which must
Ad~ore-'~s I/0 gating ~ latchand [ be retained after the power supply has been switched off.
Clearly what is required is nonvolatile memory, and RaM
---64 -1 is used because it is, by its very nature, nonvolatile.
• Programs which are not normally modified may be held
4096-: bit
storage array in RaM to save the time lost in loading them from paper
vBeC-SV) tape, cassette, or disc every time they are required. Such
VDO(*12V) programs may be part of the operating s'ystem itself or
Vcc(+5V) interpreters for languages like as BASIC. Compilers are
~'Gnd
I ~ q CIoCkno.
lgenerator [ not usually held in RaM because, unlike interpreters,
RAS they may be discarded after they have compiled a
program.
Figure 3.. Internal arrangement o f the 2104A 4096 x 1 bit
• In order to speed up mathematical computations, RaMs
dynamic R A M
are often used to hold the values of mathematical functions.
than commonly available static RAMs). In small systems or For example, a 1 k RaM can hold 1024 values of sin(x)
systems constructed by the microprocessor enthusiast, the where x is in the range of 0 ° to 90 o giving a resolution
problems associated with the refreshing of dynamic of approximately 0.1 o. Interpolation can be employed
memories plus their power supply requirements justify the to generate values of sin (x) for intermediate values o f x .
use of static memories. When used in this way the RaM becomes a function
The designers of dynamic memories have realized that if generator with the address lines as the input and the data
they are to capture a share of the memory market for small lines as the output.
microprocessor systems, they must overcome some of these • A RaM is used in raster scan display systems to convert
limitations. Mostek has been one of the first companies to the binary character code, usually ASCII, into a pattern
produce a dynamic memory with the advantages of both of dots which are displayed on a television screen.
conventional static and dynamic memories. The MK4816(P) • If a table of addresses of a 2 n word by m bit RaM is
series of dynamic memories is byte organized as 2048 x 8 drawn with the contents of the corresponding memory
bits, unlike most dynamic memories which are bit organized locations written alongside the addresses, the result is the
truth table Of a logic element with n inputs and m outputs.
as 4096 x 1 or 16384 x 1 bits. The MK4816-3 has an access
RaMs may therefore be used to replace T T L logic
time of 200 ns, a cycle time of 360 ns and uses a single 5 V
power supply. Its power requirement is only 150 mW, and elements in applications where complex logic functions
it can be used in a power down mode where it needs only are required. High speed bipola'r RaMs are normally
25 mW to retain data. A special feature of the MK4816 is found in this application.
that it can be refreshed in the normal way (128 refresh cycles
in 2 ms), or the system refresh logic can be eliminated by Mask programmable R O M
using the MK4816's own internal refresh control logic. Mask programmable RaM is programmed at the time of its
manufacture by modifying one of the masks used in the
READ ONLY MEMORY photolithographic process by which LSI devices are made.
Data in read only memories can be accessed in a read
operation but cannot be altered in a normal write cycle.
Floating Controlgate Silicondioxide
Although RaM is often regarded as a special type of RAM gate Si 02
where the data is frozen permanently in the memory cells,
or cannot be altered without physically removing the RaM
component from the memory system, an ordinary read/
write random access memory can be used as a RaM merely
by disabling the write function, or by generating an
interrupt whenever an attempt is made to write to a
(,n.,
~" "". . . . . . . . -~/A
p- fype substrate
, o.,)
p/,.~. . . . . ; .... I
protected area of RAM.
Read only memory has several applications in a micro-
pr~essor system. Some of the most important applications
are as follows: Figure 4. EPROM m e m o r y cell structure
230 microprocessors and microsystems
Because of the great expense involved in making and testing V¢¢
anew LSI device, the mask programmable ROM is cost
effective only when produced in large quantities. Mask
programmable ROMs are almost always byte oriented and Row
are available in sizes of 1 k bytes to 8k bytes.
Most of the applications involving a mask programmable
ROM are in high volume dedicated systems where the high
cost of developing and testing the ROM can be spread over
many systems. In small microprocessor systems used either Fu
as development tools or as hobby computers, the mask
programmable ROM often appears in the form of a Column
monitor, which is the microprocessor's 'operating system',
and is used to load other programs, modify them (if
necessary) and then execute them. An example is Motorola's
Figure 5. Fusible link FPROM ceil
MIKBUG, which, although developed for the MEK6800 DI
development system, has become a standard for most
MC6800-based hobby computers. in the microprocessor system and transport it to a UV
light eraser. After erasing the EPROM it must be
EPROM reprogrammed, an operation which is frequently carried
out in a special programming machine. It is possible to
A more useful type of ROM, from the small scale user's program the EPROM in situ, but it is not usually worth
point of view, is the erasable and programmable read only the effort of providing a programmer in every micro-
memory (EPROM). This may be programmed, erased and processor system
then reprogrammed by the user. Figure 4 illustrates the
basic principle of the EPROM memory cell, which consists The early EPROM's (e.g. the 1702) were relatively small
(:256 bytes) and required several operating voltages. Currently
of a single field effect transistor whose gate is totally
isolated from the rest of the circuit by being embedded in available EPROMs can be obtained in I k x 8, 2k x 8 and
an insulating layer of silicon dioxide. The gate is then said to 4k x 8 configurations, and operate with a single 5 V supply.
be floating'. Above the floating gate is a second gate, the
control gate, which is connected to the row decoder
Field programmable R O M
circuits in the memory array. The cell is programmed by The field programmable read only memory (FPROM) is a
grounding source and substrate and applying a high voltage bipolar device which may be programmed only once by the
(26 V) to the control gate. The potential difference user. A typical FPROM (usually abbreviated to PROM) uses
between the control gate and the substrate causes electrons a single bipolar transistor memory cell. In the emitter of the
to be injected through the silicon dioxide and become transistor is a fuse consisting of a link made from one of
trapped on the floating gate. This device is remarkable four materials, nichrome, polycrystalline silicon, platinum
since the charge will remain on the floating gate for many silicide or titanium tungsten. A cell of a fusible link FPROM
years because of the almost perfect insulating properties is illustrated in Figure 5.
of the silicon dioxide. The effect of the charge on the During programming the fuses are blown (made open
floating gate is to inhibit the flow of current between circuit) by passing a large current pulse through the transistor
source and drain when the transistor is selected by the by means of the row and column decoding circuitry. When a
appropriate column address. Thus the trapped charge memory cell is selected in a read cyclc~, the row input to the
determines whether the transistor is in the on or off transistor's base will turn it on, and the column line will be
state when selected, and hence whether a 0 or 1 is stored in pulled towards Vcc i f the fuse is intact, o r l e f t floating if the
the cell. fuse has been blown.
The memory cell may be erased by illuminating it with Bipolar FPROMs are often characterised by relatively few
ultraviolet light, at a wavelength of 253.7 nm. The UV bits per chip and very small access times (50 ns). The FPROM
radiation imparts sufficient photon energy to the trapped is often used in conjunction with bit slice technologies where
electrons to enable th'em to escape through the silicon very high speed processing is required. When FPROMs are
dioxide to the substrate. There are three consequences of found in microprocessor systems they are frequently employed
this mode of erasure: as address decoders, where a single 16-pin 32 x 8 FPROM can
• to illuminate the cell with UV light, a quartz window save several TTL packages.
must be put in the package , directly above the chip.
This increases the cost of packaging TIMING DIAGRAMS
• 0ecause the whole chip is illuminated all cells are A glance at the data sheet of any memory component always
simultaneously erased. It is not possible to modify an reveals one or more timing diagrams. A timing diagram shows
EPROM selectively the temporal relationship between the events which take
• because UV light sources are expensive and bulky, it is place during a read'or write cycle. It can also be regarded as
necessary to remove the EPROM from its normal place a cause and effect diagram, where, for example, the arrival
vol 3 no 5 june 79 231
l¢(rd) are either semistatic or else have clocked latches which make
vaid
stringent demands on the timing arrangements.
In Figure 6 the timing diagram of the address bus appears
Address VIH~
VrL Address as two parallel lines which cross over at points A and B. The
Chip VIH
select
g
VlL
--~~ use of two parallel lines is a convention which means that
the logic levels may be either high or low. In the case of the
address bus, it is highly probable that some address lines are
in the logical one state while others are in the logical zero
Data VIH state.
output V~L I
It is not the actual state of the address bus that is of
interest, but the time at which the contents of the address
bus become stable for the duration of the current memory
Figure 6. Read cycle timing diagram of the TMS40L45
static RAM access cycle. At point A in Figure 6 the contents of the
address bus have bcome stable, and this point is used as a
of a new address is the cause and the output of new data is reference for some of the timing measurements. Because
the effect. Anyone contemplating connecting a particular logic transitions are never instantaneous, it is usual to
memory chip to a microprocessor system bus must first represent a change of state by a sloping line, and to mark
determine whether the timing requirements of the micro- the point (or points) from which measurements are made.
processor and memory are compatible. In most areas of digital electronics the reference points are
taken as 10% and 90% of the upper logic level~ Sometimes
Read cycle timing diagram the reference levels are taken as VIL and VIH on inputs, and
VOL and VOH on outputs.
AF! symbols and abbreviations in Figure 6, which shows the Between points A and B the address bus contains the
timing diagram for the read cycle of a TMS40L45 static address of the location in the RAM which is to be read.
RAM, are those used by Texas Instruments in their own
During this time the address must not ch.ange. The
literature. The values of the parameters defined in Figure 6 difference between points B and B' is that at B the
are listed in Table 2 for the 450 ns version of the RAM. contents of the address bus have started to change to the
It is most unfortunate that semiconductor manufacturers new values which will be used in the next cycle. It is not
use their own individual terminology in describing their until point B' that the new contents of the address bus
products: it is often a tedious task-to match up the timing become valid once more. The time between point A and
diagram of manufacturer A's microprocessor with the B' is the cycle time for a read operation, and is quoted as a
timing diagram of manufacturer B's peripheral. minimum of 450 ns. That is, a microprocessor must not
The specification of the TMS40L45 describes it as a initiate a second read cycle until at least 450 ns after the
fully static RAM requiring no clocks or timing strobe. This start of the current read cycle. The TMS40L45 has a R/W
is an important feature because some memory components input which does not appear in its read cycle timing
diagram. It must therefore be assumed that the R/W input
Table 2. Timing parameters of the TMS40L45 to the RAM is in the logical one state for the entire
duration of the read cycle.
Symbol Parameter Value (ns) Consider now the data o u t p u t of the TMS40L45. Up to
rain max point E, the contents of the data bus are represented as a
single line midway between the two logic levels. This
t c (rd) read cycle time 450 convention signifies that the data bus is floated, or in the
high impedance state. The internal data bus drivers of the
ta(s) access time from chip select 120 TMS40L45 are in the high impedance state until point E,
tpvz,5 output disable time after chip select high 100 which occurs t a (S) s after point C, at which the chip select
output data valid after address change 10 input becomes active. The time between points A and E is
tpvx
ta(A)s , and is the time taken from the point at which the
ta(A) access time from address valid 450 contents of the aci(tress bus are first stable to the time at
tc(wr) write cycle time 450 which the contents of the data bus first contain valid data.
ts. (A) address set up time 0 This time is quoted as having a maximum value of 450 ns.
That is, the data should be valid no later than 450 ns after
tw(W) write pulse width 200 the start of a read cycle. _
th(A) address hold time 20 The chip select input S , must make its active low
transition at least ta(S) s before the output data is required.
ts. (S) chip select set up time 200
The timing diagram says nothing about the relationship
tsu(D) data set up time 200 between point C and point A. This implies that S- can
th(D) data hold time O~ assume its active low state at any time, as long as the ta(S )
reqQirement is satisfied. This is a consequence of the static
232 microprocessors and microsystems
nature of this RAM, and implies that data is continually tc(wr) =.
being accessed from the RAM, and that all the chip select
input does (in a read cycle) is to enable the three state data AddressVIH 7 " ~ ' ~:,~//'//~y'//
output buffers. If S- goes low early in the read cycle, data VlL~-~JA~tsu(A) , t.(W) , th(A) "]B " "
will be put on the data bus no later than ta(5) s after the w~ v,. i'~-~"
active transition of S-. However, the data will not be valid enable Vl ~-- -- -~' TM
until ta(A ) s after the address has become stable (point A). • _J°
At the ei~d of the read cycle, point B, the contents of the v,. L /F
address bus are in the process of changing to their new
values. Because the memory dOes'not respond instantly to
Input VIH /
changes on the address bus, the contents of the data bus are data ViE y/',///////S///'//"~Data validH ~
still valid until point F, which occurs not less than tpvxs
after point B. This is often called the guaranteed data hold
Figure 7. Write cycle timing diagram of the TMS40L45
time of the memory. After point F, the data bus drivers
static RAM
are still in the low impedance state, but the data is no
longer valid. This situation is often indicated by shading the
region between the two logic levels.
At point D the chip select input makes its low to high Start of cycle [_ tcycle = IO00ns
transition, signalling that the chip's data bus drivers can
\
. . . . .
once more be switched into the high impedance state, It is ~1 0 4 V ~ v~-O 6v f
04V
not until point G, tpvz~ 5 s after point D, that the data bus
returns to its high impedance state, and the memory /
component is deselected.
24v --<<d/
Write cycle timing diagram R/~
_ tAD -
The write cycle timing diagram for a TMS40L45 static RAM
is given in Figure 7. This is a little more complex than the Address i ~I.~-<20V
tAH
from CPU # ' ~ 08V
corresponding read cycle timing diagram, because the action
of the write enable (W) input must also be considered. No
harm can be done to the stored data when W is high, as I ~,. tocc .~ tOSR ~ tH
reading a memory cell does not affect its contents, no I
matter how many times a read cycle takes place , but ifW Data from 2OV.~,~'~
=-7
goes low when the contents of the address bus or data bus memory O.8V~-- i Data valid
are not valid, there is a danger of writing erroneous data
into the memory.
Figure 8. Read cycle timing diagram of the MC6800 CPU
Between points A and B, in Figure 7, the contents of the
address bus are stable. The duration AB is called the write
cycle time, tc(wr), and must not be less than 450 ns for a transition any time after it has satisfied the condition that
tsu(5 ) i> 200 ns. However, should S remain low while W is
TMS40L45. The write enable input to the RAM, W, makes
high, a rea~l cycle will occur and the RAM's data bus drivers
its high to low transition at point C. The time between the
will assume a low impedance state.
point at which the address bus is stable (A) and the point at
The system data bus must contain the contents of the
which W goes low (C) is defined as tsu(A). The minimum
data to be written into the currently addressed memory cell
value of tsu(A) is quoted as 0 ns. At first sight this may
from point G to point H. Between G and H the data bus
appear a little strange. What it really means is that W may
make its high to low transition only after the contents of must be stable. Point G must occur at least tsu (D) before
the address bus have become stable, and not before. In order the low to high transition of W at G. This period is known
to successfully execute a write cycle, W must remain low as the data set up time. After point D the data must be held
for a minimum of tw(W) s, the writa pulse width, before stable for another th(D) s, the data hold time.
rising to a logical one state at point D.
Point D is the time at which W has passed the 10% VOH Microprocessor timing diagram
level and point D' is the time at whicb W has reached 90% The designer of a microprocessor system is not simply
VOH level. It is important to note that D' must occur at interested in the timing diagrams of memory chips alone,
least th (A) s before the contents of the address bus begin to but in the relationship between them and the timing
change at point B. The time between D'and B th(A), is diagrams of the microprocessor.read/write cycles. Figures 8
known as the address hold time. and 9 give the timing diagrams of the MC6800 read and
The active low transition of the chip select input_, S, must write cycles respectively, and Table 3 defines the symbols
occur at least tsu(S) s before the rising edge of the W input used in these diagrams. Note that the style of these
at point D. The chip select input may make its low to high diagrams differs slig.htly from those of Texas Instrument's
vo/ 3 no 5 june 79 233
tocle = I 0 0 0 ~ until the memory component has responded by outputting
data. The data must be valid no later than the maximum
value of tacc + tADS after the start of a cycle (i.e. 270 +
530 = 800 ns). Once the data from the memory has become
valid, the contents of the data bus must remain stable for
at least tDS R s, which is known as the data setup time. At
the end of a cycle the data must remain valid for a further
period of not less than t H s (the data hold time) after the
falling edge of ~b:. At the end of a write cycle, signified by
the falling edge of ~2, the CPU maintains the contents of
the data bus for at least a further t H s (the data hold time).
VMA
Data Combined timing diagram
from
CPU -- - -- t D ~w Data val;d In Figure 10 the read cycle timing diagrams of the MC6800
CPU and of the TMS40L45 static RAM are combined. The
job of the microprocessor systems designer is to determine
whether or not this timing diagram violates any of the
Figure 9, Write cycle timing diagram of the MC6800 CPU
restrictions set out in the MC6800 and TMS40L45 data
sheets.
Table 3. Timing parameters of the MC6800 CPU The start of a CPU memory access cycle begins at A, with
the rising edge of the q~ clock pulse. It is not until B, after a
Symbol Parameter Value (ns) delay of T 1 s, that the contents of the address bus first
become valid. In Figure 10 the values of VMA and R/~/
min max outputs of the MC6800 are identical. The address inputs to
tr clock pulse rise time 100 the RAM do not become valid until point C, 73 s after point
tA P address delay 270 B. This additional delay is because of the address buffers.
The address lines from the CPU are buffered onto the system
tat t address hold time 30 bus at the CPU card and buffered from the system bus at
tH data hold time 10 the memory card. The worst case delay of two 74LS244
buffers in series is 40 ns.
tuc c peripheral read access time 530
The chip select input to the RAM, S, makes its high to
t [~.sR data set up time (read) 100 low transition at point D, Ts s after point C. The chip
toDw data delay time (write) 225 select delay, Ts, is due to the address decoding circuit,
which generates S from the high order ~ddress lines (Als
to A12 for a 4k block of RAM). A typical value for Ts is
40 ns, but the actual value depends on the type of address
RAM. Moreover Motorola and TI each use their own
decoding circuitry used. Fortunately, the value of T5 is
symbols in their respective timing diagrams. The fact that
unimportant in most applications because it is very much
each semiconductor manufacturer describes its products in
shorter than the access time of the RAM. At point E the
its own way using its own terminology makes life very
effect of the active low transition on the RAM's chip
difficult for the microprocessor systems designer.
In Figure 8 the read cycle timing diagram of a MC6800 t cycle = I O00ns
CPU with a 1000 ns cycle time (fclock = 1 MHz) is given.
The CPU puts the values of R/W, the current address, and \
VMA (valid memory address) on to the system bus no later
than tAD s (270 ns) after the start of a clock cycle. The
/ \
contents of all these lines remain constant until at least t.AHS'
(30 ns) after the end of a clock cycle, signified by the rising Address
edge of q~a. (To be precise, tAH is measured from the 0.4 V from CPU
point on the rising edge of ~1 to the 0.8 V or 2.0 V points Address
at memory
on the address lines which represent the maximum value of
Chip select
VIL and the minimum value of VIH respectively). At the
start of 'a read cycle the data bus will be inahigh
impedance state, and remain in that state until the three
state data bus drivers in the memory are turned on. The
time at which this occurs is unimportant as long as valid
at memory
Memory ddto
output
miTT~8@
d
data is on the data bus no later than 530 ns (the maximum
value of the peripheral read access time tacc) after the
contents of the address bus have become stable. Of course, Figure 10. Read cycle timing diagram of the MC6800 CPU
the data at the input terminals to the CPU will not be valid related to the TMS40L45 static RAM
234 microprocessors and microsystems
select input is to turn on its three state data bus drivers. operate satisfactorily under these conditions.
Although data has now been put onto the data bus, it is • 1-he RAM has a data hold time of Ta (T8 = Tpvs) s
not yet valid. The contents of the data bus first become which is specified as not less than 10 ns.
valid at point F, which occurs at T1 + T3 + T~ s after the
Although the data remains valid until point I, which more
start of a clock cycle. Using the worst case values of TI,
than satisfies the CPU's data hold time requirement, the data
7-3, 7-7, point F occurs no later than 270 + 40 + 450 =
bus is not floated again until point J. In a well designed
760 ns after the start of a read cycle.
system, no other device will attempt to use the data bus
The MC6800 requires the contents of the data bus to be
until after point J, otherwise a clash between two bus drivers
valid for at least 100 ns (tosR) before the end of the ~2
(in their low impendance states) occurs. Fortunately, many
active high clock phase. At a clock cycle time of 1000 ns,
6800-based systems use the active high phase of the ~2 clock
the data (using the above figures) is valid approximately
to control data bus drivers, which avoids any data bus
240 ns before the rising edge of ~2 - The data set up time
contention problems resulting from memory access cycles
requirement of t~he MC6800 is therefore satisfied by a wide
extending into the first few ns of the following ~1 clock
margin.
phase.
The only other critical timing requirement of an MC6800
In the above example delays due to data bus drivers have
reaa cycle Is that the data should remain valid for t H s (the
not been considered in order to keep the complexity of
data hold time) after the falling edge of q~2. The value of
Figure 10 to an acceptable level. In practice Schottky TTL
t n is given as not less than 10 ns. No problems are presented
bus drivers and receivers seldom cause problems in NMOS
here for the following reasons:
microprocessor systems because the propagation delays
• The address of the CPU is held for T2 s(T2 = tAN) after through these buffers are very much smaller than the clock
the rising edge of q~l- As the minimum value of T2 is cycle times of the CPUs. Care must be taken, however, in
30 ns, the data cannot begin to change until after the systems wher e several buffers are connected in series and
address has changed. That is, the data will be valid for.at these buffers are controlled by combinational logic elements
least 30 ns after the falling edge of ~2. Note that the which also introduce additional timing delays into the
falling edge of ~2 occurs before the rising edge of q~l system. The cumulative effect of these delays becomes
• Although the address at the CPU begins to change at significant when the access time of the RAM is dangerously
point G, the address at the input to the RAM does not close to the time for which the CPU maintains.a valid
change until at least 7-4 s later. 7-4 is the minimum delay memory address on its address bus.
through the address buffers, and is not to be confused Many 6800-based microprocessor systems require RAMs
with T3, which is the maximum delay through the with a considerably lower access time than the above
address buffers. Whether the maximum or the minimum example would suggest. Although the CPU puts out an
propagation delay through a buffer (or any other digital address, VMA and R/~/ signals during the ~1 clock phase,
circuit) is of interest depends on the effect of that delay the address decoding arrangements are often designed to
on the system. For example, at the beginning of a cycle employ ~2 as an enabling signal, reducing the time for
when the address first becomes valid the maximum which the address is valid (i.e. at the input to the RAM) by
value of the delay is used because this give a worst case approximately 200 ns.
result. At the end of the cycle when the address shodld The above exercise must also be carried out with the
linger (to satisfy the address hold times of memory microprocessor and the RAM write timing diagrams to see
components) the delay through the buffer can be whether they too are compatible.
assumed to be at its minimum. The designer of any
system must assume that all components will, collectively, In next month's article the techniques which el~abl'e memory
act against him by being at the end of their tolerance components with a capacity of, say, 1 k bytes to be interfaced
range which will cgause the most trouble. The designer with a microprocessor which has the ability to address 64k
must therefore choose components which will still locations willb~ discussed.
vol 3 no 5 june 79 235
You might also like
- Student Course Book - NICE Sentinel Fundamentals R6.12 PDFDocument414 pagesStudent Course Book - NICE Sentinel Fundamentals R6.12 PDFTulika rajNo ratings yet
- 049 Hadoop Commands Reference Guide.Document3 pages049 Hadoop Commands Reference Guide.vaasu1No ratings yet
- Semiconductor Memories/Data Storage Devices 1: V S Imbulpitiya Instructor (Electronic) Technical Collage GampahaDocument20 pagesSemiconductor Memories/Data Storage Devices 1: V S Imbulpitiya Instructor (Electronic) Technical Collage GampahaVindya ImbulpitiyaNo ratings yet
- Microprocessor & Microcomputer: Medical Instrumentation Techniques EngineeringDocument9 pagesMicroprocessor & Microcomputer: Medical Instrumentation Techniques EngineeringIbrahim YousifNo ratings yet
- Memory System Design PDFDocument13 pagesMemory System Design PDFNISHANT395No ratings yet
- Chapter 3: Memory: 3.1 Memory Write Ability and Storage PermanenceDocument10 pagesChapter 3: Memory: 3.1 Memory Write Ability and Storage PermanencepurushresthaNo ratings yet
- Hierarchy of Storage: Primary MemoryDocument7 pagesHierarchy of Storage: Primary MemorySambit12No ratings yet
- Chapter 09 Memory - Coa KUDocument30 pagesChapter 09 Memory - Coa KUSujan TimalsinaNo ratings yet
- CO UNIT-IIIDocument12 pagesCO UNIT-IIImohamudsk007No ratings yet
- Explain in Detail Memory Classification. (Summer-2016, Summer-2015)Document19 pagesExplain in Detail Memory Classification. (Summer-2016, Summer-2015)yashuNo ratings yet
- Ovionic Unfied Memory Full ReportDocument26 pagesOvionic Unfied Memory Full ReportPramitha RayabandiNo ratings yet
- Unit IV Memory System NotesDocument13 pagesUnit IV Memory System NotesLakshmi Narayana PNo ratings yet
- Computer PresentationDocument33 pagesComputer PresentationGagandeepNo ratings yet
- Week 7:: Semiconductor Memories, Random Access Memory, Read Only MemoryDocument13 pagesWeek 7:: Semiconductor Memories, Random Access Memory, Read Only MemoryJohn Kenneth MantesNo ratings yet
- Computer Architecture and Organization Chapter 4Document37 pagesComputer Architecture and Organization Chapter 4አኖኒ መስ100% (1)
- Chapter 4Document24 pagesChapter 4meliha hawiNo ratings yet
- Memory: Mohana S.H, Usmrfg College, Kuvempu UniversityDocument6 pagesMemory: Mohana S.H, Usmrfg College, Kuvempu UniversityMohana KurubaNo ratings yet
- Chapter 3 PDFDocument16 pagesChapter 3 PDFmitiku tolasaNo ratings yet
- MemoryDocument22 pagesMemoryMd. Masum Latif Chowdhury (201016006)No ratings yet
- Internal Memory Ch1Document26 pagesInternal Memory Ch1shanbel ayayuNo ratings yet
- Module 2 - Reading6 - RandomAccessMemoryDocument7 pagesModule 2 - Reading6 - RandomAccessMemoryChristopher AdvinculaNo ratings yet
- Semiconductor MemoryDocument17 pagesSemiconductor MemoryAnkit SaxenaNo ratings yet
- RAM and RomDocument4 pagesRAM and Rommanoj22490No ratings yet
- C Lassification of MemoryDocument17 pagesC Lassification of Memorychavimangal837No ratings yet
- Lecture 2 - Memory DevicesDocument53 pagesLecture 2 - Memory Devicesjonathan stevenNo ratings yet
- Chapter 08 and Chapter 09Document32 pagesChapter 08 and Chapter 09Mahesh BasnetNo ratings yet
- Classification of MemoryDocument16 pagesClassification of Memoryyashikakaimwaal123No ratings yet
- Coa Unit-4Document27 pagesCoa Unit-4singhshiva8082No ratings yet
- Design of Sram in VerilogDocument124 pagesDesign of Sram in VerilogAbhi Mohan Reddy100% (3)
- NEw Lectures (BS-ENg)Document72 pagesNEw Lectures (BS-ENg)Qamar usmanNo ratings yet
- MemoryDocument13 pagesMemoryibrahin mahamedNo ratings yet
- Unit - III Concept of Memory PDFDocument13 pagesUnit - III Concept of Memory PDFxsaaNo ratings yet
- Computer MemoryDocument16 pagesComputer MemoryRudra ChauhanNo ratings yet
- Computer Memory and StorageDocument26 pagesComputer Memory and StorageShekh FaridNo ratings yet
- MemoryDocument87 pagesMemoryrajkumarNo ratings yet
- Chapter 4Document14 pagesChapter 4Awash Zilong SharmaNo ratings yet
- Unit 4 PartDocument9 pagesUnit 4 PartArnav AgarwalNo ratings yet
- Memory OrganizationDocument70 pagesMemory OrganizationrahqansayeedNo ratings yet
- Unit 3 - Memory OrganizationDocument98 pagesUnit 3 - Memory OrganizationVanshaj JainNo ratings yet
- Unit 5 (Csa)Document25 pagesUnit 5 (Csa)Bindu VermaNo ratings yet
- Memory Organization Part 2Document13 pagesMemory Organization Part 2RISHITANo ratings yet
- Computer Organization: Hierarchical SpeedDocument25 pagesComputer Organization: Hierarchical SpeedAbin KurianNo ratings yet
- Ch5 بنيةDocument17 pagesCh5 بنيةمهند مهندNo ratings yet
- Computer MemoryDocument22 pagesComputer MemoryasiNo ratings yet
- Different Types of MemoryDocument34 pagesDifferent Types of MemoryPirapuraj PonnampalamNo ratings yet
- Memory and IO DesignDocument91 pagesMemory and IO DesignMworozi DicksonNo ratings yet
- I. Computer Memory A. Computer Memory OverviewDocument4 pagesI. Computer Memory A. Computer Memory OverviewRachelle GandaNo ratings yet
- Unit 3 NotesDocument14 pagesUnit 3 Notesesasc.swayamNo ratings yet
- Computer Awareness - Computer Awareness-3Document14 pagesComputer Awareness - Computer Awareness-3Ram BuragaddaNo ratings yet
- UNIT V PartB C QB WithAnswersDocument19 pagesUNIT V PartB C QB WithAnswersTylerdurden 06No ratings yet
- A Study About Non-Volatile MemoriesDocument11 pagesA Study About Non-Volatile MemoriesDileep KumarNo ratings yet
- Memory Devices JayjeetDocument53 pagesMemory Devices JayjeetmansurNo ratings yet
- Ict Assignment# 01Document7 pagesIct Assignment# 01ibrarNo ratings yet
- Lecture 6 PDFDocument14 pagesLecture 6 PDFtestscribd9898No ratings yet
- Lecture 10Document44 pagesLecture 10ameerhamza0656770No ratings yet
- Here Is An Example of A Machine With 1GB of RAMDocument6 pagesHere Is An Example of A Machine With 1GB of RAMaguslizarNo ratings yet
- Memory TypesDocument17 pagesMemory TypesMitul Modi100% (2)
- Its - Variois Hardware ComponentsDocument5 pagesIts - Variois Hardware ComponentsPrayas 360No ratings yet
- Computer Memory: Types of RamDocument3 pagesComputer Memory: Types of RamJose Ric Catarus Bataluna Jr.No ratings yet
- Advanced Test Methods for SRAMs: Effective Solutions for Dynamic Fault Detection in Nanoscaled TechnologiesFrom EverandAdvanced Test Methods for SRAMs: Effective Solutions for Dynamic Fault Detection in Nanoscaled TechnologiesNo ratings yet
- Computer Science: Learn about Algorithms, Cybersecurity, Databases, Operating Systems, and Web DesignFrom EverandComputer Science: Learn about Algorithms, Cybersecurity, Databases, Operating Systems, and Web DesignNo ratings yet
- Module 5 PDFDocument35 pagesModule 5 PDFbalajibs203285No ratings yet
- Feleke Register Transfer Note Part 1Document15 pagesFeleke Register Transfer Note Part 1TiruNo ratings yet
- Matlab Image Processing TutorialDocument264 pagesMatlab Image Processing TutorialBezawitNo ratings yet
- May 2018 M.lib, I.scDocument14 pagesMay 2018 M.lib, I.scAmritha T. HNo ratings yet
- ISCSI Universal Storage John HufferdDocument388 pagesISCSI Universal Storage John HufferdFelipe Oliveira GutierrezNo ratings yet
- Bitsy Linux BootROM ManualDocument6 pagesBitsy Linux BootROM ManualTrọng Đoàn ThanhNo ratings yet
- Questions ch.1 AisDocument29 pagesQuestions ch.1 Aisemanhany652No ratings yet
- MPU MMU in ARMDocument34 pagesMPU MMU in ARMcalvin6789No ratings yet
- Programmable Controller: KV Changes The Meaning of "Selection"Document60 pagesProgrammable Controller: KV Changes The Meaning of "Selection"Đinh Tiến NamNo ratings yet
- Vrealize Operations Manager 70 Reference Guide PDFDocument225 pagesVrealize Operations Manager 70 Reference Guide PDFfejeilenNo ratings yet
- Qnap Hardware ManualDocument51 pagesQnap Hardware Manualandresoares2007No ratings yet
- BL Bar 2112a Lec 1922s MaryDocument10 pagesBL Bar 2112a Lec 1922s MaryPrincess Ann PaloNo ratings yet
- Digital Forensics As Investigation Tool - NBR - BangladeshDocument84 pagesDigital Forensics As Investigation Tool - NBR - BangladeshChaitaly R.No ratings yet
- 1 Hardware and Software UpdatedDocument27 pages1 Hardware and Software UpdatedShiv NaiduNo ratings yet
- Ict 101 PrelimDocument14 pagesIct 101 PrelimrheacalvoNo ratings yet
- IT2060/IE2061: Operating Systems System Administration Introduction To Operating SystemDocument34 pagesIT2060/IE2061: Operating Systems System Administration Introduction To Operating SystemLets Try FoodsNo ratings yet
- Technical Specification For Direct Reading Optical Emission SpectrometerDocument3 pagesTechnical Specification For Direct Reading Optical Emission Spectrometerswaroop.govindarajanNo ratings yet
- Ram and RomDocument12 pagesRam and RomArun Ahirwar50% (2)
- Kawasaki - AS Language Manual (E Series)Document502 pagesKawasaki - AS Language Manual (E Series)vinoindya100% (2)
- PPT On Data StructuresDocument54 pagesPPT On Data Structuresshyma naNo ratings yet
- 6752 To 6735Document10 pages6752 To 6735Christian Asher OliveriaNo ratings yet
- M. J. Dworkin, "FIPS 197, Advanced Encryption Standard (AES) ," Netw. Secur. Natl. Inst. Stand. TechnolDocument25 pagesM. J. Dworkin, "FIPS 197, Advanced Encryption Standard (AES) ," Netw. Secur. Natl. Inst. Stand. TechnolDyka AGNo ratings yet
- Broadcastengineeringworld201308 DLDocument73 pagesBroadcastengineeringworld201308 DLMargarita Alcevska0% (1)
- ComfunDocument4 pagesComfunMarc BuenaflorNo ratings yet
- HP d530SFF DetailsDocument2 pagesHP d530SFF DetailsvigussNo ratings yet
- INTE 30103 Information Processing and Handling in Libraries and Information CentersDocument4 pagesINTE 30103 Information Processing and Handling in Libraries and Information CentersAriel MaglenteNo ratings yet
- Growatt Server Open API Protocol StandardsDocument44 pagesGrowatt Server Open API Protocol StandardscyberdiamondNo ratings yet
- Difference Between Static and Dynamic RAMDocument2 pagesDifference Between Static and Dynamic RAMMamun RassalNo ratings yet