Download as pdf or txt
You might also like
- Synchronous MachinesDocument24 pagesSynchronous MachinesJones Bk EssumanNo ratings yet
- Nema MG 1Document57 pagesNema MG 1Orlando Velado40% (5)
- EM-2 Unit-4 Notes (R20)Document33 pagesEM-2 Unit-4 Notes (R20)tripgokarna08No ratings yet
- Chapter 5 Synchronous MachinesDocument27 pagesChapter 5 Synchronous MachinesIfit PrabowoNo ratings yet
- Chapter 8 - SynchronousDocument12 pagesChapter 8 - SynchronousLin ChongNo ratings yet
- Synchronous Machine: Generator MotorDocument14 pagesSynchronous Machine: Generator Motorhafiz_jaaffar100% (2)
- 653412thu Zar MonDocument7 pages653412thu Zar MonFERNANDO PINTO ALANo ratings yet
- EMECDocument73 pagesEMECdivyansh singhNo ratings yet
- Questions & Answers On Synchronous MotorsDocument28 pagesQuestions & Answers On Synchronous Motorskibrom atsbha100% (1)
- Inducing Voltage in 3-Phase Synchronous GeneratorDocument6 pagesInducing Voltage in 3-Phase Synchronous GeneratorBilal KhanNo ratings yet
- Exp5 SheetDocument6 pagesExp5 SheetMajdy gamingNo ratings yet
- Exp5 WORDDocument6 pagesExp5 WORDMajdy gamingNo ratings yet
- Ehsan Sir - Synchronous MachinesDocument98 pagesEhsan Sir - Synchronous Machinesmdrafadul alamNo ratings yet
- HAZEU PaperDocument6 pagesHAZEU Papercedric.hazeuNo ratings yet
- (PDF) Short Questions and Answers EE1251 Electrical Machines II - Mosybk Getto19 - Academia - EduDocument14 pages(PDF) Short Questions and Answers EE1251 Electrical Machines II - Mosybk Getto19 - Academia - EduSolomon MebrahtuNo ratings yet
- 5 AC Machimes-Synchronous MachineDocument36 pages5 AC Machimes-Synchronous MachineJohannes Butar-butarNo ratings yet
- Chapter-5 Synchronous MacineDocument30 pagesChapter-5 Synchronous MacineAman BazeNo ratings yet
- V CurveDocument6 pagesV CurveKunalNo ratings yet
- Synchronous Machine Problems With SolutionsDocument34 pagesSynchronous Machine Problems With Solutionsgsantosh06No ratings yet
- وصف مواد تخصص الهندسة الكهربائية باللغة العربيةDocument23 pagesوصف مواد تخصص الهندسة الكهربائية باللغة العربيةحمزة الفيتوريNo ratings yet
- Ac PDFDocument15 pagesAc PDFJarah GutierrezNo ratings yet
- Chapter 2 Synchronous MachinespptDocument53 pagesChapter 2 Synchronous MachinespptraygharNo ratings yet
- Lecture 15 Synchronous MachineDocument8 pagesLecture 15 Synchronous MachineBAIJNATH MANDALNo ratings yet
- Synchronous Machine Characteristics and OperationDocument20 pagesSynchronous Machine Characteristics and Operationhozipek5599No ratings yet
- 6 Motor SinkronDocument33 pages6 Motor SinkronAchmad YukrisnaNo ratings yet
- Design and Simulation of Field Voltage Control For Synchronous GeneratorDocument6 pagesDesign and Simulation of Field Voltage Control For Synchronous GeneratorThet TinNo ratings yet
- TYC 07 Synchronous Machines: Special NoteDocument6 pagesTYC 07 Synchronous Machines: Special NoteDebajyoti DattaNo ratings yet
- PSD CDT28 Summary 6EEE1 CVS 2022-23 PDFDocument6 pagesPSD CDT28 Summary 6EEE1 CVS 2022-23 PDFNadeem KhanNo ratings yet
- Synchronous Machines TestsDocument22 pagesSynchronous Machines TestsKareem CambridgeNo ratings yet
- I JX I JX R I V E: C D C DDocument119 pagesI JX I JX R I V E: C D C DCharlton ChristNo ratings yet
- Lab 8 DCMotor ParametersDocument11 pagesLab 8 DCMotor ParametersNikhil PatroNo ratings yet
- Synchronverter Slides ExpandedDocument39 pagesSynchronverter Slides ExpandedcheshankarNo ratings yet
- Power Systems AssignmentDocument12 pagesPower Systems AssignmentJbmulindwaNo ratings yet
- Investigation of Frequency Reduction Behavior On Three Phase Synchronous Generator and TransformerDocument17 pagesInvestigation of Frequency Reduction Behavior On Three Phase Synchronous Generator and TransformerJorge Luis Sarmiento PiersantelliNo ratings yet
- Synchronous MachineDocument27 pagesSynchronous MachinenaaventhenNo ratings yet
- Ying 99Document6 pagesYing 99Vladimir GeorgievskiNo ratings yet
- Tutorial Sheet 04Document5 pagesTutorial Sheet 04Abhishek ThakurNo ratings yet
- Chapter 11 - PS Stability 23 07 11 NotesDocument69 pagesChapter 11 - PS Stability 23 07 11 NotesMohd A IshakNo ratings yet
- Power Angle Characteristics of SynchronousMachineDocument7 pagesPower Angle Characteristics of SynchronousMachinetemp tempNo ratings yet
- ECTE323/8323 Power Engineering 2 Spring 2020: A/Prof. Ashish Agalgaonkar Prof. Danny (Sutanto) SoetantoDocument28 pagesECTE323/8323 Power Engineering 2 Spring 2020: A/Prof. Ashish Agalgaonkar Prof. Danny (Sutanto) SoetantoFUCKYOUNo ratings yet
- Direct Torque Control of Symmetrical and Asymmetrical Single Phase Induction MotorDocument4 pagesDirect Torque Control of Symmetrical and Asymmetrical Single Phase Induction MotorBook4AllNo ratings yet
- Phasor Diagram For Synchronous Generator - Electrical4uDocument4 pagesPhasor Diagram For Synchronous Generator - Electrical4uM Kumar MarimuthuNo ratings yet
- Applied Electronics and Electrical MachinesDocument30 pagesApplied Electronics and Electrical MachinesdenNo ratings yet
- Help - Permanent Magnet Synchronous Machine - Blocks (SimPowerSystems™)Document14 pagesHelp - Permanent Magnet Synchronous Machine - Blocks (SimPowerSystems™)lojain centerNo ratings yet
- ECE330 Power Circuits and Electromechanics: Dr. Nam Nguyen-Quang Fall 2016Document9 pagesECE330 Power Circuits and Electromechanics: Dr. Nam Nguyen-Quang Fall 2016Tran Nguyen KhangNo ratings yet
- Bab III.2.1. Generator Sinkron (Lanjutan)Document28 pagesBab III.2.1. Generator Sinkron (Lanjutan)Hariz Audirahmawan100% (1)
- Chapter 4 - Synchronuous Generator (Part A)Document27 pagesChapter 4 - Synchronuous Generator (Part A)Nur AfiqahNo ratings yet
- EEE G544/09/CompreDocument1 pageEEE G544/09/ComprePrateek PareekNo ratings yet
- Synch Alternator Exp6Document8 pagesSynch Alternator Exp6Prìyañshú GuptãNo ratings yet
- EM-II Lab 4Document4 pagesEM-II Lab 4Subhash KumarNo ratings yet
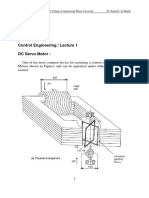
- Control Engineering / Lecture 1 DC Servo MotorDocument7 pagesControl Engineering / Lecture 1 DC Servo Motorjin kazamaNo ratings yet
- Three Phase Synchronous GeneratorDocument29 pagesThree Phase Synchronous GeneratorYazan YousefNo ratings yet
- Synchronous Machine Parameter Measurement: Poles F NDocument9 pagesSynchronous Machine Parameter Measurement: Poles F NRitesh BhattNo ratings yet
- 053 Steady State Reactances XD XQDocument8 pages053 Steady State Reactances XD XQSatyam ShrivastavaNo ratings yet
- Ee 316 - Electrical Machines 1 Week 8: ISUE-EIE-Syl-014 Revision: 02 Effectivity: August 1, 2020Document5 pagesEe 316 - Electrical Machines 1 Week 8: ISUE-EIE-Syl-014 Revision: 02 Effectivity: August 1, 2020Laurence Abrogena AlmazanNo ratings yet
- V and Inverted V Curves of Synchronous MotorDocument4 pagesV and Inverted V Curves of Synchronous MotorPrakash ArumugamNo ratings yet
- Synchronous Generators - 2 Marks Questions and AnswersDocument3 pagesSynchronous Generators - 2 Marks Questions and AnswersJoseph Harindranath67% (3)
- Problems Chapter 5 1Document7 pagesProblems Chapter 5 1Siva KumarNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Magnetic Equivalent Circuit Models Using Global Reluctance Networks Methodology For Design of Permanent Magnet Flux Switching MachineDocument8 pagesMagnetic Equivalent Circuit Models Using Global Reluctance Networks Methodology For Design of Permanent Magnet Flux Switching Machineihab benayacheNo ratings yet
- Reluctance MotorDocument27 pagesReluctance MotorMax Sedric L LaylayNo ratings yet
- Ac Motor WikiDocument12 pagesAc Motor WikiQendrim ZekaNo ratings yet
- Chapter 04 Polyphase Synchronous MotorDocument19 pagesChapter 04 Polyphase Synchronous MotorAbdullrahman Al-ShammaaNo ratings yet
- Sai Vidya Institute of Technology: QuestionsDocument7 pagesSai Vidya Institute of Technology: QuestionsSuprithaNo ratings yet
- Tutorial 1 - SolutionDocument10 pagesTutorial 1 - SolutionSam StideNo ratings yet
- Synchronous Reluctance MotorDocument22 pagesSynchronous Reluctance MotorAjit KalelNo ratings yet
- EEObjective Q2Document36 pagesEEObjective Q2Cedric Kasimero BeronyoNo ratings yet
- Transp VDocument40 pagesTransp VlacrimogenoNo ratings yet
- Synchronous Machines: List of FormulaeDocument6 pagesSynchronous Machines: List of FormulaekkkNo ratings yet
- The Expanding Role of PM Machines in Direct-Drive PDFDocument6 pagesThe Expanding Role of PM Machines in Direct-Drive PDFrakeshee2007No ratings yet
- Capability CurveDocument11 pagesCapability CurveAlex PANo ratings yet
- 6461nr-R09-Power System DynamicsDocument1 page6461nr-R09-Power System Dynamicssanju0123sssNo ratings yet
- Final ExamDocument2 pagesFinal ExamFlicker LoserNo ratings yet
- Caps QBDocument44 pagesCaps QBRit60% (5)
- Audi Electric Vehicles SSP PDFDocument62 pagesAudi Electric Vehicles SSP PDFmoxiecartechNo ratings yet
- Motor Vibration AnalysisDocument61 pagesMotor Vibration Analysiskiki kamui100% (1)
- PMSM ControlDocument35 pagesPMSM Controldhaval2430No ratings yet
- DACM PaperDocument31 pagesDACM PaperKaushal janiNo ratings yet
- Electrical Machine DesignDocument9 pagesElectrical Machine DesignSandeep KumarkjNo ratings yet
- EM2 - Lab - 1 Part 2Document4 pagesEM2 - Lab - 1 Part 2S M Nahidul IslamNo ratings yet
- E2 (9) The Synchronous Motor REPORT Data SAMPLEDocument7 pagesE2 (9) The Synchronous Motor REPORT Data SAMPLEJimothy PickensNo ratings yet
- 3 Synchronous PDFDocument16 pages3 Synchronous PDFASHOK P R kceNo ratings yet
- Sonata HEV MotorDocument18 pagesSonata HEV MotorPedro SantisNo ratings yet
- PX7203 SpecialElectricalMachinesDocument11 pagesPX7203 SpecialElectricalMachines1balamanianNo ratings yet
- 00reve1 LoRes PDFDocument56 pages00reve1 LoRes PDFkaloy33No ratings yet
- Eee-Vii-Industrial Drives and Applications (10ee74) - NotesDocument90 pagesEee-Vii-Industrial Drives and Applications (10ee74) - NotesMohammed AlhakeemiNo ratings yet
- Xr-Ee-Es 2009 007Document109 pagesXr-Ee-Es 2009 007Kumail Hasan NaqviNo ratings yet
- Hydro Electric Power Plant: Mr. Nirmal Kumar Yadva (Assist General Manger)Document40 pagesHydro Electric Power Plant: Mr. Nirmal Kumar Yadva (Assist General Manger)Nischal RaoNo ratings yet