
Reviewer For 3rd ICT10 1
Reviewer For 3rd ICT10 1
You might also like
- Brian Bix Jurisprudence Theory and Context PDFDocument3 pagesBrian Bix Jurisprudence Theory and Context PDFmahendra singh50% (2)
- MN (Acac) 3 Uv PDFDocument17 pagesMN (Acac) 3 Uv PDFSavita SavitaNo ratings yet
- Unit - I: Introduction To Embedded SystemsDocument47 pagesUnit - I: Introduction To Embedded SystemsaishwaryaNo ratings yet
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingFrom EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingRating: 4 out of 5 stars4/5 (1)
- Presentation 2 (1) - 1Document25 pagesPresentation 2 (1) - 1misthimangulleyNo ratings yet
- Industrial Conveyors Belt Counting Object SystemDocument15 pagesIndustrial Conveyors Belt Counting Object SystemRavi Joshi100% (1)
- Design Consideration and Hardware Components of The SystemDocument8 pagesDesign Consideration and Hardware Components of The SystemKyaw SoeNo ratings yet
- 4-Kanal L293D - ENGDocument24 pages4-Kanal L293D - ENGwilsnicoNo ratings yet
- Group 12 ReportDocument18 pagesGroup 12 ReportPoonam GuptaNo ratings yet
- Content: Block Diagram DiscriptionDocument31 pagesContent: Block Diagram DiscriptionSriram KrishnanNo ratings yet
- L293D Based Arduino Motor ShieldDocument3 pagesL293D Based Arduino Motor ShieldDJ ATBNo ratings yet
- IT WorkshopDocument21 pagesIT WorkshopVishal ReddyNo ratings yet
- Atmega324P/V: 8-Bit Avr MicrocontrollersDocument20 pagesAtmega324P/V: 8-Bit Avr MicrocontrollersRudi AnotheerNo ratings yet
- 8-Bit Microcontroller With 128K Bytes In-System Programmable Flash Atmega128 Atmega128L PreliminaryDocument27 pages8-Bit Microcontroller With 128K Bytes In-System Programmable Flash Atmega128 Atmega128L Preliminarymike_helplineNo ratings yet
- UC ATmega328 328P SummaryfvafdvdfdfvdfDocument24 pagesUC ATmega328 328P SummaryfvafdvdfdfvdfKevin SerranoNo ratings yet
- Workshope On Arduino21Document17 pagesWorkshope On Arduino21Nikhil ShahNo ratings yet
- DRDODocument21 pagesDRDOAyush AgarwalNo ratings yet
- Atmel 2586 AVR 8 Bit Microcontroller ATtiny25 ATtiny45 ATtiny85 DatasheetDocument234 pagesAtmel 2586 AVR 8 Bit Microcontroller ATtiny25 ATtiny45 ATtiny85 DatasheetcrocomodxNo ratings yet
- Atmega 128Document10 pagesAtmega 128Neena HulkotiNo ratings yet
- Driver Shields L293DDocument5 pagesDriver Shields L293DChandra NurikoNo ratings yet
- Embedded SystemDocument57 pagesEmbedded SystemAshish ambasthaNo ratings yet
- Advanced Vehicle Security System With Theft Control and Accident NotificationDocument70 pagesAdvanced Vehicle Security System With Theft Control and Accident NotificationVaibhav AwasthiNo ratings yet
- Devloper BoardDocument82 pagesDevloper Boardpukhraj titreNo ratings yet
- Data SheetDocument211 pagesData SheetYana PrikitiwNo ratings yet
- Introduction To Microcontroller and Arduino UNODocument26 pagesIntroduction To Microcontroller and Arduino UNOmspotatohead.skrrtNo ratings yet
- 02 AVR-Micro ControllerDocument59 pages02 AVR-Micro ControllerPriscillaNo ratings yet
- Atmel 2586 AVR 8 Bit Microcontroller ATtiny25 ATtiny45 ATtiny85 DatasheetDocument234 pagesAtmel 2586 AVR 8 Bit Microcontroller ATtiny25 ATtiny45 ATtiny85 DatasheetTudor ArthurNo ratings yet
- At Mega 64Document392 pagesAt Mega 64Jackson Manrique GutierrezNo ratings yet
- Attiny 2313Document226 pagesAttiny 2313api-241773043No ratings yet
- Efm32G890 Datasheet: EFM32G890 Microcontrollers Are Suited For All Battery Operated ApplicationsDocument71 pagesEfm32G890 Datasheet: EFM32G890 Microcontrollers Are Suited For All Battery Operated ApplicationsamerosperosNo ratings yet
- Atmel 2513 8 Bit AVR Microntroller ATmega162 DatasheetDocument324 pagesAtmel 2513 8 Bit AVR Microntroller ATmega162 DatasheetarekkontrakanNo ratings yet
- Avr Risc MicrocontrollerDocument11 pagesAvr Risc MicrocontrollerAmy OliverNo ratings yet
- 8-Bit Microcontroller With 128K Bytes In-System Programmable Flash Atmega128 Atmega128L PreliminaryDocument346 pages8-Bit Microcontroller With 128K Bytes In-System Programmable Flash Atmega128 Atmega128L Preliminarysg22889No ratings yet
- ATtiny 85Document201 pagesATtiny 85Λιθοξόος Έλλην100% (2)
- 273-Article Text-474-1-10-20171230Document5 pages273-Article Text-474-1-10-20171230Jinsha CNo ratings yet
- Force MeasuringDocument18 pagesForce MeasuringOjas GokhaleNo ratings yet
- Atmega32 Dev Board - EFY March11 PDFDocument7 pagesAtmega32 Dev Board - EFY March11 PDFsagar_gy100% (1)
- ECE 513 - PART1-Introduction To PIC16F84ADocument46 pagesECE 513 - PART1-Introduction To PIC16F84AMitch100% (1)
- Component DetailsDocument45 pagesComponent DetailsSHARANYANo ratings yet
- 8-Bit Microcontroller With 8K Bytes In-System Programmable Flash Atmega8535 Atmega8535L PreliminaryDocument19 pages8-Bit Microcontroller With 8K Bytes In-System Programmable Flash Atmega8535 Atmega8535L Preliminarymike_helplineNo ratings yet
- Essentials of Motors and Motor Driver: Interfacing Proximity Sensor With MotorDocument28 pagesEssentials of Motors and Motor Driver: Interfacing Proximity Sensor With MotorAli KhormiNo ratings yet
- 8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega162 Atmega162VDocument22 pages8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega162 Atmega162VSiddharth SharmaNo ratings yet
- Atmega128 16auDocument386 pagesAtmega128 16auNarintorn KanamoonNo ratings yet
- 8-Bit Microcontroller With 32K Bytes In-System Programmable Flash Atmega32ADocument18 pages8-Bit Microcontroller With 32K Bytes In-System Programmable Flash Atmega32Amiusuario_1022No ratings yet
- Self Study: Atmel Atmega128 Architecture: Anupama KR & Meetha.V.Shenoy Embedded System Design 8051Document5 pagesSelf Study: Atmel Atmega128 Architecture: Anupama KR & Meetha.V.Shenoy Embedded System Design 8051Shivam ShuklaNo ratings yet
- ATtiny 24Document238 pagesATtiny 24cbkulatungeNo ratings yet
- Lab 3Document6 pagesLab 3Vu LeNo ratings yet
- ATmega32 SummaryDocument18 pagesATmega32 SummaryRajesh KumarNo ratings yet
- Line Following RobotDocument54 pagesLine Following RobotGautam RaaviNo ratings yet
- SLS11Document27 pagesSLS11maneeshNo ratings yet
- Atmel Avr Xmega DDocument309 pagesAtmel Avr Xmega DRyosuke RaijiNo ratings yet
- Assigment 3Document2 pagesAssigment 3manhagNo ratings yet
- ATM Terminal Design Based On Figure Print Recognition DocuDocument115 pagesATM Terminal Design Based On Figure Print Recognition DocuPraveen NaiduNo ratings yet
- 1 Hardware and Its Working: ArduinoDocument10 pages1 Hardware and Its Working: ArduinoRakesh ChaurasiaNo ratings yet
- Code LockDocument94 pagesCode LockVaibhav AhujaNo ratings yet
- DC Motor Speed Control by AndroidDocument8 pagesDC Motor Speed Control by AndroidNikhil GaikwadNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- ProRes 422 WhitepaperDocument11 pagesProRes 422 WhitepaperffwdcoNo ratings yet
- Sentinel C28Document4 pagesSentinel C28aa0% (1)
- Charging SystemDocument10 pagesCharging SystemSteven Andrew ElamparoNo ratings yet
- Ful 56 Introducción A La Maquina ÍnternaDocument4 pagesFul 56 Introducción A La Maquina Ínternafernando rochaNo ratings yet
- Assignment Power ElectronicDocument21 pagesAssignment Power ElectronicSeth RathanakNo ratings yet
- Lc320exn Sca1Document36 pagesLc320exn Sca1My USERNAMENo ratings yet
- Smith Chart in Color - 2Document1 pageSmith Chart in Color - 2Andro Elnatan HarianjaNo ratings yet
- Honeywell Solar Modules Specsheet P72WDocument2 pagesHoneywell Solar Modules Specsheet P72WSanrasniNo ratings yet
- 1001 Solved Problems in Engineering MathematicsDocument10 pages1001 Solved Problems in Engineering MathematicsErrollNo ratings yet
- Gesture Recognition For Home AutomationDocument13 pagesGesture Recognition For Home AutomationShreyasi SarkarNo ratings yet
- Jain Thesis PDFDocument112 pagesJain Thesis PDFRonaldo CantonaNo ratings yet
- Zoho Entry ListDocument29 pagesZoho Entry ListDhaval DadhaniaNo ratings yet
- Read MeDocument2 pagesRead MeJunior ReisNo ratings yet
- SIM7X00 Series UART Application Note V1.00Document15 pagesSIM7X00 Series UART Application Note V1.00Javier GuevaraNo ratings yet
- Gravity Wave Detectors by Gregory HodowanecDocument33 pagesGravity Wave Detectors by Gregory Hodowaneconæss100% (3)
- Kajaani Mcai: User ManualDocument58 pagesKajaani Mcai: User ManualPauloNo ratings yet
- Introduction To Communication SystemDocument54 pagesIntroduction To Communication SystemOthmane MadaniNo ratings yet
- Dynamic Modeling of Diesel Generator Based On Electrical and Mechanical AspectsDocument7 pagesDynamic Modeling of Diesel Generator Based On Electrical and Mechanical AspectsHitesh JoshiNo ratings yet
- Rht-Probe Temperature and Humidity Sensor: MANUAL - V1.0xDocument1 pageRht-Probe Temperature and Humidity Sensor: MANUAL - V1.0xJonatan Allan Oliveira SouzaNo ratings yet
- 20-Port Mirroring CommandDocument10 pages20-Port Mirroring CommandArnon PipatbanjongNo ratings yet
- Maximizing The Transferred Power To Electric Arc Furnace For Having Maximum ProductionDocument8 pagesMaximizing The Transferred Power To Electric Arc Furnace For Having Maximum Productionteektak1No ratings yet
- Salwico IR Test Lamp: IR Flame Detector TesterDocument1 pageSalwico IR Test Lamp: IR Flame Detector TesterТарас АртюхNo ratings yet
- Electronics Module 2 Quarter 2Document7 pagesElectronics Module 2 Quarter 2Aldritz Peralta alagarmoNo ratings yet
- Manual Jaguar S-TypeDocument219 pagesManual Jaguar S-TypeSaulito Oxte EduardoNo ratings yet
- 311l Testing ProcedureDocument21 pages311l Testing ProcedureJoaquim AlvesNo ratings yet
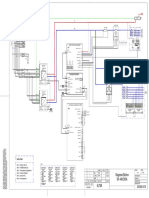
- Entrada CA/Mains Input - 220VCA 2F + PE: Diagrama Elétrico SR - 48V/300ADocument1 pageEntrada CA/Mains Input - 220VCA 2F + PE: Diagrama Elétrico SR - 48V/300AantonioNo ratings yet
- Datasheet 98-8032-0 en 220v 50hzDocument61 pagesDatasheet 98-8032-0 en 220v 50hzmohon_eee03No ratings yet
























































































Download as pdf or txt
You might also like
- Brian Bix Jurisprudence Theory and Context PDFDocument3 pagesBrian Bix Jurisprudence Theory and Context PDFmahendra singh50% (2)
- MN (Acac) 3 Uv PDFDocument17 pagesMN (Acac) 3 Uv PDFSavita SavitaNo ratings yet
- Unit - I: Introduction To Embedded SystemsDocument47 pagesUnit - I: Introduction To Embedded SystemsaishwaryaNo ratings yet
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingFrom EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingRating: 4 out of 5 stars4/5 (1)
- Presentation 2 (1) - 1Document25 pagesPresentation 2 (1) - 1misthimangulleyNo ratings yet
- Industrial Conveyors Belt Counting Object SystemDocument15 pagesIndustrial Conveyors Belt Counting Object SystemRavi Joshi100% (1)
- Design Consideration and Hardware Components of The SystemDocument8 pagesDesign Consideration and Hardware Components of The SystemKyaw SoeNo ratings yet
- 4-Kanal L293D - ENGDocument24 pages4-Kanal L293D - ENGwilsnicoNo ratings yet
- Group 12 ReportDocument18 pagesGroup 12 ReportPoonam GuptaNo ratings yet
- Content: Block Diagram DiscriptionDocument31 pagesContent: Block Diagram DiscriptionSriram KrishnanNo ratings yet
- L293D Based Arduino Motor ShieldDocument3 pagesL293D Based Arduino Motor ShieldDJ ATBNo ratings yet
- IT WorkshopDocument21 pagesIT WorkshopVishal ReddyNo ratings yet
- Atmega324P/V: 8-Bit Avr MicrocontrollersDocument20 pagesAtmega324P/V: 8-Bit Avr MicrocontrollersRudi AnotheerNo ratings yet
- 8-Bit Microcontroller With 128K Bytes In-System Programmable Flash Atmega128 Atmega128L PreliminaryDocument27 pages8-Bit Microcontroller With 128K Bytes In-System Programmable Flash Atmega128 Atmega128L Preliminarymike_helplineNo ratings yet
- UC ATmega328 328P SummaryfvafdvdfdfvdfDocument24 pagesUC ATmega328 328P SummaryfvafdvdfdfvdfKevin SerranoNo ratings yet
- Workshope On Arduino21Document17 pagesWorkshope On Arduino21Nikhil ShahNo ratings yet
- DRDODocument21 pagesDRDOAyush AgarwalNo ratings yet
- Atmel 2586 AVR 8 Bit Microcontroller ATtiny25 ATtiny45 ATtiny85 DatasheetDocument234 pagesAtmel 2586 AVR 8 Bit Microcontroller ATtiny25 ATtiny45 ATtiny85 DatasheetcrocomodxNo ratings yet
- Atmega 128Document10 pagesAtmega 128Neena HulkotiNo ratings yet
- Driver Shields L293DDocument5 pagesDriver Shields L293DChandra NurikoNo ratings yet
- Embedded SystemDocument57 pagesEmbedded SystemAshish ambasthaNo ratings yet
- Advanced Vehicle Security System With Theft Control and Accident NotificationDocument70 pagesAdvanced Vehicle Security System With Theft Control and Accident NotificationVaibhav AwasthiNo ratings yet
- Devloper BoardDocument82 pagesDevloper Boardpukhraj titreNo ratings yet
- Data SheetDocument211 pagesData SheetYana PrikitiwNo ratings yet
- Introduction To Microcontroller and Arduino UNODocument26 pagesIntroduction To Microcontroller and Arduino UNOmspotatohead.skrrtNo ratings yet
- 02 AVR-Micro ControllerDocument59 pages02 AVR-Micro ControllerPriscillaNo ratings yet
- Atmel 2586 AVR 8 Bit Microcontroller ATtiny25 ATtiny45 ATtiny85 DatasheetDocument234 pagesAtmel 2586 AVR 8 Bit Microcontroller ATtiny25 ATtiny45 ATtiny85 DatasheetTudor ArthurNo ratings yet
- At Mega 64Document392 pagesAt Mega 64Jackson Manrique GutierrezNo ratings yet
- Attiny 2313Document226 pagesAttiny 2313api-241773043No ratings yet
- Efm32G890 Datasheet: EFM32G890 Microcontrollers Are Suited For All Battery Operated ApplicationsDocument71 pagesEfm32G890 Datasheet: EFM32G890 Microcontrollers Are Suited For All Battery Operated ApplicationsamerosperosNo ratings yet
- Atmel 2513 8 Bit AVR Microntroller ATmega162 DatasheetDocument324 pagesAtmel 2513 8 Bit AVR Microntroller ATmega162 DatasheetarekkontrakanNo ratings yet
- Avr Risc MicrocontrollerDocument11 pagesAvr Risc MicrocontrollerAmy OliverNo ratings yet
- 8-Bit Microcontroller With 128K Bytes In-System Programmable Flash Atmega128 Atmega128L PreliminaryDocument346 pages8-Bit Microcontroller With 128K Bytes In-System Programmable Flash Atmega128 Atmega128L Preliminarysg22889No ratings yet
- ATtiny 85Document201 pagesATtiny 85Λιθοξόος Έλλην100% (2)
- 273-Article Text-474-1-10-20171230Document5 pages273-Article Text-474-1-10-20171230Jinsha CNo ratings yet
- Force MeasuringDocument18 pagesForce MeasuringOjas GokhaleNo ratings yet
- Atmega32 Dev Board - EFY March11 PDFDocument7 pagesAtmega32 Dev Board - EFY March11 PDFsagar_gy100% (1)
- ECE 513 - PART1-Introduction To PIC16F84ADocument46 pagesECE 513 - PART1-Introduction To PIC16F84AMitch100% (1)
- Component DetailsDocument45 pagesComponent DetailsSHARANYANo ratings yet
- 8-Bit Microcontroller With 8K Bytes In-System Programmable Flash Atmega8535 Atmega8535L PreliminaryDocument19 pages8-Bit Microcontroller With 8K Bytes In-System Programmable Flash Atmega8535 Atmega8535L Preliminarymike_helplineNo ratings yet
- Essentials of Motors and Motor Driver: Interfacing Proximity Sensor With MotorDocument28 pagesEssentials of Motors and Motor Driver: Interfacing Proximity Sensor With MotorAli KhormiNo ratings yet
- 8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega162 Atmega162VDocument22 pages8-Bit Microcontroller With 16K Bytes In-System Programmable Flash Atmega162 Atmega162VSiddharth SharmaNo ratings yet
- Atmega128 16auDocument386 pagesAtmega128 16auNarintorn KanamoonNo ratings yet
- 8-Bit Microcontroller With 32K Bytes In-System Programmable Flash Atmega32ADocument18 pages8-Bit Microcontroller With 32K Bytes In-System Programmable Flash Atmega32Amiusuario_1022No ratings yet
- Self Study: Atmel Atmega128 Architecture: Anupama KR & Meetha.V.Shenoy Embedded System Design 8051Document5 pagesSelf Study: Atmel Atmega128 Architecture: Anupama KR & Meetha.V.Shenoy Embedded System Design 8051Shivam ShuklaNo ratings yet
- ATtiny 24Document238 pagesATtiny 24cbkulatungeNo ratings yet
- Lab 3Document6 pagesLab 3Vu LeNo ratings yet
- ATmega32 SummaryDocument18 pagesATmega32 SummaryRajesh KumarNo ratings yet
- Line Following RobotDocument54 pagesLine Following RobotGautam RaaviNo ratings yet
- SLS11Document27 pagesSLS11maneeshNo ratings yet
- Atmel Avr Xmega DDocument309 pagesAtmel Avr Xmega DRyosuke RaijiNo ratings yet
- Assigment 3Document2 pagesAssigment 3manhagNo ratings yet
- ATM Terminal Design Based On Figure Print Recognition DocuDocument115 pagesATM Terminal Design Based On Figure Print Recognition DocuPraveen NaiduNo ratings yet
- 1 Hardware and Its Working: ArduinoDocument10 pages1 Hardware and Its Working: ArduinoRakesh ChaurasiaNo ratings yet
- Code LockDocument94 pagesCode LockVaibhav AhujaNo ratings yet
- DC Motor Speed Control by AndroidDocument8 pagesDC Motor Speed Control by AndroidNikhil GaikwadNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- ProRes 422 WhitepaperDocument11 pagesProRes 422 WhitepaperffwdcoNo ratings yet
- Sentinel C28Document4 pagesSentinel C28aa0% (1)
- Charging SystemDocument10 pagesCharging SystemSteven Andrew ElamparoNo ratings yet
- Ful 56 Introducción A La Maquina ÍnternaDocument4 pagesFul 56 Introducción A La Maquina Ínternafernando rochaNo ratings yet
- Assignment Power ElectronicDocument21 pagesAssignment Power ElectronicSeth RathanakNo ratings yet
- Lc320exn Sca1Document36 pagesLc320exn Sca1My USERNAMENo ratings yet
- Smith Chart in Color - 2Document1 pageSmith Chart in Color - 2Andro Elnatan HarianjaNo ratings yet
- Honeywell Solar Modules Specsheet P72WDocument2 pagesHoneywell Solar Modules Specsheet P72WSanrasniNo ratings yet
- 1001 Solved Problems in Engineering MathematicsDocument10 pages1001 Solved Problems in Engineering MathematicsErrollNo ratings yet
- Gesture Recognition For Home AutomationDocument13 pagesGesture Recognition For Home AutomationShreyasi SarkarNo ratings yet
- Jain Thesis PDFDocument112 pagesJain Thesis PDFRonaldo CantonaNo ratings yet
- Zoho Entry ListDocument29 pagesZoho Entry ListDhaval DadhaniaNo ratings yet
- Read MeDocument2 pagesRead MeJunior ReisNo ratings yet
- SIM7X00 Series UART Application Note V1.00Document15 pagesSIM7X00 Series UART Application Note V1.00Javier GuevaraNo ratings yet
- Gravity Wave Detectors by Gregory HodowanecDocument33 pagesGravity Wave Detectors by Gregory Hodowaneconæss100% (3)
- Kajaani Mcai: User ManualDocument58 pagesKajaani Mcai: User ManualPauloNo ratings yet
- Introduction To Communication SystemDocument54 pagesIntroduction To Communication SystemOthmane MadaniNo ratings yet
- Dynamic Modeling of Diesel Generator Based On Electrical and Mechanical AspectsDocument7 pagesDynamic Modeling of Diesel Generator Based On Electrical and Mechanical AspectsHitesh JoshiNo ratings yet
- Rht-Probe Temperature and Humidity Sensor: MANUAL - V1.0xDocument1 pageRht-Probe Temperature and Humidity Sensor: MANUAL - V1.0xJonatan Allan Oliveira SouzaNo ratings yet
- 20-Port Mirroring CommandDocument10 pages20-Port Mirroring CommandArnon PipatbanjongNo ratings yet
- Maximizing The Transferred Power To Electric Arc Furnace For Having Maximum ProductionDocument8 pagesMaximizing The Transferred Power To Electric Arc Furnace For Having Maximum Productionteektak1No ratings yet
- Salwico IR Test Lamp: IR Flame Detector TesterDocument1 pageSalwico IR Test Lamp: IR Flame Detector TesterТарас АртюхNo ratings yet
- Electronics Module 2 Quarter 2Document7 pagesElectronics Module 2 Quarter 2Aldritz Peralta alagarmoNo ratings yet
- Manual Jaguar S-TypeDocument219 pagesManual Jaguar S-TypeSaulito Oxte EduardoNo ratings yet
- 311l Testing ProcedureDocument21 pages311l Testing ProcedureJoaquim AlvesNo ratings yet
- Entrada CA/Mains Input - 220VCA 2F + PE: Diagrama Elétrico SR - 48V/300ADocument1 pageEntrada CA/Mains Input - 220VCA 2F + PE: Diagrama Elétrico SR - 48V/300AantonioNo ratings yet
- Datasheet 98-8032-0 en 220v 50hzDocument61 pagesDatasheet 98-8032-0 en 220v 50hzmohon_eee03No ratings yet