Download as pdf or txt
You might also like
- BCS Business Analysis Pre-Course Reading PDFDocument71 pagesBCS Business Analysis Pre-Course Reading PDFMurali Ramakrishnan100% (4)
- FDS-0001-EN-DES-439-R000-REV01-0-Fire Detection Systems Fundamentals XLS140-XLS3000 Sys Progrm - Commission and Implm PDFDocument2 pagesFDS-0001-EN-DES-439-R000-REV01-0-Fire Detection Systems Fundamentals XLS140-XLS3000 Sys Progrm - Commission and Implm PDFNbalaji ThangamNo ratings yet
- Active Vibration Control of A Flexible Plate Structure Using Particle Swarm OptimizationDocument6 pagesActive Vibration Control of A Flexible Plate Structure Using Particle Swarm Optimizationcybervirus000No ratings yet
- Structural Health Monitoring of Aluminum Plate Using Acoustic SensorsDocument10 pagesStructural Health Monitoring of Aluminum Plate Using Acoustic SensorsMalolan VasudevanNo ratings yet
- Structural Health Monitoring Using Neural Network Based Vibrational System IdentificationDocument4 pagesStructural Health Monitoring Using Neural Network Based Vibrational System IdentificationManmatha KrishnanNo ratings yet
- Sy Ie Robotics CimDocument10 pagesSy Ie Robotics CimChow Jun XunNo ratings yet
- Pan 2018Document11 pagesPan 2018Ares ZhaoNo ratings yet
- A Single Objective Flower Pollination Algorithm For Modeling The Horizontal Flexible Plate SystemDocument6 pagesA Single Objective Flower Pollination Algorithm For Modeling The Horizontal Flexible Plate Systemcybervirus000No ratings yet
- A Hybrid Framework For Fault DetectionDocument10 pagesA Hybrid Framework For Fault DetectionharshaNo ratings yet
- Active Vibration Control of Ed Cantilever BeamDocument33 pagesActive Vibration Control of Ed Cantilever BeamCaner GençoğluNo ratings yet
- An On-Line Surface Vibration Monitoring System For AG SAG MillsDocument7 pagesAn On-Line Surface Vibration Monitoring System For AG SAG Millshasan70 sheykhiNo ratings yet
- Access 2018 2837621Document12 pagesAccess 2018 2837621salva NdongoNo ratings yet
- Preprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningDocument13 pagesPreprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningCesar Vargas ArayaNo ratings yet
- (Subrayado) Predictive - Maintenance - For - Wind - Turbine - Diagnostics - Using - Vibration - Signal - AnalysisDocument4 pages(Subrayado) Predictive - Maintenance - For - Wind - Turbine - Diagnostics - Using - Vibration - Signal - Analysismerecis920No ratings yet
- Stacked Multilevel-Denoising Autoencoders: A New Representation Learning Approach For Wind Turbine Gearbox Fault DiagnosisDocument12 pagesStacked Multilevel-Denoising Autoencoders: A New Representation Learning Approach For Wind Turbine Gearbox Fault Diagnosisaakash parasharNo ratings yet
- Integration of Artificial Intelligence Systems For Nuclear Power Plant Surveillance and DiagnosticsDocument9 pagesIntegration of Artificial Intelligence Systems For Nuclear Power Plant Surveillance and DiagnosticsskmrsanjeevNo ratings yet
- Implementation of Locally Weighted Projection Regression Network For Condition Monitoring of A Steam TurbineDocument4 pagesImplementation of Locally Weighted Projection Regression Network For Condition Monitoring of A Steam Turbinepurushothaman sinivasanNo ratings yet
- Chen 2012 - Smart - Struct16 - Controlador de Rede NeuralDocument7 pagesChen 2012 - Smart - Struct16 - Controlador de Rede NeuralGabriela BianchinNo ratings yet
- A Multistage Passive Islanding Detection Method For Synchronous-Based Distributed GenerationDocument11 pagesA Multistage Passive Islanding Detection Method For Synchronous-Based Distributed GenerationAjit kumar SahooNo ratings yet
- Vibration Rotating EquipmentDocument17 pagesVibration Rotating EquipmentNiwrad EtagramNo ratings yet
- Active Vibration Control of A Flexible Plate Structure Using Ant System AlgorithmDocument6 pagesActive Vibration Control of A Flexible Plate Structure Using Ant System Algorithmcybervirus000No ratings yet
- The Shock and Vibration Digest: Active Structural Vibration Control: A ReviewDocument18 pagesThe Shock and Vibration Digest: Active Structural Vibration Control: A ReviewBanjoNo ratings yet
- 3 - A Modular Transradial Bypass SocketDocument8 pages3 - A Modular Transradial Bypass SocketMichealowen BabygoalNo ratings yet
- Application of Backpropagation Neural Network For Spindle Vibration-Based Tool Wear Monitoring in Micro-MillingDocument9 pagesApplication of Backpropagation Neural Network For Spindle Vibration-Based Tool Wear Monitoring in Micro-MillingkhusseinNo ratings yet
- Cyber-Physical System Architecture For Machining Production LineDocument5 pagesCyber-Physical System Architecture For Machining Production LineMathew ChackoNo ratings yet
- Advanced Matrix Phased Arrays Settings For InspectionDocument8 pagesAdvanced Matrix Phased Arrays Settings For InspectionAngel IanaNo ratings yet
- 2267 Hay PDFDocument13 pages2267 Hay PDFHoang Duc ThucNo ratings yet
- Signal Fusion Based Deep Fast Random Forest Method - 2018 - Journal of ManufactuDocument8 pagesSignal Fusion Based Deep Fast Random Forest Method - 2018 - Journal of ManufactuSUNIL KUMARNo ratings yet
- Design, Control and Implementation of A Ball On Plate Balancing SystemDocument6 pagesDesign, Control and Implementation of A Ball On Plate Balancing SystemSara bhNo ratings yet
- Eren Et Al-2018-Journal of Signal Processing SystemsDocument12 pagesEren Et Al-2018-Journal of Signal Processing SystemsIvana MilašNo ratings yet
- 2009 - Damping Estimation Using Free Decays and Ambient Vibration Tests - 2009Document17 pages2009 - Damping Estimation Using Free Decays and Ambient Vibration Tests - 2009Guille Ciprian NoaNo ratings yet
- Multiagent ProtectionDocument9 pagesMultiagent ProtectionSamatha VedanaNo ratings yet
- Discrete Time ModelDocument10 pagesDiscrete Time ModelmuzammalNo ratings yet
- The Monitoring of A Lathe Using An Artificial Neural Network - 2 Part (The Training of An Artificial Neural Network and The Experimental Setup)Document8 pagesThe Monitoring of A Lathe Using An Artificial Neural Network - 2 Part (The Training of An Artificial Neural Network and The Experimental Setup)Mradul YadavNo ratings yet
- 2010-TBCAS-An Inductively Powered Scalable 32-Channel Wireless Neural Recording System-on-a-Chip For Neuroscience ApplicationsDocument12 pages2010-TBCAS-An Inductively Powered Scalable 32-Channel Wireless Neural Recording System-on-a-Chip For Neuroscience ApplicationsLuật TrầnNo ratings yet
- Automated Testing and Defect Classification in Phased-Array Inspection of Aluminum PlatesDocument6 pagesAutomated Testing and Defect Classification in Phased-Array Inspection of Aluminum PlatesraneshNo ratings yet
- 2013 2014 Report1Document64 pages2013 2014 Report1Christian Gonzalez ArandaNo ratings yet
- DownloadDocument7 pagesDownloadMartinoNo ratings yet
- Build Your Own Visual-Inertial Odometry Aided Cost-Effective and Open-Source Autonomous DroneDocument21 pagesBuild Your Own Visual-Inertial Odometry Aided Cost-Effective and Open-Source Autonomous DronewordfloNo ratings yet
- Substation GroundingDocument4 pagesSubstation Grounding'PeRsona NoUn GraTa'No ratings yet
- Dynamical Analysis and Synchronization Control of Flux Control - 2023 - ResultsDocument9 pagesDynamical Analysis and Synchronization Control of Flux Control - 2023 - Resultsronaldquezada038No ratings yet
- Embedded Deterministic Test For Low-Cost Manufacturing: IEEE Design and Test of Computers October 2003Document10 pagesEmbedded Deterministic Test For Low-Cost Manufacturing: IEEE Design and Test of Computers October 2003pavithrNo ratings yet
- A Neuro-Fuzzy Approach To Gear System Monitoring: Wilson Wang, Fathy Ismail, and Farid GolnaraghiDocument14 pagesA Neuro-Fuzzy Approach To Gear System Monitoring: Wilson Wang, Fathy Ismail, and Farid GolnaraghiPradeep KunduNo ratings yet
- Constructing Online Testable CircuitsDocument9 pagesConstructing Online Testable CircuitsNandita RajasekaranNo ratings yet
- Ijdmt: ©iaemeDocument13 pagesIjdmt: ©iaemeIAEME PublicationNo ratings yet
- Vibration Analysis of Electrical Rotating Machines Using FFTDocument6 pagesVibration Analysis of Electrical Rotating Machines Using FFTOnur FilizoğluNo ratings yet
- WF-IoT 2018 8355094Document5 pagesWF-IoT 2018 8355094masanta11No ratings yet
- Measures of Location Effectiveness of Vibration Absorbers: January 2002Document2 pagesMeasures of Location Effectiveness of Vibration Absorbers: January 2002wp ggNo ratings yet
- 1 s2.0 S0141635912000542 MainDocument106 pages1 s2.0 S0141635912000542 MainsamikhereNo ratings yet
- Real-Time Vibration-Based Structural Damage Detection Using One-Dimensional Convolutional Neural NetworksDocument17 pagesReal-Time Vibration-Based Structural Damage Detection Using One-Dimensional Convolutional Neural Networksjj zhuNo ratings yet
- An Engine Fault Diagnosis System Using Intake Manifold Pressure Signal and Wigner-Ville Distribution TechniqueDocument9 pagesAn Engine Fault Diagnosis System Using Intake Manifold Pressure Signal and Wigner-Ville Distribution TechniqueJean Carlos PinedaNo ratings yet
- Shaker Vibration TestingDocument2 pagesShaker Vibration Testingejzuppelli8036No ratings yet
- New Sensor Technology For Measuring Torsional Shaft Vibration in Turbine GeneratorsDocument8 pagesNew Sensor Technology For Measuring Torsional Shaft Vibration in Turbine GeneratorssebastianNo ratings yet
- Bolt 1Document10 pagesBolt 1Shawn WaltzNo ratings yet
- The Design and Implement of Acoustic Array Sensor Network Platform For Online Multi-Target TrackingDocument6 pagesThe Design and Implement of Acoustic Array Sensor Network Platform For Online Multi-Target TrackingsumathyNo ratings yet
- Frequency Domain Techniques For Operational Modal AnalysisDocument10 pagesFrequency Domain Techniques For Operational Modal AnalysisAhmed BaheiNo ratings yet
- Sensor Failure Detection Identification and Accommodation Using Fully Connected Cascade Neural NetworkDocument10 pagesSensor Failure Detection Identification and Accommodation Using Fully Connected Cascade Neural NetworkBayram TasdelenNo ratings yet
- A Low-Cost Multielectrode System For Data Acquisition Enabling Real-Time Closed-Loop Processing With Rapid Recovery From Stimulation ArtifactsDocument17 pagesA Low-Cost Multielectrode System For Data Acquisition Enabling Real-Time Closed-Loop Processing With Rapid Recovery From Stimulation ArtifactsJelena M.No ratings yet
- 63409Document7 pages63409Joshua BonasuhulNo ratings yet
- Control of Vibration in Civil StructuresDocument15 pagesControl of Vibration in Civil Structuresoscar201140No ratings yet
- Electronics 12 04302 v2Document13 pagesElectronics 12 04302 v2Eswariah VannamNo ratings yet
- OpenSees TutorialDocument7 pagesOpenSees TutorialAlan AlonsoNo ratings yet
- Toward Component Based Software EngineeringDocument13 pagesToward Component Based Software EngineeringRISHIKA SINHANo ratings yet
- Ijsrp p4671 PDFDocument5 pagesIjsrp p4671 PDFsunil nemaNo ratings yet
- Structuring The Asset Management Based On ISO 55001 and ISO 31000: Where To Start?Document6 pagesStructuring The Asset Management Based On ISO 55001 and ISO 31000: Where To Start?Jairo Castro FlorianNo ratings yet
- HCI - Gattech09 Cognitive Model GOMSDocument36 pagesHCI - Gattech09 Cognitive Model GOMSAdarsh SrivastavaNo ratings yet
- PROG-111 Week 1-9Document89 pagesPROG-111 Week 1-9Jaspher0% (1)
- Online Voting System SynopsisDocument31 pagesOnline Voting System SynopsisAastiNo ratings yet
- Unit: 2 Approaches and Methods of Comparative Education Problem Solving TechniqueDocument29 pagesUnit: 2 Approaches and Methods of Comparative Education Problem Solving TechniqueSyeda ToobaNo ratings yet
- Class DiagramsDocument15 pagesClass DiagramsPathanjaliChowdaiahNo ratings yet
- Case StdyDocument16 pagesCase StdyHailu TamirNo ratings yet
- Fire Protection EngineeringDocument4 pagesFire Protection EngineeringAmir ShaikNo ratings yet
- Introduction From The Arms of The FutureDocument12 pagesIntroduction From The Arms of The FutureMiljenko SimicNo ratings yet
- Cprog 2 - ComputerProgramming2 02 1920Document6 pagesCprog 2 - ComputerProgramming2 02 1920Glenn Josue FrencilloNo ratings yet
- Political Environment BE5: Pushkar BajracharyaDocument14 pagesPolitical Environment BE5: Pushkar BajracharyaStraightedge KadayatNo ratings yet
- Submission Course Offerings 1st Sem 16 17-Aug4 16Document2 pagesSubmission Course Offerings 1st Sem 16 17-Aug4 16Fahmie PagayawanNo ratings yet
- Review of Supply Chain Management Within Project ManagementDocument12 pagesReview of Supply Chain Management Within Project ManagementLaurent LaurencierNo ratings yet
- Representational Systems and Practices As Learning Tools PDFDocument48 pagesRepresentational Systems and Practices As Learning Tools PDFIván SaucedoNo ratings yet
- Thermodynamics: AllenDocument9 pagesThermodynamics: AllenronakNo ratings yet
- Multi-Resolution Modeling For Supply ChainDocument13 pagesMulti-Resolution Modeling For Supply ChainMubashir SheheryarNo ratings yet
- Simulink Fundamentals PDFDocument7 pagesSimulink Fundamentals PDF123456No ratings yet
- Appointment and Workload Management SystemDocument50 pagesAppointment and Workload Management Systemprueba222222No ratings yet
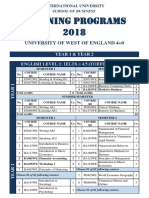
- Twinning Programs 2018: University of West of England 4+0Document7 pagesTwinning Programs 2018: University of West of England 4+0Ánh ĐỗNo ratings yet
- Syllabus DBTDocument10 pagesSyllabus DBTpankajhydNo ratings yet
- Course Introduction System Analysis and DesignDocument4 pagesCourse Introduction System Analysis and DesignhibbuhNo ratings yet
- Scheduling Workload Dynamically: IBM Tivoli Workload SchedulerDocument78 pagesScheduling Workload Dynamically: IBM Tivoli Workload SchedulerATC ThalesNo ratings yet
- Presentation ThemeDocument8 pagesPresentation ThemeHilal Al HinaiNo ratings yet
- UNMS Software SpecificationsDocument41 pagesUNMS Software SpecificationsChief Engineer PRTINo ratings yet
- Diagnosis System For Disease in WheatDocument10 pagesDiagnosis System For Disease in WheatTucha KedirNo ratings yet