Download as pdf or txt
You might also like
- 1 s2.0 S0029801823007941 MainDocument16 pages1 s2.0 S0029801823007941 MainjianyurenNo ratings yet
- FAA - Engineering DesigneeDocument104 pagesFAA - Engineering DesigneeSaraNo ratings yet
- We Are Learning Turkish Turkce OgreniyorDocument89 pagesWe Are Learning Turkish Turkce OgreniyorSaraNo ratings yet
- ReportDocument19 pagesReportRitvik Dobriyal100% (1)
- Lecturenote F13Document159 pagesLecturenote F13rohitNo ratings yet
- A Dynamic Stability Rocket SimulatorDocument16 pagesA Dynamic Stability Rocket SimulatorĐăng Khôi TrầnNo ratings yet
- Chapter 10 - StabilityDocument36 pagesChapter 10 - StabilityRezwan Ahmed KhanNo ratings yet
- WE-ARE-LEARNING-TURKISHVolume 4 PDFDocument147 pagesWE-ARE-LEARNING-TURKISHVolume 4 PDFRocío Mora Mora GomezNo ratings yet
- Numerical Analysis of Wing Spar DesignDocument63 pagesNumerical Analysis of Wing Spar DesignManepalli Harshavardhanan100% (1)
- Aeronautical Engineering Units 130710Document63 pagesAeronautical Engineering Units 130710maitham1000% (1)
- Enigma of The Aerofoil A ReviewDocument4 pagesEnigma of The Aerofoil A ReviewJames RaitNo ratings yet
- LecturenoteF14 PDFDocument159 pagesLecturenoteF14 PDFAnh NguyenNo ratings yet
- StabilityDocument70 pagesStabilityHari Manoj Ram GandrothuNo ratings yet
- Stability and Control: Outline of This ChapterDocument21 pagesStability and Control: Outline of This ChaptergarridolopezNo ratings yet
- Empennage Sizing and Aircraft Stability Using MatlabDocument37 pagesEmpennage Sizing and Aircraft Stability Using MatlabRoxana VoicuNo ratings yet
- Flight Dynamics (Fixed Wing Aircraft)Document17 pagesFlight Dynamics (Fixed Wing Aircraft)MOFEEZALAM100% (1)
- Aircraft StabilityDocument126 pagesAircraft StabilitymunirnadirNo ratings yet
- Unit-5 Elements of Aeroelasticity by G.Velmurugan AP/AeroDocument21 pagesUnit-5 Elements of Aeroelasticity by G.Velmurugan AP/AeroveluNo ratings yet
- GATE Aerospace Coaching by Team IGC Aircraft StabilityDocument13 pagesGATE Aerospace Coaching by Team IGC Aircraft StabilityNISHANT100% (1)
- Aircraft Stability and Control - Lec02 PDFDocument12 pagesAircraft Stability and Control - Lec02 PDFHaidar HeroNo ratings yet
- AutostabilizerDocument21 pagesAutostabilizerPushkala RaviNo ratings yet
- SkyWay Otvety Na VoprosiDocument14 pagesSkyWay Otvety Na VoprosiVladNo ratings yet
- ASC-mod 3-Dynamic Longitudinal StabilityDocument32 pagesASC-mod 3-Dynamic Longitudinal StabilityJason JeevanNo ratings yet
- ASC-mod 3-Static Directional Stability and ControlDocument16 pagesASC-mod 3-Static Directional Stability and ControlJason JeevanNo ratings yet
- Weight & Balance (16 Aug 08)Document100 pagesWeight & Balance (16 Aug 08)aftab_sweet3024No ratings yet
- Aircraft Stability and ControlDocument14 pagesAircraft Stability and Controlkriscortez05100% (3)
- Chap 5 - Flight StabilityDocument52 pagesChap 5 - Flight Stabilitydada1020chapmanNo ratings yet
- Equilibrium Is A State of An Object When It Is at Rest or in Steady Uniform Motion, (I.e., With Constant Linear and Angular Momenta)Document21 pagesEquilibrium Is A State of An Object When It Is at Rest or in Steady Uniform Motion, (I.e., With Constant Linear and Angular Momenta)mentcerNo ratings yet
- Pitching MomentDocument3 pagesPitching MomentAEX3 111No ratings yet
- Flight, Manouver PerformanceDocument18 pagesFlight, Manouver PerformanceMuhammad Ali IdrisNo ratings yet
- Flight DynamicsDocument12 pagesFlight Dynamicsthomasvictor2005No ratings yet
- Stablity, Control and LimitationsDocument359 pagesStablity, Control and LimitationsgadisaNo ratings yet
- Lecture 27 - FlutterDocument11 pagesLecture 27 - FlutterJony Oliver Lazo RamosNo ratings yet
- Missile Autopilot AerodynamicsDocument12 pagesMissile Autopilot AerodynamicsD.ViswanathNo ratings yet
- Basic Lift FormulaDocument3 pagesBasic Lift FormuladillamyNo ratings yet
- Aca Module-1 ChatgptDocument25 pagesAca Module-1 Chatgpt20951a2141No ratings yet
- Aviation MechanicsDocument16 pagesAviation MechanicsScribdTranslationsNo ratings yet
- Pitch StabilityDocument6 pagesPitch StabilityAirPlaneTrainMobileNo ratings yet
- aEROSPACE NOTESDocument2 pagesaEROSPACE NOTESAryan PandeyNo ratings yet
- lec19Document14 pageslec19RUDRESH SINGHNo ratings yet
- Longitudinal Static Stability: Program Studi Teknik Penerbangan Sekolah Tinggi Teknologi Adisutjipto 2016Document27 pagesLongitudinal Static Stability: Program Studi Teknik Penerbangan Sekolah Tinggi Teknologi Adisutjipto 2016Alrino Dwi PrasetyoNo ratings yet
- Flight Demonstration Wind Tunnel Lab ReportDocument5 pagesFlight Demonstration Wind Tunnel Lab Reportromesaali23No ratings yet
- Flat Earth ModelDocument11 pagesFlat Earth ModelversineNo ratings yet
- 5 Asymmetric Flight PDFDocument11 pages5 Asymmetric Flight PDFAvinash Kumar100% (1)
- Aerodynamics: Presented By: Ahmad HaririDocument47 pagesAerodynamics: Presented By: Ahmad HaririAHMAD100% (1)
- Conditions of EquilibriumDocument5 pagesConditions of EquilibriumAshutosh KumarNo ratings yet
- Topic 5 Wing-Design Page 18Document1 pageTopic 5 Wing-Design Page 18thomastan02No ratings yet
- ASC 1 DrAPDocument32 pagesASC 1 DrAPupamnyu KalburgiNo ratings yet
- Effective Dihedral PDFDocument22 pagesEffective Dihedral PDFAngel Villalonga MoralesNo ratings yet
- Equations of Airplane Motion in Trajectory Coordinate System in Particular Cases. Aerodynamic Calculation of An Aircraft. Zhukovsky Method of ThrustsDocument10 pagesEquations of Airplane Motion in Trajectory Coordinate System in Particular Cases. Aerodynamic Calculation of An Aircraft. Zhukovsky Method of ThrustsJason RossNo ratings yet
- Aerodynamics IDocument48 pagesAerodynamics IDivya Krishnan100% (1)
- Pof ZadabdolahDocument80 pagesPof Zadabdolahrozhinhadi63No ratings yet
- 1.1 Background of The StudyDocument3 pages1.1 Background of The StudyJustine SawilNo ratings yet
- Helicopter StabilityDocument13 pagesHelicopter Stabilitymanikandan_murugaiahNo ratings yet
- Aerodynamic of Finite WingDocument22 pagesAerodynamic of Finite WingchbeggyNo ratings yet
- Design NDocument59 pagesDesign NlilacbtchNo ratings yet
- FM IiDocument66 pagesFM IiJeeva's GamingNo ratings yet
- What Makes Airplanes Fly Notes On The Whole AirplaneDocument16 pagesWhat Makes Airplanes Fly Notes On The Whole AirplaneasdfagNo ratings yet
- Lateral Stability DerivativesDocument5 pagesLateral Stability DerivativesCodenameairi AllyNo ratings yet
- Aircraft 1Document13 pagesAircraft 1J.a. RumiNo ratings yet
- 8-4 Flight Stability and Dynamics - B1 B2Document46 pages8-4 Flight Stability and Dynamics - B1 B2saleemyanal61No ratings yet
- Practical Lab # 6. Measurement of Drag and Lift of An Aerofoil at Different Angles of AttackDocument7 pagesPractical Lab # 6. Measurement of Drag and Lift of An Aerofoil at Different Angles of Attackamanuelfitsum589No ratings yet
- Principle of Stability and Control: Introduction To Aeronautical Engineering AERN 111Document31 pagesPrinciple of Stability and Control: Introduction To Aeronautical Engineering AERN 111Ahmed abdelgalilNo ratings yet
- Asymmetric FlightDocument11 pagesAsymmetric Flightpei3721No ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Model aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipFrom EverandModel aeroplanes: The building of model monoplanes, biplanes, etc., together with a chapter on building a model airshipNo ratings yet
- Lecture 3Document98 pagesLecture 3SaraNo ratings yet
- Chapter 4 BASIC AERODYNAMICSDocument20 pagesChapter 4 BASIC AERODYNAMICSSaraNo ratings yet
- United States Patent: (45) Date of Patent: Sep - 19, 2017Document24 pagesUnited States Patent: (45) Date of Patent: Sep - 19, 2017SaraNo ratings yet
- Chapter 6 Elements of Airplane PerformanceDocument17 pagesChapter 6 Elements of Airplane PerformanceSaraNo ratings yet
- AE1102 Structures Slides 5Document27 pagesAE1102 Structures Slides 5SaraNo ratings yet
- Chapter 5 Airfoils Wings and Other Aerodynamic ShapesDocument22 pagesChapter 5 Airfoils Wings and Other Aerodynamic ShapesSaraNo ratings yet
- Graham White - R-2800 - Pratt and Whitney's Dependable Masterpiece (Premiere Series Books) - SAE International (2001)Document746 pagesGraham White - R-2800 - Pratt and Whitney's Dependable Masterpiece (Premiere Series Books) - SAE International (2001)Sara100% (1)
- Fundamentals of Propulsion BabuDocument164 pagesFundamentals of Propulsion BabuSara50% (2)
- M04-041 - Fundamentals of Gas Turbine Engines - USDocument66 pagesM04-041 - Fundamentals of Gas Turbine Engines - USSaraNo ratings yet
- Fluid MechanicsDocument23 pagesFluid MechanicsSaraNo ratings yet
- National Advisory Committee J$° For Aeronautics: Pfinnnfthft 1 S IDocument21 pagesNational Advisory Committee J$° For Aeronautics: Pfinnnfthft 1 S ISaraNo ratings yet
- "Rige.") Assistant Examiner Viet Le: (12) United States Patent (10) Patent No.: Us 9,108,738 B1Document24 pages"Rige.") Assistant Examiner Viet Le: (12) United States Patent (10) Patent No.: Us 9,108,738 B1SaraNo ratings yet
- Mig-21Bis: 1/48 Scale Plastic Model KitDocument20 pagesMig-21Bis: 1/48 Scale Plastic Model KitSaraNo ratings yet
- United States Patent: Al-SabahDocument27 pagesUnited States Patent: Al-SabahSaraNo ratings yet
- 20030064135Document66 pages20030064135SaraNo ratings yet
- National Advisory Commime For Aeronautics: Technical Note 3530Document12 pagesNational Advisory Commime For Aeronautics: Technical Note 3530SaraNo ratings yet
- Previous Page Table of Contents Next PageDocument16 pagesPrevious Page Table of Contents Next PageSaraNo ratings yet
- Engineering Engine/Airframe Integration For Fully Reusable Space Transportation SystemsDocument43 pagesEngineering Engine/Airframe Integration For Fully Reusable Space Transportation SystemsSaraNo ratings yet
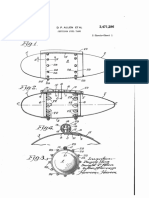
- Afo Z.: May 24, 1949. D. P. Alen Eta 2,471,296Document5 pagesAfo Z.: May 24, 1949. D. P. Alen Eta 2,471,296SaraNo ratings yet
- Exterior Finishes, Insignia and Markings, Applicable To Usaf AircraftDocument176 pagesExterior Finishes, Insignia and Markings, Applicable To Usaf AircraftSaraNo ratings yet
- June 3, 1947. C. L., Johnson 2,421,699: 4-Z4A2M/Z.Z. AwazwDocument8 pagesJune 3, 1947. C. L., Johnson 2,421,699: 4-Z4A2M/Z.Z. AwazwSaraNo ratings yet
- SAO2020 FCS Brochure Aircraft Fuel Systems CapabilitiesDocument94 pagesSAO2020 FCS Brochure Aircraft Fuel Systems CapabilitiesSaraNo ratings yet
- Title 9057.02.: Plant)Document52 pagesTitle 9057.02.: Plant)SaraNo ratings yet
- Lim Dongwook 200905 PHDDocument415 pagesLim Dongwook 200905 PHDSaraNo ratings yet
- External Aircraft Fuel Tanks/Cells: Technical ManualDocument48 pagesExternal Aircraft Fuel Tanks/Cells: Technical ManualSaraNo ratings yet
- AA283 Aircraft and Rocket Propulsion: Chapter 3 - The Ramjet CycleDocument72 pagesAA283 Aircraft and Rocket Propulsion: Chapter 3 - The Ramjet CycleSaraNo ratings yet
- SR-71 Blackbird Operations ManualDocument46 pagesSR-71 Blackbird Operations ManualSaraNo ratings yet
- 1955 3 EngDocument21 pages1955 3 EngTateNo ratings yet
- Small Wind Turbines For The Built EnvironmentDocument9 pagesSmall Wind Turbines For The Built EnvironmentAmanuel BehailuNo ratings yet
- Research Paper On Vehicle AerodynamicsDocument9 pagesResearch Paper On Vehicle Aerodynamicsikrndjvnd100% (1)
- Troubleshooting and Rectification of A C3 Splitter TowerDocument25 pagesTroubleshooting and Rectification of A C3 Splitter TowerparykoochakNo ratings yet
- Fractal Impeller Amol KulkarniDocument10 pagesFractal Impeller Amol KulkarniTej ChoksiNo ratings yet
- Nasa On Coanda Effect PDFDocument56 pagesNasa On Coanda Effect PDFShatha SivamNo ratings yet
- A Reduction in The Pilots Effort To Move The Controls Against High Air LoadsDocument26 pagesA Reduction in The Pilots Effort To Move The Controls Against High Air LoadsGonçalo FernandesNo ratings yet
- Chapter-2 Principle of FlightDocument8 pagesChapter-2 Principle of FlightAgastia imranNo ratings yet
- Aerial Robotics 1Document19 pagesAerial Robotics 1Gurpreet Singh AnttalNo ratings yet
- Steinegger Fuel Economy As A Function of Weight and Distance v1-1Document11 pagesSteinegger Fuel Economy As A Function of Weight and Distance v1-1VodanhNguoiNo ratings yet
- General Physics 1: Quarter 2 - Module 7.1: Bernoulli's PrincipleDocument24 pagesGeneral Physics 1: Quarter 2 - Module 7.1: Bernoulli's PrincipleRiane Carson Jay BorlagdanNo ratings yet
- Applying Mdo To Classical Conceptual Aircraft Design MethodologiesDocument109 pagesApplying Mdo To Classical Conceptual Aircraft Design MethodologieseduserenzaNo ratings yet
- Natural Flow and Artificial LiftDocument31 pagesNatural Flow and Artificial Liftsetemi_obatoki100% (1)
- Wing LetsDocument8 pagesWing LetsRuslan AganiNo ratings yet
- Hydrodynamic Characteristics of Twin-Rudders at Small Attack AnglesDocument13 pagesHydrodynamic Characteristics of Twin-Rudders at Small Attack Anglesebey_endunNo ratings yet
- Chapter 48. Wing in Ground (WIG) CraftDocument23 pagesChapter 48. Wing in Ground (WIG) CraftThiago BentoNo ratings yet
- PeakOfFlight 442 Fin ShapesDocument11 pagesPeakOfFlight 442 Fin Shapesl239022No ratings yet
- L03 Teaching AerodynamicsDocument20 pagesL03 Teaching AerodynamicsDragan Lazic100% (1)
- Bertazzoni LiftIcaroH TMDocument36 pagesBertazzoni LiftIcaroH TMaldrine dela cruzNo ratings yet
- How Does A Boomerang WorkDocument15 pagesHow Does A Boomerang WorkspaceskipperNo ratings yet
- Flight Unit PlanDocument10 pagesFlight Unit Planapi-308418238No ratings yet
- Doctor in PrintingDocument57 pagesDoctor in PrintingKeerthanaNo ratings yet
- Class16 2012Document7 pagesClass16 2012THƯ CAO HOÀNG MINHNo ratings yet
- CFDDocument5 pagesCFDprabs20069178No ratings yet
- 2020 Shape Optimization of SG6043 Airfoil For Small Wind Turbine BladesDocument11 pages2020 Shape Optimization of SG6043 Airfoil For Small Wind Turbine BladesKarthik JNo ratings yet