
Towards The Geological Parametrization of Seismic
Towards The Geological Parametrization of Seismic
You might also like
- I Visited Ganymede - Yosip IbrahimDocument70 pagesI Visited Ganymede - Yosip IbrahimhumanresonanceNo ratings yet
- Aution Eleven АЕ-4020 SM PDFDocument272 pagesAution Eleven АЕ-4020 SM PDFНиколайКрыловNo ratings yet
- 11th GateDocument48 pages11th GateSamejiel Aseviel LajesielNo ratings yet
- Mathematical Modeling of Earth's Dynamical Systems: A PrimerFrom EverandMathematical Modeling of Earth's Dynamical Systems: A PrimerRating: 3 out of 5 stars3/5 (1)
- Linear Control System Lab: Utilizing Simulink To Implement The Mathematical Model of Translational Mechanical SystemDocument8 pagesLinear Control System Lab: Utilizing Simulink To Implement The Mathematical Model of Translational Mechanical SystemMuhammad Saad AbdullahNo ratings yet
- Seismic Data Interpretation Using The Hough Transform and Principal Component AnalysisDocument14 pagesSeismic Data Interpretation Using The Hough Transform and Principal Component AnalysisDaniel OrdazNo ratings yet
- Whole-Mantle Radially Anisotropic Shear Velocity Structure From Spectral-Element Waveform TomographyDocument25 pagesWhole-Mantle Radially Anisotropic Shear Velocity Structure From Spectral-Element Waveform Tomographydj zaman nowNo ratings yet
- Hasterok Et Al 2022 New Maps of Global Geological Provinces and Tectonic PlatesDocument35 pagesHasterok Et Al 2022 New Maps of Global Geological Provinces and Tectonic PlateskarineNo ratings yet
- 2013 - A J Schaeffer - Globalshearspeedstructureoftheuppermantleandtransi (Retrieved 2018-03-27)Document33 pages2013 - A J Schaeffer - Globalshearspeedstructureoftheuppermantleandtransi (Retrieved 2018-03-27)lulu birdNo ratings yet
- GGZ 204Document16 pagesGGZ 204deepak kumarNo ratings yet
- Applied Geochemistry: Renguang Zuo, Qinglin Xia, Haicheng WangDocument10 pagesApplied Geochemistry: Renguang Zuo, Qinglin Xia, Haicheng WangVICTOR ANDRE SALINAS HERRERANo ratings yet
- Deep Learning For Seismic Lithology PredictionDocument20 pagesDeep Learning For Seismic Lithology Predictionth26wczxfipm0ql01wNo ratings yet
- Seismic MigrationDocument77 pagesSeismic Migrationnaivedya_mishra100% (2)
- Originally Published As:: Geophysical Journal International, 212, 3, Pp. 1645-1656Document13 pagesOriginally Published As:: Geophysical Journal International, 212, 3, Pp. 1645-1656Adam Sukma PutraNo ratings yet
- 1 s2.0 S0012821X15005300 MainDocument11 pages1 s2.0 S0012821X15005300 MainJorge D. MarquesNo ratings yet
- Carollo 2020Document21 pagesCarollo 2020mafer11 Reyes OnceNo ratings yet
- Fault Interpretation in Seismic Reflection Data An PDFDocument12 pagesFault Interpretation in Seismic Reflection Data An PDFHhhh JjjjNo ratings yet
- The Application of Outcrop Analogues in Geological Modelling A Review Present Status and FutureDocument25 pagesThe Application of Outcrop Analogues in Geological Modelling A Review Present Status and FutureAbdul Bari QanitNo ratings yet
- A SPICE Blind Test To Benchmark Global Tomographic Methods: November 2006Document20 pagesA SPICE Blind Test To Benchmark Global Tomographic Methods: November 2006Eddie Rio CokerNo ratings yet
- Deep Learning For Characterizing Paleokarst Collapse Features in 3-D Seismic ImagesDocument23 pagesDeep Learning For Characterizing Paleokarst Collapse Features in 3-D Seismic ImagesMaxwell SmartNo ratings yet
- Integrated Velocity Field From Ground and Satellite Geodetic Techniques-Application To Arenal VolcanoDocument18 pagesIntegrated Velocity Field From Ground and Satellite Geodetic Techniques-Application To Arenal VolcanoJorgeNo ratings yet
- Accounting For Prediction Uncertainty When Inferring Subsurface Fault SlipDocument19 pagesAccounting For Prediction Uncertainty When Inferring Subsurface Fault SlipFernando NiñoNo ratings yet
- A Successive Three Point Perturbation Method For Fast Ray Tracing in Complex 2D and 3D Geological Models - 2014 - TectonophysicsDocument10 pagesA Successive Three Point Perturbation Method For Fast Ray Tracing in Complex 2D and 3D Geological Models - 2014 - TectonophysicsMohamed AtawaNo ratings yet
- Probabilistic Seismic Source Inversion From Regional Landslide EvidenceDocument13 pagesProbabilistic Seismic Source Inversion From Regional Landslide EvidenceBrettNo ratings yet
- Volcanic and Seismic Source Modeling An Open ToolDocument18 pagesVolcanic and Seismic Source Modeling An Open ToolNiniane zhangNo ratings yet
- 1 6 EtsreDocument10 pages1 6 EtsreFrancolt41No ratings yet
- Artigo - Cnudde (2011) - 3D Characterization of Sandstone by Means of X-Ray Computed TomographyDocument9 pagesArtigo - Cnudde (2011) - 3D Characterization of Sandstone by Means of X-Ray Computed TomographyAdilson GonçalvesNo ratings yet
- ARMA 2018-15 University of BaghdadDocument10 pagesARMA 2018-15 University of BaghdadFarqad AliNo ratings yet
- Augarde Et Al 2021 - J - Numerical Modelling of Large Deformation Problems in Geotechnical Engineering - A State-Of-The-Art ReviewDocument18 pagesAugarde Et Al 2021 - J - Numerical Modelling of Large Deformation Problems in Geotechnical Engineering - A State-Of-The-Art Reviewsriram narendranNo ratings yet
- Feart 10 1058386Document14 pagesFeart 10 1058386Eduardo MonsalvezNo ratings yet
- Cross Gradien JSIDocument12 pagesCross Gradien JSIPAUL RODRIGUEZNo ratings yet
- Małkowski - Article - A Statistical Analysis of GeomechaDocument12 pagesMałkowski - Article - A Statistical Analysis of GeomechaAriNo ratings yet
- Cao 2017Document27 pagesCao 2017Kevin RiosNo ratings yet
- Muller Etal 2015Document18 pagesMuller Etal 2015Proyectos ECMNo ratings yet
- 1 s2.0 S0169555X21002117 MainDocument16 pages1 s2.0 S0169555X21002117 Mainsiska ameliaNo ratings yet
- 1-s2.0-S0169555X12005594-main UAVDocument16 pages1-s2.0-S0169555X12005594-main UAVBilly ZarateNo ratings yet
- Geo 2021 0551.1Document14 pagesGeo 2021 0551.1deepak kumarNo ratings yet
- Bourges Et Al, 2012Document13 pagesBourges Et Al, 2012Maria Fernanda Landa ElizaldeNo ratings yet
- 2019JGR WangJN WuGX CXFDocument17 pages2019JGR WangJN WuGX CXFVanessa BiondoNo ratings yet
- d71c PaperDocument9 pagesd71c PaperIvan ReneNo ratings yet
- Cori Glia No 2012Document23 pagesCori Glia No 2012Saroj Kumar SahuNo ratings yet
- Engineering Geology: Young-Kwang Yeon, Jong-Gyu Han, Keun Ho RyuDocument10 pagesEngineering Geology: Young-Kwang Yeon, Jong-Gyu Han, Keun Ho RyuOyunbiligt BaatarNo ratings yet
- 10.1007/s12665 013 2653 ZDocument14 pages10.1007/s12665 013 2653 ZAnre Thanh HungNo ratings yet
- Combining Geologic Process Models and Geostatistics For Conditional Simulation of 3 D Subsurface HeterogeneityDocument20 pagesCombining Geologic Process Models and Geostatistics For Conditional Simulation of 3 D Subsurface HeterogeneityngueleNo ratings yet
- Wobus Et Al, 2006Document21 pagesWobus Et Al, 2006mauricio espinozaNo ratings yet
- A Novel Approach To Probabilistic Seismic Landslide Hazard Mapping UsingDocument12 pagesA Novel Approach To Probabilistic Seismic Landslide Hazard Mapping UsingAojie FengNo ratings yet
- Reverse Time Migration From Irregular Surface by Flattening Surface Topography - 2014 - TectonophysicsDocument12 pagesReverse Time Migration From Irregular Surface by Flattening Surface Topography - 2014 - TectonophysicsMohamed AtawaNo ratings yet
- Journal of Geophysical Research Earth Surface - 2010 - Passalacqua - A Geometric Framework For Channel Network ExtractionDocument18 pagesJournal of Geophysical Research Earth Surface - 2010 - Passalacqua - A Geometric Framework For Channel Network ExtractionKiran SriramNo ratings yet
- Particle size effects on small-scale avalanches and a μ (I) rheology-based simulationDocument12 pagesParticle size effects on small-scale avalanches and a μ (I) rheology-based simulation丫丫衣衣No ratings yet
- Xu 2010Document10 pagesXu 2010VICTOR MANUEL URIBE CORDOVANo ratings yet
- 1 s2.0 S0169555X23002581 MainDocument8 pages1 s2.0 S0169555X23002581 MainJorge D. MarquesNo ratings yet
- Automatic Extraction of Discontinuity Orientation From Rock MassDocument14 pagesAutomatic Extraction of Discontinuity Orientation From Rock MassoscarNo ratings yet
- Artigo 11 Comparative Study On Calculation Methods of Blasting Vibration VelocityRock Mechanics and Rock EngineeringDocument9 pagesArtigo 11 Comparative Study On Calculation Methods of Blasting Vibration VelocityRock Mechanics and Rock EngineeringCléverson TrindadeNo ratings yet
- Engineering Geology: Yu Wang, Siu-Kui Au, Zijun CaoDocument10 pagesEngineering Geology: Yu Wang, Siu-Kui Au, Zijun CaoSilvanaMontoyaNogueraNo ratings yet
- 1 s2.0 S0266352X20302202 MainDocument9 pages1 s2.0 S0266352X20302202 Mainnhan nguyenNo ratings yet
- Computers & Geosciences: Bryan S.A. Tatone, Giovanni GrasselliDocument17 pagesComputers & Geosciences: Bryan S.A. Tatone, Giovanni Grasselliroshansm1978No ratings yet
- Computers & Geosciences: Bryan S.A. Tatone, Giovanni GrasselliDocument17 pagesComputers & Geosciences: Bryan S.A. Tatone, Giovanni GrasselliMarcos MaNo ratings yet
- Bayesian Rpi Mat GeoDocument56 pagesBayesian Rpi Mat GeoNonato Colares ColaresNo ratings yet
- Session Report - Geophysics 1Document8 pagesSession Report - Geophysics 1NugNo ratings yet
- KernelDocument11 pagesKernelSajid MehmoodNo ratings yet
- 2022 Cross-Correlation Stacking-Based Microseismic Source Location Using Three Metaheuristic Optimization AlgorithmsDocument15 pages2022 Cross-Correlation Stacking-Based Microseismic Source Location Using Three Metaheuristic Optimization Algorithms周牮No ratings yet
- Variational Bayesian Experimental Design For Geophysical Applications Seismic Source Location, Amplitude Versus Offset Inversion, and Estimating CO2 Saturations in A Subsurface ReservoirDocument23 pagesVariational Bayesian Experimental Design For Geophysical Applications Seismic Source Location, Amplitude Versus Offset Inversion, and Estimating CO2 Saturations in A Subsurface Reservoirricit48236No ratings yet
- A Geometric Framework For Channel Network ExtractiDocument19 pagesA Geometric Framework For Channel Network ExtractiArthur KayNo ratings yet
- REM Geo&Man Comp 2016Document350 pagesREM Geo&Man Comp 2016youungNo ratings yet
- Grundfos CR 15 2 A F A e HqqeDocument11 pagesGrundfos CR 15 2 A F A e HqqeFKIANo ratings yet
- King Solomons College S4 Physics SeminarDocument11 pagesKing Solomons College S4 Physics SeminarDaniel MarkNo ratings yet
- Pile CapDocument44 pagesPile Capbhavik modiNo ratings yet
- Xerox 5915 Service ManualDocument146 pagesXerox 5915 Service Manualmehdi_palangiNo ratings yet
- Advantages and Disadvantages of A SERIES and PARALLEL CircuitDocument5 pagesAdvantages and Disadvantages of A SERIES and PARALLEL CircuitCHRISTIAN NATHANIEL PALMANo ratings yet
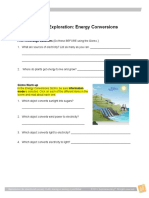
- Student Exploration: Energy Conversions: Prior Knowledge Questions (Do These BEFORE Using The GizmoDocument2 pagesStudent Exploration: Energy Conversions: Prior Knowledge Questions (Do These BEFORE Using The GizmoJose 123No ratings yet
- Impacts of Land Use:land Cover Changes On Surface Urban Heat Islands - A Case Study of Coimbatore, IndiaDocument17 pagesImpacts of Land Use:land Cover Changes On Surface Urban Heat Islands - A Case Study of Coimbatore, IndiaRyanNo ratings yet
- Lecture 36 - Rev (Numericals)Document18 pagesLecture 36 - Rev (Numericals)yashlm1017No ratings yet
- ASTEN JOHNSON - CentraFlowDocument5 pagesASTEN JOHNSON - CentraFlowKristina ivanovicNo ratings yet
- Calotest BrochureDocument14 pagesCalotest BrochureELROHIR CULNAMONo ratings yet
- De150101 BCMDocument7 pagesDe150101 BCMseve1No ratings yet
- Mathematics: Quarter 2 - Module 3 Rational Algebraic ExpressionsDocument28 pagesMathematics: Quarter 2 - Module 3 Rational Algebraic ExpressionsManelyn Taga0% (1)
- BS Iso TR 08363-1997 (1999)Document16 pagesBS Iso TR 08363-1997 (1999)Олег СоловьевNo ratings yet
- Obtaining Hydrostatic or Pressure Design Basis For "Fiberglass" (Glass-Fiber-Reinforced Thermosetting-Resin) Pipe and FittingsDocument10 pagesObtaining Hydrostatic or Pressure Design Basis For "Fiberglass" (Glass-Fiber-Reinforced Thermosetting-Resin) Pipe and FittingsShaker QaidiNo ratings yet
- University of Santo TomasDocument5 pagesUniversity of Santo TomasChester GertesNo ratings yet
- Worksheet X AprilDocument3 pagesWorksheet X AprilAyushiNo ratings yet
- Bangabandhu Sheikh Mujibur Rahman Science and TechnologyDocument12 pagesBangabandhu Sheikh Mujibur Rahman Science and TechnologyMuhammad Rashedul IslamNo ratings yet
- Aisi 4140 (0.40% C)Document5 pagesAisi 4140 (0.40% C)BernardoNo ratings yet
- LectureNotes Part1 (21-22) ReducedDocument218 pagesLectureNotes Part1 (21-22) ReducedJasonNo ratings yet
- Definition, Terms & Laws Physics F4F5: Form 4Document9 pagesDefinition, Terms & Laws Physics F4F5: Form 4NatashaNo ratings yet
- IsotopesworksheetDocument2 pagesIsotopesworksheetapi-233187566No ratings yet
- Curriculum - Computer Science - v2021.89Document1 pageCurriculum - Computer Science - v2021.8927.Nguyễn Trung Nguyên 12a17No ratings yet
- Synchronous Belt-Double-Sided Synchronous BeltDocument7 pagesSynchronous Belt-Double-Sided Synchronous BeltvietkhamNo ratings yet
- NEWKer 18imi Series Controller Installation GuideDocument12 pagesNEWKer 18imi Series Controller Installation GuideElenilton MelchiorsNo ratings yet
- Multimodal Response Spectrum Method Analysis of Integral Abutment Curved Box Girder BridgeDocument4 pagesMultimodal Response Spectrum Method Analysis of Integral Abutment Curved Box Girder BridgeSudip ShresthaNo ratings yet
- Asme B16.38-2012 (2017) - 2Document20 pagesAsme B16.38-2012 (2017) - 2Emi Ruiz0% (1)
























































































Download as pdf or txt
You might also like
- I Visited Ganymede - Yosip IbrahimDocument70 pagesI Visited Ganymede - Yosip IbrahimhumanresonanceNo ratings yet
- Aution Eleven АЕ-4020 SM PDFDocument272 pagesAution Eleven АЕ-4020 SM PDFНиколайКрыловNo ratings yet
- 11th GateDocument48 pages11th GateSamejiel Aseviel LajesielNo ratings yet
- Mathematical Modeling of Earth's Dynamical Systems: A PrimerFrom EverandMathematical Modeling of Earth's Dynamical Systems: A PrimerRating: 3 out of 5 stars3/5 (1)
- Linear Control System Lab: Utilizing Simulink To Implement The Mathematical Model of Translational Mechanical SystemDocument8 pagesLinear Control System Lab: Utilizing Simulink To Implement The Mathematical Model of Translational Mechanical SystemMuhammad Saad AbdullahNo ratings yet
- Seismic Data Interpretation Using The Hough Transform and Principal Component AnalysisDocument14 pagesSeismic Data Interpretation Using The Hough Transform and Principal Component AnalysisDaniel OrdazNo ratings yet
- Whole-Mantle Radially Anisotropic Shear Velocity Structure From Spectral-Element Waveform TomographyDocument25 pagesWhole-Mantle Radially Anisotropic Shear Velocity Structure From Spectral-Element Waveform Tomographydj zaman nowNo ratings yet
- Hasterok Et Al 2022 New Maps of Global Geological Provinces and Tectonic PlatesDocument35 pagesHasterok Et Al 2022 New Maps of Global Geological Provinces and Tectonic PlateskarineNo ratings yet
- 2013 - A J Schaeffer - Globalshearspeedstructureoftheuppermantleandtransi (Retrieved 2018-03-27)Document33 pages2013 - A J Schaeffer - Globalshearspeedstructureoftheuppermantleandtransi (Retrieved 2018-03-27)lulu birdNo ratings yet
- GGZ 204Document16 pagesGGZ 204deepak kumarNo ratings yet
- Applied Geochemistry: Renguang Zuo, Qinglin Xia, Haicheng WangDocument10 pagesApplied Geochemistry: Renguang Zuo, Qinglin Xia, Haicheng WangVICTOR ANDRE SALINAS HERRERANo ratings yet
- Deep Learning For Seismic Lithology PredictionDocument20 pagesDeep Learning For Seismic Lithology Predictionth26wczxfipm0ql01wNo ratings yet
- Seismic MigrationDocument77 pagesSeismic Migrationnaivedya_mishra100% (2)
- Originally Published As:: Geophysical Journal International, 212, 3, Pp. 1645-1656Document13 pagesOriginally Published As:: Geophysical Journal International, 212, 3, Pp. 1645-1656Adam Sukma PutraNo ratings yet
- 1 s2.0 S0012821X15005300 MainDocument11 pages1 s2.0 S0012821X15005300 MainJorge D. MarquesNo ratings yet
- Carollo 2020Document21 pagesCarollo 2020mafer11 Reyes OnceNo ratings yet
- Fault Interpretation in Seismic Reflection Data An PDFDocument12 pagesFault Interpretation in Seismic Reflection Data An PDFHhhh JjjjNo ratings yet
- The Application of Outcrop Analogues in Geological Modelling A Review Present Status and FutureDocument25 pagesThe Application of Outcrop Analogues in Geological Modelling A Review Present Status and FutureAbdul Bari QanitNo ratings yet
- A SPICE Blind Test To Benchmark Global Tomographic Methods: November 2006Document20 pagesA SPICE Blind Test To Benchmark Global Tomographic Methods: November 2006Eddie Rio CokerNo ratings yet
- Deep Learning For Characterizing Paleokarst Collapse Features in 3-D Seismic ImagesDocument23 pagesDeep Learning For Characterizing Paleokarst Collapse Features in 3-D Seismic ImagesMaxwell SmartNo ratings yet
- Integrated Velocity Field From Ground and Satellite Geodetic Techniques-Application To Arenal VolcanoDocument18 pagesIntegrated Velocity Field From Ground and Satellite Geodetic Techniques-Application To Arenal VolcanoJorgeNo ratings yet
- Accounting For Prediction Uncertainty When Inferring Subsurface Fault SlipDocument19 pagesAccounting For Prediction Uncertainty When Inferring Subsurface Fault SlipFernando NiñoNo ratings yet
- A Successive Three Point Perturbation Method For Fast Ray Tracing in Complex 2D and 3D Geological Models - 2014 - TectonophysicsDocument10 pagesA Successive Three Point Perturbation Method For Fast Ray Tracing in Complex 2D and 3D Geological Models - 2014 - TectonophysicsMohamed AtawaNo ratings yet
- Probabilistic Seismic Source Inversion From Regional Landslide EvidenceDocument13 pagesProbabilistic Seismic Source Inversion From Regional Landslide EvidenceBrettNo ratings yet
- Volcanic and Seismic Source Modeling An Open ToolDocument18 pagesVolcanic and Seismic Source Modeling An Open ToolNiniane zhangNo ratings yet
- 1 6 EtsreDocument10 pages1 6 EtsreFrancolt41No ratings yet
- Artigo - Cnudde (2011) - 3D Characterization of Sandstone by Means of X-Ray Computed TomographyDocument9 pagesArtigo - Cnudde (2011) - 3D Characterization of Sandstone by Means of X-Ray Computed TomographyAdilson GonçalvesNo ratings yet
- ARMA 2018-15 University of BaghdadDocument10 pagesARMA 2018-15 University of BaghdadFarqad AliNo ratings yet
- Augarde Et Al 2021 - J - Numerical Modelling of Large Deformation Problems in Geotechnical Engineering - A State-Of-The-Art ReviewDocument18 pagesAugarde Et Al 2021 - J - Numerical Modelling of Large Deformation Problems in Geotechnical Engineering - A State-Of-The-Art Reviewsriram narendranNo ratings yet
- Feart 10 1058386Document14 pagesFeart 10 1058386Eduardo MonsalvezNo ratings yet
- Cross Gradien JSIDocument12 pagesCross Gradien JSIPAUL RODRIGUEZNo ratings yet
- Małkowski - Article - A Statistical Analysis of GeomechaDocument12 pagesMałkowski - Article - A Statistical Analysis of GeomechaAriNo ratings yet
- Cao 2017Document27 pagesCao 2017Kevin RiosNo ratings yet
- Muller Etal 2015Document18 pagesMuller Etal 2015Proyectos ECMNo ratings yet
- 1 s2.0 S0169555X21002117 MainDocument16 pages1 s2.0 S0169555X21002117 Mainsiska ameliaNo ratings yet
- 1-s2.0-S0169555X12005594-main UAVDocument16 pages1-s2.0-S0169555X12005594-main UAVBilly ZarateNo ratings yet
- Geo 2021 0551.1Document14 pagesGeo 2021 0551.1deepak kumarNo ratings yet
- Bourges Et Al, 2012Document13 pagesBourges Et Al, 2012Maria Fernanda Landa ElizaldeNo ratings yet
- 2019JGR WangJN WuGX CXFDocument17 pages2019JGR WangJN WuGX CXFVanessa BiondoNo ratings yet
- d71c PaperDocument9 pagesd71c PaperIvan ReneNo ratings yet
- Cori Glia No 2012Document23 pagesCori Glia No 2012Saroj Kumar SahuNo ratings yet
- Engineering Geology: Young-Kwang Yeon, Jong-Gyu Han, Keun Ho RyuDocument10 pagesEngineering Geology: Young-Kwang Yeon, Jong-Gyu Han, Keun Ho RyuOyunbiligt BaatarNo ratings yet
- 10.1007/s12665 013 2653 ZDocument14 pages10.1007/s12665 013 2653 ZAnre Thanh HungNo ratings yet
- Combining Geologic Process Models and Geostatistics For Conditional Simulation of 3 D Subsurface HeterogeneityDocument20 pagesCombining Geologic Process Models and Geostatistics For Conditional Simulation of 3 D Subsurface HeterogeneityngueleNo ratings yet
- Wobus Et Al, 2006Document21 pagesWobus Et Al, 2006mauricio espinozaNo ratings yet
- A Novel Approach To Probabilistic Seismic Landslide Hazard Mapping UsingDocument12 pagesA Novel Approach To Probabilistic Seismic Landslide Hazard Mapping UsingAojie FengNo ratings yet
- Reverse Time Migration From Irregular Surface by Flattening Surface Topography - 2014 - TectonophysicsDocument12 pagesReverse Time Migration From Irregular Surface by Flattening Surface Topography - 2014 - TectonophysicsMohamed AtawaNo ratings yet
- Journal of Geophysical Research Earth Surface - 2010 - Passalacqua - A Geometric Framework For Channel Network ExtractionDocument18 pagesJournal of Geophysical Research Earth Surface - 2010 - Passalacqua - A Geometric Framework For Channel Network ExtractionKiran SriramNo ratings yet
- Particle size effects on small-scale avalanches and a μ (I) rheology-based simulationDocument12 pagesParticle size effects on small-scale avalanches and a μ (I) rheology-based simulation丫丫衣衣No ratings yet
- Xu 2010Document10 pagesXu 2010VICTOR MANUEL URIBE CORDOVANo ratings yet
- 1 s2.0 S0169555X23002581 MainDocument8 pages1 s2.0 S0169555X23002581 MainJorge D. MarquesNo ratings yet
- Automatic Extraction of Discontinuity Orientation From Rock MassDocument14 pagesAutomatic Extraction of Discontinuity Orientation From Rock MassoscarNo ratings yet
- Artigo 11 Comparative Study On Calculation Methods of Blasting Vibration VelocityRock Mechanics and Rock EngineeringDocument9 pagesArtigo 11 Comparative Study On Calculation Methods of Blasting Vibration VelocityRock Mechanics and Rock EngineeringCléverson TrindadeNo ratings yet
- Engineering Geology: Yu Wang, Siu-Kui Au, Zijun CaoDocument10 pagesEngineering Geology: Yu Wang, Siu-Kui Au, Zijun CaoSilvanaMontoyaNogueraNo ratings yet
- 1 s2.0 S0266352X20302202 MainDocument9 pages1 s2.0 S0266352X20302202 Mainnhan nguyenNo ratings yet
- Computers & Geosciences: Bryan S.A. Tatone, Giovanni GrasselliDocument17 pagesComputers & Geosciences: Bryan S.A. Tatone, Giovanni Grasselliroshansm1978No ratings yet
- Computers & Geosciences: Bryan S.A. Tatone, Giovanni GrasselliDocument17 pagesComputers & Geosciences: Bryan S.A. Tatone, Giovanni GrasselliMarcos MaNo ratings yet
- Bayesian Rpi Mat GeoDocument56 pagesBayesian Rpi Mat GeoNonato Colares ColaresNo ratings yet
- Session Report - Geophysics 1Document8 pagesSession Report - Geophysics 1NugNo ratings yet
- KernelDocument11 pagesKernelSajid MehmoodNo ratings yet
- 2022 Cross-Correlation Stacking-Based Microseismic Source Location Using Three Metaheuristic Optimization AlgorithmsDocument15 pages2022 Cross-Correlation Stacking-Based Microseismic Source Location Using Three Metaheuristic Optimization Algorithms周牮No ratings yet
- Variational Bayesian Experimental Design For Geophysical Applications Seismic Source Location, Amplitude Versus Offset Inversion, and Estimating CO2 Saturations in A Subsurface ReservoirDocument23 pagesVariational Bayesian Experimental Design For Geophysical Applications Seismic Source Location, Amplitude Versus Offset Inversion, and Estimating CO2 Saturations in A Subsurface Reservoirricit48236No ratings yet
- A Geometric Framework For Channel Network ExtractiDocument19 pagesA Geometric Framework For Channel Network ExtractiArthur KayNo ratings yet
- REM Geo&Man Comp 2016Document350 pagesREM Geo&Man Comp 2016youungNo ratings yet
- Grundfos CR 15 2 A F A e HqqeDocument11 pagesGrundfos CR 15 2 A F A e HqqeFKIANo ratings yet
- King Solomons College S4 Physics SeminarDocument11 pagesKing Solomons College S4 Physics SeminarDaniel MarkNo ratings yet
- Pile CapDocument44 pagesPile Capbhavik modiNo ratings yet
- Xerox 5915 Service ManualDocument146 pagesXerox 5915 Service Manualmehdi_palangiNo ratings yet
- Advantages and Disadvantages of A SERIES and PARALLEL CircuitDocument5 pagesAdvantages and Disadvantages of A SERIES and PARALLEL CircuitCHRISTIAN NATHANIEL PALMANo ratings yet
- Student Exploration: Energy Conversions: Prior Knowledge Questions (Do These BEFORE Using The GizmoDocument2 pagesStudent Exploration: Energy Conversions: Prior Knowledge Questions (Do These BEFORE Using The GizmoJose 123No ratings yet
- Impacts of Land Use:land Cover Changes On Surface Urban Heat Islands - A Case Study of Coimbatore, IndiaDocument17 pagesImpacts of Land Use:land Cover Changes On Surface Urban Heat Islands - A Case Study of Coimbatore, IndiaRyanNo ratings yet
- Lecture 36 - Rev (Numericals)Document18 pagesLecture 36 - Rev (Numericals)yashlm1017No ratings yet
- ASTEN JOHNSON - CentraFlowDocument5 pagesASTEN JOHNSON - CentraFlowKristina ivanovicNo ratings yet
- Calotest BrochureDocument14 pagesCalotest BrochureELROHIR CULNAMONo ratings yet
- De150101 BCMDocument7 pagesDe150101 BCMseve1No ratings yet
- Mathematics: Quarter 2 - Module 3 Rational Algebraic ExpressionsDocument28 pagesMathematics: Quarter 2 - Module 3 Rational Algebraic ExpressionsManelyn Taga0% (1)
- BS Iso TR 08363-1997 (1999)Document16 pagesBS Iso TR 08363-1997 (1999)Олег СоловьевNo ratings yet
- Obtaining Hydrostatic or Pressure Design Basis For "Fiberglass" (Glass-Fiber-Reinforced Thermosetting-Resin) Pipe and FittingsDocument10 pagesObtaining Hydrostatic or Pressure Design Basis For "Fiberglass" (Glass-Fiber-Reinforced Thermosetting-Resin) Pipe and FittingsShaker QaidiNo ratings yet
- University of Santo TomasDocument5 pagesUniversity of Santo TomasChester GertesNo ratings yet
- Worksheet X AprilDocument3 pagesWorksheet X AprilAyushiNo ratings yet
- Bangabandhu Sheikh Mujibur Rahman Science and TechnologyDocument12 pagesBangabandhu Sheikh Mujibur Rahman Science and TechnologyMuhammad Rashedul IslamNo ratings yet
- Aisi 4140 (0.40% C)Document5 pagesAisi 4140 (0.40% C)BernardoNo ratings yet
- LectureNotes Part1 (21-22) ReducedDocument218 pagesLectureNotes Part1 (21-22) ReducedJasonNo ratings yet
- Definition, Terms & Laws Physics F4F5: Form 4Document9 pagesDefinition, Terms & Laws Physics F4F5: Form 4NatashaNo ratings yet
- IsotopesworksheetDocument2 pagesIsotopesworksheetapi-233187566No ratings yet
- Curriculum - Computer Science - v2021.89Document1 pageCurriculum - Computer Science - v2021.8927.Nguyễn Trung Nguyên 12a17No ratings yet
- Synchronous Belt-Double-Sided Synchronous BeltDocument7 pagesSynchronous Belt-Double-Sided Synchronous BeltvietkhamNo ratings yet
- NEWKer 18imi Series Controller Installation GuideDocument12 pagesNEWKer 18imi Series Controller Installation GuideElenilton MelchiorsNo ratings yet
- Multimodal Response Spectrum Method Analysis of Integral Abutment Curved Box Girder BridgeDocument4 pagesMultimodal Response Spectrum Method Analysis of Integral Abutment Curved Box Girder BridgeSudip ShresthaNo ratings yet
- Asme B16.38-2012 (2017) - 2Document20 pagesAsme B16.38-2012 (2017) - 2Emi Ruiz0% (1)