Download as pdf or txt
You might also like
- Sankey Diagrams WorksheetDocument4 pagesSankey Diagrams WorksheetDora Aye100% (1)
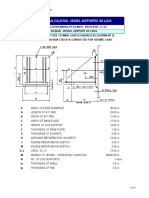
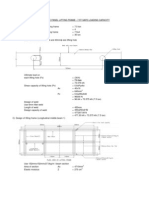
- Lug Support DesignDocument11 pagesLug Support Designimrancenakk100% (6)
- Solution of The Differential Equation of Simple Harmonic MotionDocument6 pagesSolution of The Differential Equation of Simple Harmonic MotionAriyan Abrar SaifNo ratings yet
- ECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPDocument8 pagesECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPNunjaNo ratings yet
- Circuit Simulation of A BLDC MotorDocument4 pagesCircuit Simulation of A BLDC Motorjpmacabasco100% (1)
- Chopper ApplicationDocument10 pagesChopper ApplicationAishwarya VermaNo ratings yet
- MoappDocument5 pagesMoappluanleNo ratings yet
- Experimental and Simulation StudyDocument10 pagesExperimental and Simulation Studyمحمد عامرNo ratings yet
- Exp5 WORDDocument6 pagesExp5 WORDMajdy gamingNo ratings yet
- DTrends Feb 2011Document14 pagesDTrends Feb 2011Rui AllenNo ratings yet
- ECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesDocument7 pagesECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesHüseyin Murat PolaterNo ratings yet
- BLDC Under Load PDFDocument9 pagesBLDC Under Load PDFAhmed ShoeebNo ratings yet
- Assignment Continuous SysDocument13 pagesAssignment Continuous SysMohamed Elsayed HarbNo ratings yet
- Electric MachineDocument24 pagesElectric Machinemakram.22en498No ratings yet
- ProjectControl, DC. AnalysisDocument15 pagesProjectControl, DC. AnalysisFir Dauss100% (1)
- User's Manual: D.C. Motor StudyDocument25 pagesUser's Manual: D.C. Motor Studymanoj_varma_1No ratings yet
- Ijresm V2 I2 192Document3 pagesIjresm V2 I2 192Nguyễn Hải ĐăngNo ratings yet
- Mechatronics Ii Laboratory Experiment #2: DC Motor Torque-Speed CurveDocument4 pagesMechatronics Ii Laboratory Experiment #2: DC Motor Torque-Speed CurveMhmdÁbdóNo ratings yet
- Drive Fundamentals and DC Motor CharacteristicsDocument3 pagesDrive Fundamentals and DC Motor CharacteristicsJoeNo ratings yet
- Eddy Current MotorDocument3 pagesEddy Current Motorbijlwanr50% (2)
- ECEN 441-504: Electronic Motor Drive: Lab 3: Operating Characteristics of The Separately Excited DC MotorDocument6 pagesECEN 441-504: Electronic Motor Drive: Lab 3: Operating Characteristics of The Separately Excited DC Motorapi-241454978No ratings yet
- Web Motor GlossaryDocument7 pagesWeb Motor GlossaryansabhiNo ratings yet
- Electric Vehicle Modelling and SimulationDocument25 pagesElectric Vehicle Modelling and SimulationLakshmanan subas chandra bose100% (1)
- Ac 2011-1439: Fuzzy Logic-Based PMDC Motor Controller - An Undergraduate Student ProjectDocument13 pagesAc 2011-1439: Fuzzy Logic-Based PMDC Motor Controller - An Undergraduate Student ProjectFlorin CiudinNo ratings yet
- DC Motor Parameter Identification Using Speed Step ResponsesDocument6 pagesDC Motor Parameter Identification Using Speed Step ResponsesHasson SniperNo ratings yet
- Lab 2 - Electric Motor: Part 1 - How Does A DC Motor Work?Document8 pagesLab 2 - Electric Motor: Part 1 - How Does A DC Motor Work?Fuad SuleymanNo ratings yet
- EE 392: Control Systems & Their Components: Lab 2: DC Motor Speed: Frequency Domain Methods For Controller DesignDocument4 pagesEE 392: Control Systems & Their Components: Lab 2: DC Motor Speed: Frequency Domain Methods For Controller DesignAbdalla FathyNo ratings yet
- Modelling and Simulation LabDocument55 pagesModelling and Simulation LabNobita NobiNo ratings yet
- D4E - Simulink Tutorial 1 2019Document2 pagesD4E - Simulink Tutorial 1 2019Ishmaiah Integral MwalwandaNo ratings yet
- CS7Document8 pagesCS7zubairashrafNo ratings yet
- 3 EMD Test 2 Sem1 - 21 - 22Document6 pages3 EMD Test 2 Sem1 - 21 - 22nelissa nazriNo ratings yet
- Objective: Fig 1. Left Hand RuleDocument11 pagesObjective: Fig 1. Left Hand RuleShahir Afif IslamNo ratings yet
- نجيبDocument10 pagesنجيبMalik ZaidNo ratings yet
- Modelling File Edited AnuragDocument53 pagesModelling File Edited AnuragHARENDRA BHINCHARNo ratings yet
- Techteach - No Simview DC Motor IndexDocument3 pagesTechteach - No Simview DC Motor IndexDiabloNo ratings yet
- Block Diagram of Electromechanical SystemDocument20 pagesBlock Diagram of Electromechanical SystemSandeep ReddyNo ratings yet
- Speed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiDocument11 pagesSpeed Control of Separately Excited D.C. Motor: Chayan Kumar, Prof. (DR.) Deoraj Kumar TantiWieNo ratings yet
- Transient Response of A Separately Excited DC Motor Under No-Load ConditionDocument6 pagesTransient Response of A Separately Excited DC Motor Under No-Load ConditionSaad0806No ratings yet
- 1) Introduction: Laboratory Exercise 3: Lumped Parameter Characterization of A Permanent Magnet DC MotorDocument5 pages1) Introduction: Laboratory Exercise 3: Lumped Parameter Characterization of A Permanent Magnet DC MotorRajalakshmi TVNo ratings yet
- (1989) IEEE-Estimate of Indicated Torque From Crankshaft Speed Fluctuations A Model For The Dynamics of The IC EngineDocument12 pages(1989) IEEE-Estimate of Indicated Torque From Crankshaft Speed Fluctuations A Model For The Dynamics of The IC EngineAnonymous rHQNMoNo ratings yet
- Practical Motor Starting E161 PDFDocument0 pagesPractical Motor Starting E161 PDFmicrefeeNo ratings yet
- DC Motor Simulation Using LTSpiceDocument7 pagesDC Motor Simulation Using LTSpiceMizael AlvesNo ratings yet
- PE Lecture No.08 PDFDocument15 pagesPE Lecture No.08 PDFmonish halder100% (2)
- Simulation of D.C. Machines Transient Behaviors: Teaching and ResearchDocument7 pagesSimulation of D.C. Machines Transient Behaviors: Teaching and ResearchJames SilvaNo ratings yet
- DC Motor Controlling and Simulation Through 3-Phasethyristor Based-InverterDocument4 pagesDC Motor Controlling and Simulation Through 3-Phasethyristor Based-InverterRavindra MauryaNo ratings yet
- Laboratory Report Electronic MotorsDocument11 pagesLaboratory Report Electronic MotorsChloe JonesNo ratings yet
- SMMA Motor GlossaryDocument11 pagesSMMA Motor GlossaryNurulHardyNo ratings yet
- 3.chapter Three-Starting System 1Document21 pages3.chapter Three-Starting System 1Ahmed M MerzaNo ratings yet
- Current PulsationDocument12 pagesCurrent Pulsationtopazamp123No ratings yet
- ED Lab Manual Original - Exp 1 To Exp 5Document19 pagesED Lab Manual Original - Exp 1 To Exp 5Umang MewaraNo ratings yet
- Advanced in Control Engineeringand Information ScienceDocument5 pagesAdvanced in Control Engineeringand Information ScienceLuemba DayzesNo ratings yet
- Modelling and Simulation of Synchronous Machine Transient AnalysisDocument10 pagesModelling and Simulation of Synchronous Machine Transient AnalysisManikandan DurairajNo ratings yet
- Handbook and Application Guide For High-Performance Brushless Servo SystemsDocument26 pagesHandbook and Application Guide For High-Performance Brushless Servo SystemsAnonymous bjXxKrQa6bNo ratings yet
- Working Principles Need of Dynamic Modeling and Accurate Control of Motor Drives Dynamic Modeling of DC Machine Control of DC MachineDocument23 pagesWorking Principles Need of Dynamic Modeling and Accurate Control of Motor Drives Dynamic Modeling of DC Machine Control of DC MachineAli ZahidNo ratings yet
- Influence of Essential Dimensions of Rotor Ge-Ometry On Reluctance Torque GenerationDocument5 pagesInfluence of Essential Dimensions of Rotor Ge-Ometry On Reluctance Torque GenerationBOUZ2010No ratings yet
- Ebrahim I 2000Document13 pagesEbrahim I 2000namNo ratings yet
- DC Motor CalculationsDocument10 pagesDC Motor Calculationsoctav12No ratings yet
- Torque-Slip Characteristics and Its ExplanationDocument17 pagesTorque-Slip Characteristics and Its Explanationvoltax1No ratings yet
- 5.CS Lab Manual R14Document80 pages5.CS Lab Manual R14Kh KhalilNo ratings yet
- Exp5 SheetDocument6 pagesExp5 SheetMajdy gamingNo ratings yet
- Mathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkDocument6 pagesMathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkSharath KumarNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Chapter 6 - Moment Distribution: Dr. C. CapraniDocument177 pagesChapter 6 - Moment Distribution: Dr. C. Capranihitendra_gk100% (2)
- Chapter #3Document24 pagesChapter #3kKhalid YousafNo ratings yet
- Marking Scheme Physics P1P2P3 SPM Kelantan 2009Document9 pagesMarking Scheme Physics P1P2P3 SPM Kelantan 2009Mohd Khairul AnuarNo ratings yet
- Dom Qbank IIIDocument5 pagesDom Qbank IIISabareeswaran MurugesanNo ratings yet
- Mechanical Privious Year Gate Papers Gate - 2000Document12 pagesMechanical Privious Year Gate Papers Gate - 2000Riddhi100% (1)
- Cohesion Intercept of Soils + Typical Values PDFDocument5 pagesCohesion Intercept of Soils + Typical Values PDFyajive9970No ratings yet
- Egg Drop LabDocument5 pagesEgg Drop LabRobinhood Jevons MartirezNo ratings yet
- Early Age Properties of Self-Compacting Concrete - Effects of Fine Aggregate and Limestone Filler - ThesisDocument206 pagesEarly Age Properties of Self-Compacting Concrete - Effects of Fine Aggregate and Limestone Filler - ThesisyoussefNo ratings yet
- Lec 1 Design of RC Structures For Lateral LoadsDocument49 pagesLec 1 Design of RC Structures For Lateral Loadsamin alzuraiki100% (1)
- Jntuh Ettl Model Papers and Important QuestionsDocument7 pagesJntuh Ettl Model Papers and Important QuestionsKishore Kumar100% (1)
- Crack Detection in Brake Disc by Modal AnalysisDocument19 pagesCrack Detection in Brake Disc by Modal Analysispravi2010No ratings yet
- Analysis User - S Manual Vol4 - AbaqusDocument1,100 pagesAnalysis User - S Manual Vol4 - AbaqusLucas VieiraNo ratings yet
- Lifting FrameDocument8 pagesLifting FrameSaravanan SKNo ratings yet
- Xample: Internal Incompressible Viscous FlowDocument2 pagesXample: Internal Incompressible Viscous Flowวีรินทร์ ขนิษดาNo ratings yet
- 2 Lec-2Document26 pages2 Lec-2Shakeeb KhanNo ratings yet
- Cherenkov 2Document7 pagesCherenkov 2Christina Ria ErnawatiNo ratings yet
- Flumech Fluid Mechanics All ChaptersDocument220 pagesFlumech Fluid Mechanics All ChaptersMLNDG boysNo ratings yet
- MIDAS 2013 Indonesia Workshop - Cable Stayed BridgeDocument85 pagesMIDAS 2013 Indonesia Workshop - Cable Stayed BridgeDanang Rahadian100% (1)
- Crack Opening DisplacementDocument2 pagesCrack Opening Displacementsqaiba_gNo ratings yet
- D1 Drone Bootcamp DocumentationDocument10 pagesD1 Drone Bootcamp DocumentationUtkarsh AdityaNo ratings yet
- Asphalt Institutes Guidance Document On Using MSCR With AASHTO M320Document3 pagesAsphalt Institutes Guidance Document On Using MSCR With AASHTO M320TK ThachNo ratings yet
- Exercise 2Document2 pagesExercise 2Nikhil RanjanNo ratings yet
- 02 Fundamental of Fluid Flow Part 2Document18 pages02 Fundamental of Fluid Flow Part 2FerdiNandoNo ratings yet
- Fundamentals of Wind Tunnel Design: December 2010Document11 pagesFundamentals of Wind Tunnel Design: December 2010jasmineNo ratings yet
- Difference Between Reciprocating Pump and Centrifugal Pump With PDFDocument4 pagesDifference Between Reciprocating Pump and Centrifugal Pump With PDFSantiago TutilloNo ratings yet
- FSI Simulation of HALE UAVDocument32 pagesFSI Simulation of HALE UAV783255No ratings yet
- Edited - Edited - NEET UG Physics Dual Nature of Matter MCQsDocument49 pagesEdited - Edited - NEET UG Physics Dual Nature of Matter MCQsEswar AnandNo ratings yet