Download as pdf or txt
You might also like
- IT Project ManagmentDocument9 pagesIT Project ManagmentNehal Gupta100% (1)
- Tim 2020 3033726Document12 pagesTim 2020 3033726redstitch15No ratings yet
- Deep Learning Based Solder Joint Defect Detection On Industrial Printed Circuit Board X-Ray ImagesDocument13 pagesDeep Learning Based Solder Joint Defect Detection On Industrial Printed Circuit Board X-Ray ImagesSorescu Simona-LuminițaNo ratings yet
- A CNN-Based Transfer Learning Method For Defect Classification in Semiconductor ManufacturingDocument5 pagesA CNN-Based Transfer Learning Method For Defect Classification in Semiconductor Manufacturinghannounisalma6No ratings yet
- Convolutional Neural Networks-Based Crack Detection For Real Concrete SurfaceDocument8 pagesConvolutional Neural Networks-Based Crack Detection For Real Concrete SurfaceJake N PaliNo ratings yet
- Design and Implementation of A Deep LearningDocument11 pagesDesign and Implementation of A Deep LearningUebbNo ratings yet
- SamsfrcnnDocument5 pagesSamsfrcnnMebratu AbuyeNo ratings yet
- Automatic Localization of Casting Defects With Convolutional Neural NetworksDocument11 pagesAutomatic Localization of Casting Defects With Convolutional Neural NetworksFalak KoliNo ratings yet
- Image Segmentationand Semantic Labelingusing Machine LearningDocument6 pagesImage Segmentationand Semantic Labelingusing Machine LearningZAHRA FASKANo ratings yet
- Younis 2020Document5 pagesYounis 2020nalakathshamil8No ratings yet
- Fisuras en La Construcción 1Document14 pagesFisuras en La Construcción 1Edgar Enrique Vilca RomeroNo ratings yet
- Welding Defect Classification Based On Convolution Neural Network (CNN) and Gaussian KernelDocument5 pagesWelding Defect Classification Based On Convolution Neural Network (CNN) and Gaussian KernelĐào Văn HưngNo ratings yet
- Review - 3Document36 pagesReview - 3NithishNo ratings yet
- Applsci 10 01878Document16 pagesApplsci 10 01878oelassal444No ratings yet
- A Face Recognition System On Embedded DeviceDocument8 pagesA Face Recognition System On Embedded DeviceChiranjib PatraNo ratings yet
- 18ei7deran-Cie2 Answer KeyDocument4 pages18ei7deran-Cie2 Answer KeyKrushnasamy SuramaniyanNo ratings yet
- The Implementation of Automated Optical Inspection in Printed Circuit BoardsDocument10 pagesThe Implementation of Automated Optical Inspection in Printed Circuit Boardssudar1477No ratings yet
- ADeep Convolutional Neural Networkfor WaferDocument10 pagesADeep Convolutional Neural Networkfor WaferrumanaNo ratings yet
- A Neural-Network Approach For Semiconductor Wafer Post-Sawing InspectionDocument7 pagesA Neural-Network Approach For Semiconductor Wafer Post-Sawing InspectionMohd Nurfirdaus Mohd ShamsuriNo ratings yet
- A Deep Learning Approach For Face Detection and LoDocument7 pagesA Deep Learning Approach For Face Detection and LoTemitayo Olutimi EjidokunNo ratings yet
- Large-Scale Image-To-Video Face Retrieval With Convolutional Neural Network FeaturesDocument6 pagesLarge-Scale Image-To-Video Face Retrieval With Convolutional Neural Network FeaturesIAES IJAINo ratings yet
- Revista de SensoresDocument13 pagesRevista de SensoresIts JhoreyNo ratings yet
- An Ef Cient Regression Method For 3D Object Localization in Machine Vision SystemsDocument11 pagesAn Ef Cient Regression Method For 3D Object Localization in Machine Vision SystemsIAES International Journal of Robotics and AutomationNo ratings yet
- Application of The OpenCV-Python For Personal Identifier StatementDocument4 pagesApplication of The OpenCV-Python For Personal Identifier StatementMuzammil NaeemNo ratings yet
- Zone Theory Applied To Boost Recognition Rate of HMM Based SystemDocument7 pagesZone Theory Applied To Boost Recognition Rate of HMM Based SystemInternational Association of Scientific Innovations and Research (IASIR)No ratings yet
- Weld Defect Extraction and ClassificationDocument8 pagesWeld Defect Extraction and ClassificationzsmithNo ratings yet
- Face Recognition Based On Convolutional Neural Network.: November 2017Document5 pagesFace Recognition Based On Convolutional Neural Network.: November 2017MackNo ratings yet
- Diagonal Based Feature Extraction For Handwritten Alphabets Recognition System Using Neural NetworkDocument12 pagesDiagonal Based Feature Extraction For Handwritten Alphabets Recognition System Using Neural NetworkAnonymous Gl4IRRjzNNo ratings yet
- Vanity Plate IdentificationDocument7 pagesVanity Plate Identificationswathi8903422971No ratings yet
- B16 Paper IEEEDocument6 pagesB16 Paper IEEEAman PrasadNo ratings yet
- Handwritten Letter Recognition Using Artificial Intelligence'Document9 pagesHandwritten Letter Recognition Using Artificial Intelligence'IJRASETPublicationsNo ratings yet
- Pattern RecognitionDocument11 pagesPattern RecognitionAlaukikNo ratings yet
- B.E Cse Batchno 104Document47 pagesB.E Cse Batchno 104maniuyyala65No ratings yet
- Crack FetectionDocument12 pagesCrack FetectionSurya Patria CraneNo ratings yet
- A New Image Recognition and Classification Method Combining Transfer Learning Algorithm and MobileNet Model For Welding DefectsDocument10 pagesA New Image Recognition and Classification Method Combining Transfer Learning Algorithm and MobileNet Model For Welding DefectsThomas LiNo ratings yet
- An Online Surface Defects Detection System For AWAM Based On Deep LearningDocument17 pagesAn Online Surface Defects Detection System For AWAM Based On Deep LearningLinku sahooNo ratings yet
- Literature Survey On Fingerprint Recognition Using Level 3 Feature Extraction MethodDocument8 pagesLiterature Survey On Fingerprint Recognition Using Level 3 Feature Extraction MethodBindhu HRNo ratings yet
- Sensors 19 03987 v4Document6 pagesSensors 19 03987 v4Joely SilvaNo ratings yet
- Real-Time Face Recognition Using An Optimized Neural NetworkDocument8 pagesReal-Time Face Recognition Using An Optimized Neural NetworkFerdous IrtiazNo ratings yet
- Optical Character Recognition Using Artificial Neural NetworkDocument4 pagesOptical Character Recognition Using Artificial Neural NetworkFarhad Ahmed ChirleyNo ratings yet
- End-To-End Iris Segmentation Using U-Net: Ju S Lozej, Bla Z Meden, Vitomir Struc, Peter PeerDocument6 pagesEnd-To-End Iris Segmentation Using U-Net: Ju S Lozej, Bla Z Meden, Vitomir Struc, Peter PeerJamil Al-idrusNo ratings yet
- (IJCST-V3I3P1) : Suhasini A, Sonal D Kalro, Prathiksha B G, Meghashree B S, Phaneendra H DDocument6 pages(IJCST-V3I3P1) : Suhasini A, Sonal D Kalro, Prathiksha B G, Meghashree B S, Phaneendra H DEighthSenseGroupNo ratings yet
- Face Tracking With Convolutional Neural Network Heat-Map: February 2018Document7 pagesFace Tracking With Convolutional Neural Network Heat-Map: February 2018kavi testNo ratings yet
- Led 2021Document10 pagesLed 2021nalakathshamil8No ratings yet
- Feature Extraction Using Convolution Neural Networks (CNN) and Deep LearningDocument5 pagesFeature Extraction Using Convolution Neural Networks (CNN) and Deep LearningHarshitha SNo ratings yet
- 2D Imagenes - CompressedDocument13 pages2D Imagenes - CompressedEdgar Enrique Vilca RomeroNo ratings yet
- 2021 DL+MV+IGAN+Defect DetectionDocument9 pages2021 DL+MV+IGAN+Defect DetectionMohammed ChibaneNo ratings yet
- Image and Video Face Retrieval With Query Image Using Convolutional Neural Network FeaturesDocument8 pagesImage and Video Face Retrieval With Query Image Using Convolutional Neural Network FeaturesIAES IJAINo ratings yet
- PCB Checking 3Document9 pagesPCB Checking 3Anurdha shammikaNo ratings yet
- Deep LearningDocument18 pagesDeep LearningSripriyan K 100507No ratings yet
- Automatic Classification of Mechanical Components of Engines Using Deep Learning TechniquesDocument10 pagesAutomatic Classification of Mechanical Components of Engines Using Deep Learning TechniquesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Research Article: Concrete Cracks Detection Using Convolutional Neural Network Based On Transfer LearningDocument10 pagesResearch Article: Concrete Cracks Detection Using Convolutional Neural Network Based On Transfer LearningVihangaNo ratings yet
- Sensors: Face Mask Wearing Detection Algorithm Based On Improved YOLO-v4Document21 pagesSensors: Face Mask Wearing Detection Algorithm Based On Improved YOLO-v4Riya RanaNo ratings yet
- Development of A Neural Network To Recognize Standards and Features From 3D CAD Models - 1-s2.0-S2212827120305552-MainDocument6 pagesDevelopment of A Neural Network To Recognize Standards and Features From 3D CAD Models - 1-s2.0-S2212827120305552-Mainrykennelly1No ratings yet
- Concrete Crack Detection Algorithm Based On Deep Residual Neural NetworksDocument7 pagesConcrete Crack Detection Algorithm Based On Deep Residual Neural NetworksCamilo matta torresNo ratings yet
- Document 39Document7 pagesDocument 39Harsh ModiNo ratings yet
- Anchor-Based Vs Anchor-Free ObjectDocument8 pagesAnchor-Based Vs Anchor-Free Objectsobuz visualNo ratings yet
- Object Detection Smart Security System: Submitted in Partial Fulfillment of The Requirements For The Award of Degree ofDocument18 pagesObject Detection Smart Security System: Submitted in Partial Fulfillment of The Requirements For The Award of Degree ofShanu Naval SinghNo ratings yet
- Proceedings of Spie: Cycle-Enhance: Low-Light Image Enhancement Based On CycleganDocument7 pagesProceedings of Spie: Cycle-Enhance: Low-Light Image Enhancement Based On Cycleganmurshid zaman bhuiyanNo ratings yet
- Automated Cast Quality Inspection Using Deep Learning: Karthik J, Sk. Sabeer Ahmed, Meghana K & Satheesh Kumar Reddy PDocument8 pagesAutomated Cast Quality Inspection Using Deep Learning: Karthik J, Sk. Sabeer Ahmed, Meghana K & Satheesh Kumar Reddy PTJPRC PublicationsNo ratings yet
- Tools and Work Holding Devices of CNC MachinesDocument9 pagesTools and Work Holding Devices of CNC Machinessham javed100% (2)
- Complex Interview QuestionsDocument3 pagesComplex Interview QuestionsKrish Pavan86% (7)
- Data Sheet: Leica Viva TS16Document2 pagesData Sheet: Leica Viva TS16abhd benzidNo ratings yet
- IntroductionDocument3 pagesIntroductionYogie NovriandiNo ratings yet
- 4232 MGVCL 10 56 21 01Tender-NoticeDocument2 pages4232 MGVCL 10 56 21 01Tender-NoticeABCDNo ratings yet
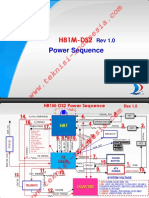
- H81M-DS2: Power SequenceDocument2 pagesH81M-DS2: Power SequenceHilario Serrano Flores100% (3)
- Nucci FrancescoDocument70 pagesNucci FrancescoNGOC PHAM THI HONGNo ratings yet
- MCC Line DiagramDocument7 pagesMCC Line DiagramTosikur RahmanNo ratings yet
- 3GPP Newcomer Introduction & Overview of 5G Status: Georg Mayer, 3GPP SA ChairmanDocument57 pages3GPP Newcomer Introduction & Overview of 5G Status: Georg Mayer, 3GPP SA ChairmanSudipta DasNo ratings yet
- PT213 Printer User ManualDocument92 pagesPT213 Printer User ManualaravindNo ratings yet
- FractionDocument126 pagesFractionMary Ann EspendeNo ratings yet
- Saint Michael College, Cantilan. Incorporated Cantilan, Surigao Del Sur Senior High School DepartmentDocument6 pagesSaint Michael College, Cantilan. Incorporated Cantilan, Surigao Del Sur Senior High School DepartmentAdi LuarezNo ratings yet
- LESSON 1: CSS in The Electronics Industry: Hey There! Welcome To The Online Course of CSS!Document6 pagesLESSON 1: CSS in The Electronics Industry: Hey There! Welcome To The Online Course of CSS!PEAC RELATEDNo ratings yet
- ZTE Common Edge White Paper enDocument29 pagesZTE Common Edge White Paper enCesar Gutierrez TineoNo ratings yet
- ENACFIRE E18 Bluetooth-Kopfhörer - BedienungsanleitungDocument10 pagesENACFIRE E18 Bluetooth-Kopfhörer - BedienungsanleitungThorstenTonkaNo ratings yet
- Year I, Semester II (2016/2017) : # Course Title Course Code CR - Hr. Ects Grade GPTDocument5 pagesYear I, Semester II (2016/2017) : # Course Title Course Code CR - Hr. Ects Grade GPTWubalemNo ratings yet
- Insurance Project ModulesDocument32 pagesInsurance Project Modulesbharathgora100% (3)
- ContactsDocument5 pagesContacts7myzrm9s4sNo ratings yet
- Duct Temperature Sensors QAM21.. - enDocument6 pagesDuct Temperature Sensors QAM21.. - enСтефан ПериндевNo ratings yet
- ChangelogDocument3 pagesChangelogGãllëtïtø Cøn Lêchë ÒwóNo ratings yet
- Interact With IT Book 1 AnswersDocument77 pagesInteract With IT Book 1 AnswerssivananbukayalvizhiNo ratings yet
- Kesha.h.m.s ProjectDocument17 pagesKesha.h.m.s Projectkevin louisNo ratings yet
- Empowerment Module 1Document7 pagesEmpowerment Module 1Rostum Raton100% (1)
- Fundumental Group of A GraphDocument1 pageFundumental Group of A GraphMatan Even TsurNo ratings yet
- MT3337 DatasheetDocument31 pagesMT3337 DatasheetjaoNo ratings yet
- English - NanoVNA - 2020 - Part 1Document54 pagesEnglish - NanoVNA - 2020 - Part 1Yovani GuirolaNo ratings yet
- Cambridge O Level: Computer Science 2210/13Document12 pagesCambridge O Level: Computer Science 2210/13Afshan Masood8ANo ratings yet
- Vce To PDF Converter: Facebook: Twitter: Google+: LinkedinDocument24 pagesVce To PDF Converter: Facebook: Twitter: Google+: LinkedinМихаилNo ratings yet
- MasterCAM BrochureDocument28 pagesMasterCAM BrochurePhúc NguyễnNo ratings yet