Download as pdf or txt
You might also like
- Burt Word Recognition TestDocument8 pagesBurt Word Recognition TestYiwen Wu100% (1)
- Special Matrices and Their Applications in Numerical Mathematics: Second EditionFrom EverandSpecial Matrices and Their Applications in Numerical Mathematics: Second EditionRating: 5 out of 5 stars5/5 (1)
- Ziglari - 2017 - Interpreting Multiple Regression Results- β Weights and Structure CoefficientsDocument10 pagesZiglari - 2017 - Interpreting Multiple Regression Results- β Weights and Structure CoefficientsFatmanur ÇifciNo ratings yet
- Statistical Practice: Estimators of Relative Importance in Linear Regression Based On Variance DecompositionDocument9 pagesStatistical Practice: Estimators of Relative Importance in Linear Regression Based On Variance DecompositionLyly MagnanNo ratings yet
- Articulo MetodosDocument7 pagesArticulo MetodosCesarRamNo ratings yet
- 1518 (Assignment 2) - Packages IiiDocument6 pages1518 (Assignment 2) - Packages IiiHira NaeemNo ratings yet
- 4869 Robust Sparse Principal Component Regression Under The High Dimensional Elliptical ModelDocument9 pages4869 Robust Sparse Principal Component Regression Under The High Dimensional Elliptical ModelVe LopiNo ratings yet
- Principle Component Analysis and Partial Least Squares: Two Dimension Reduction Techniques For RegressionDocument12 pagesPrinciple Component Analysis and Partial Least Squares: Two Dimension Reduction Techniques For RegressionCamila LimaNo ratings yet
- Principle Component Analysis and Partial Least Squares: Two Dimension Reduction Techniques For RegressionDocument12 pagesPrinciple Component Analysis and Partial Least Squares: Two Dimension Reduction Techniques For RegressionCamila LimaNo ratings yet
- Journal of Statistical Software: BCP: An R Package For Performing A Bayesian Analysis of Change Point ProblemsDocument13 pagesJournal of Statistical Software: BCP: An R Package For Performing A Bayesian Analysis of Change Point ProblemsMardison Carolus PurbaNo ratings yet
- Biostat Lecture 10Document47 pagesBiostat Lecture 10Makadiewo baNo ratings yet
- Linear Regression Analysis For STARDEX: Trend CalculationDocument6 pagesLinear Regression Analysis For STARDEX: Trend CalculationSrinivasu UpparapalliNo ratings yet
- NHNRM spl11pmdDocument10 pagesNHNRM spl11pmdSambit Prasad KarNo ratings yet
- A Fast Algorithm For S-Regression EstimatesDocument15 pagesA Fast Algorithm For S-Regression EstimatesWong Chiong LiongNo ratings yet
- Maths Xiith EngDocument139 pagesMaths Xiith EngHarsh VardhanNo ratings yet
- Principal Component AnalysisDocument23 pagesPrincipal Component AnalysisAmandeep SharmaNo ratings yet
- (A) Personal Details Role Name Affiliation: Introduction To Bivariate Linear Regression AnalysisDocument10 pages(A) Personal Details Role Name Affiliation: Introduction To Bivariate Linear Regression AnalysisNeha MishraNo ratings yet
- Continuous L1 Norm Estimation of Lorenz CurveDocument9 pagesContinuous L1 Norm Estimation of Lorenz CurveBangladesh Journal of Multidisciplinary ScientificNo ratings yet
- RJournal 2012-2 Kloke+McKeanDocument8 pagesRJournal 2012-2 Kloke+McKeanIntan PurnomosariNo ratings yet
- Technical Report No. 1/12, February 2012 Jackknifing The Ridge Regression Estimator: A Revisit Mansi Khurana, Yogendra P. Chaubey and Shalini ChandraDocument22 pagesTechnical Report No. 1/12, February 2012 Jackknifing The Ridge Regression Estimator: A Revisit Mansi Khurana, Yogendra P. Chaubey and Shalini ChandraRatna YuniartiNo ratings yet
- Piecewise-Polynomial Regression TreesDocument30 pagesPiecewise-Polynomial Regression Treesfakihilham2705No ratings yet
- 2018 ChapterDocument16 pages2018 Chapterkasye teshomeNo ratings yet
- Functional Logistic Regression: A Comparison of Three MethodsDocument20 pagesFunctional Logistic Regression: A Comparison of Three MethodsFredy R GomezNo ratings yet
- INTRODocument7 pagesINTRONurul NajlaNo ratings yet
- 13 - Data Mining Within A Regression FrameworkDocument27 pages13 - Data Mining Within A Regression FrameworkEnzo GarabatosNo ratings yet
- Sciencedirect: Categorical Principal Component Logistic Regression: A Case Study For Housing Loan ApprovalDocument7 pagesSciencedirect: Categorical Principal Component Logistic Regression: A Case Study For Housing Loan ApprovalAncyMariyaNo ratings yet
- Param Estim TikhonovDocument16 pagesParam Estim TikhonovYacer Hadadi RadwanNo ratings yet
- Parameter Estimation For Operator Scaling Ran 2014 Journal of Multivariate ADocument12 pagesParameter Estimation For Operator Scaling Ran 2014 Journal of Multivariate AfmokademNo ratings yet
- Support Vector Clustering: Journal of Machine Learning Research 2 (2001) 125-137 Submitted 3/04 Published 12/01Document13 pagesSupport Vector Clustering: Journal of Machine Learning Research 2 (2001) 125-137 Submitted 3/04 Published 12/01jimakosjpNo ratings yet
- Case Studies in PK Manual 22-23Document98 pagesCase Studies in PK Manual 22-23Rasha MohammadNo ratings yet
- Agresti 1995Document10 pagesAgresti 1995Nughthoh Arfawi KurdhiNo ratings yet
- Sim 6893Document13 pagesSim 6893Oyebayo Ridwan OlaniranNo ratings yet
- 15Document10 pages15mayrstjkNo ratings yet
- The MIT PressDocument12 pagesThe MIT PressGHULAM MURTAZANo ratings yet
- American Statistical Association American Society For QualityDocument8 pagesAmerican Statistical Association American Society For QualityAlbanita MendesNo ratings yet
- Ridge Regression and Ill-ConditioningDocument10 pagesRidge Regression and Ill-ConditioningionhandshakerNo ratings yet
- On The Fault-Tolerant Metric Dimension of Convex PolytopesDocument14 pagesOn The Fault-Tolerant Metric Dimension of Convex PolytopesUsman KheraNo ratings yet
- Divide and Conquer Kernel Ridge Regression: University of California, Berkeley University of California, BerkeleyDocument26 pagesDivide and Conquer Kernel Ridge Regression: University of California, Berkeley University of California, BerkeleyTiberiu TincaNo ratings yet
- GH Biplot in Reduced-Rank Regression Based On Partial Least SquaresDocument18 pagesGH Biplot in Reduced-Rank Regression Based On Partial Least Squareswillin alvarezNo ratings yet
- Social Indicators Research 45: 253-275, 1998Document23 pagesSocial Indicators Research 45: 253-275, 1998thyagosmesmeNo ratings yet
- The Geometry of Partial Least SquaresDocument28 pagesThe Geometry of Partial Least SquaresLata DeshmukhNo ratings yet
- Chapter 5 Analysis of Several Groups Canonical Variate Analysis - 1999 - Aspects of Multivariate Statistical Analysis in GeologyDocument37 pagesChapter 5 Analysis of Several Groups Canonical Variate Analysis - 1999 - Aspects of Multivariate Statistical Analysis in GeologyAnderson CarvalhoNo ratings yet
- Multiple Regression in Psychological ResDocument22 pagesMultiple Regression in Psychological ResAndrhea PeraltaNo ratings yet
- Chapter 6 Correlating Between Sets - 1999 - Aspects of Multivariate Statistical Analysis in GeologyDocument14 pagesChapter 6 Correlating Between Sets - 1999 - Aspects of Multivariate Statistical Analysis in GeologyAnderson CarvalhoNo ratings yet
- Stata Lecture2Document134 pagesStata Lecture2lukyindonesiaNo ratings yet
- Exponential Convergence Rates For Batch Normalization - 2Document1 pageExponential Convergence Rates For Batch Normalization - 2octoparse8No ratings yet
- Bar Gera2016Document28 pagesBar Gera2016hennaouisihamNo ratings yet
- Sparse Principal Component AnalysisDocument23 pagesSparse Principal Component Analysis方鑫然No ratings yet
- SeriationDocument37 pagesSeriationCarlaNo ratings yet
- Regression Analysis (Spring, 2000) : by WonjaeDocument6 pagesRegression Analysis (Spring, 2000) : by WonjaeLucian MaxNo ratings yet
- I J MC 118691457987400Document13 pagesI J MC 118691457987400desiNo ratings yet
- Functional Local Linear Estimate For Functional Relative-Error RegressionDocument20 pagesFunctional Local Linear Estimate For Functional Relative-Error Regressionالشمس اشرقتNo ratings yet
- Simple Regression Model: Erbil Technology InstituteDocument9 pagesSimple Regression Model: Erbil Technology Institutemhamadhawlery16No ratings yet
- Asymptotic Properties of Penalized Spline Estimators: Faculty of Business and EconomicsDocument32 pagesAsymptotic Properties of Penalized Spline Estimators: Faculty of Business and EconomicsQfS1ahlNo ratings yet
- 4 Shrinkage Structure of Partial Least SquaresDocument6 pages4 Shrinkage Structure of Partial Least Squares14. Nhật DuyNo ratings yet
- User2007 Josse Le HussonDocument8 pagesUser2007 Josse Le HussonAdonai SalaNo ratings yet
- Sciencedirect: Categorical Principal Component Logistic Regression: A Case Study For Housing Loan ApprovalDocument7 pagesSciencedirect: Categorical Principal Component Logistic Regression: A Case Study For Housing Loan ApprovallaylaNo ratings yet
- Regularization Paths For Generalized Linear Models Via Coordinate DescentDocument24 pagesRegularization Paths For Generalized Linear Models Via Coordinate DescentliuNo ratings yet
- Decomposition STATADocument27 pagesDecomposition STATARakesh ChandraNo ratings yet
- Multidimensional Data AnalysisDocument24 pagesMultidimensional Data AnalysisNovia WidyaNo ratings yet
- Vector and Tensor Analysis with ApplicationsFrom EverandVector and Tensor Analysis with ApplicationsRating: 4 out of 5 stars4/5 (10)
- Wire Rope LubricatorDocument8 pagesWire Rope LubricatorvlmiltonNo ratings yet
- Applications and Interpretation Higher November 2021 Paper 3 MSDocument12 pagesApplications and Interpretation Higher November 2021 Paper 3 MSsachinNo ratings yet
- A Comparison of AASHTO Bridge Load Rating MethodsDocument103 pagesA Comparison of AASHTO Bridge Load Rating MethodsVietanh Phung100% (1)
- Xim National ConferenceDocument6 pagesXim National ConferenceNida KhatriNo ratings yet
- Grammar Review: My School FriendsDocument2 pagesGrammar Review: My School Friendsлюдмила ветроваNo ratings yet
- Acadamic StressDocument23 pagesAcadamic Stressalene100% (1)
- Ich E2f DsurDocument23 pagesIch E2f Dsurvinay patidarNo ratings yet
- Calculating Azimuth: (An Oblate Spheroid)Document4 pagesCalculating Azimuth: (An Oblate Spheroid)jobertNo ratings yet
- Piotr Blumczyński - Experiencing Translationality - Material and Metaphorical Journeys-Routledge (2023)Document223 pagesPiotr Blumczyński - Experiencing Translationality - Material and Metaphorical Journeys-Routledge (2023)Ambreen AbbasNo ratings yet
- Critical Response Essay ExampleDocument6 pagesCritical Response Essay ExampleafabifazvNo ratings yet
- Ngo Writ 2 Reflective LetterDocument6 pagesNgo Writ 2 Reflective Letterapi-656316973No ratings yet
- Comprehension AnswerDocument8 pagesComprehension AnswerJani Arun Augustin RajaNo ratings yet
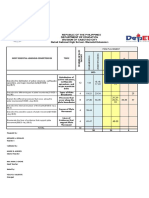
- Science 10 TosDocument5 pagesScience 10 TosMenard Licuanan RosalesNo ratings yet
- Test Report Part 27 PDFDocument53 pagesTest Report Part 27 PDFPabl OrozkoNo ratings yet
- Technology in The Ancient WorldDocument66 pagesTechnology in The Ancient WorldAngela Danielle Tan100% (1)
- Anna University:: Chennai - 600 025: EXAMINATION HALL TICKET (212614114305)Document2 pagesAnna University:: Chennai - 600 025: EXAMINATION HALL TICKET (212614114305)Kranthy JcNo ratings yet
- Social Theory As Habitus (OCR)Document10 pagesSocial Theory As Habitus (OCR)vcvc vcvcNo ratings yet
- English Code Phonics Book 2Document51 pagesEnglish Code Phonics Book 2Jezabel Escobar100% (1)
- Purba 2018 IOP Conf. Ser. Earth Environ. Sci. 209 012011Document12 pagesPurba 2018 IOP Conf. Ser. Earth Environ. Sci. 209 012011donshaNo ratings yet
- Emf PDFDocument225 pagesEmf PDFDivya KishorNo ratings yet
- CAP22IP600132Document2 pagesCAP22IP600132lakshmipriya upNo ratings yet
- Test of Performance StrategiesDocument4 pagesTest of Performance StrategiesmaytevaosNo ratings yet
- Draft Eshs Report SN28102022 - FM - 15112022Document8 pagesDraft Eshs Report SN28102022 - FM - 15112022mmarshalzNo ratings yet
- 2 Teak DeckingDocument25 pages2 Teak DeckingJoshua Swee100% (1)
- The Tritonet Approach To Music Theory PDFDocument30 pagesThe Tritonet Approach To Music Theory PDFSelçuk Canberk DağtekinNo ratings yet
- Flare Pit Cleaning TechnologyDocument27 pagesFlare Pit Cleaning TechnologyAhmed GamaladdinNo ratings yet
- Design of Pot Ptfe Bearing (Fixed Bearing) As Per Irc 83:2002 (Part 3)Document7 pagesDesign of Pot Ptfe Bearing (Fixed Bearing) As Per Irc 83:2002 (Part 3)DPJAIN INFRASTRUCTURE100% (2)
- Task 2 Writing Task Yasneidy ContrerasDocument3 pagesTask 2 Writing Task Yasneidy ContrerasDaniela santanderNo ratings yet
- C-Reactive Protein (CRP)Document9 pagesC-Reactive Protein (CRP)Ibrahim Alturaiki100% (1)