Download as pdf or txt
You might also like
- Pointe 180 Service Manual Rev D PDFDocument59 pagesPointe 180 Service Manual Rev D PDFMDD EngineeringNo ratings yet
- EN Em-243cDocument2 pagesEN Em-243cAbu Bakr M. SaeedNo ratings yet
- Em-347 Brushless Dc-Motor Driver 12-36V 35A: Electromen OyDocument2 pagesEm-347 Brushless Dc-Motor Driver 12-36V 35A: Electromen OysaravananNo ratings yet
- Chroma Bidirectional DC Power Supply Model 62000D SeriesDocument12 pagesChroma Bidirectional DC Power Supply Model 62000D SeriesaboofazilNo ratings yet
- 5 300 HP - 3 PHASE, 50/60 HZDocument2 pages5 300 HP - 3 PHASE, 50/60 HZtuNo ratings yet
- Max5090A/B/C 2A, 76V, High-Efficiency Maxpower Step-Down DC-DC ConvertersDocument17 pagesMax5090A/B/C 2A, 76V, High-Efficiency Maxpower Step-Down DC-DC ConvertersDuc VoquangNo ratings yet
- Features Description: LTC3894 150V Low I Step-Down DC/DC Controller With 100% Duty Cycle CapabilityDocument32 pagesFeatures Description: LTC3894 150V Low I Step-Down DC/DC Controller With 100% Duty Cycle CapabilitydjebinNo ratings yet
- Power: Sharing With SimplicityDocument4 pagesPower: Sharing With SimplicitymardianNo ratings yet
- HBG-60P: 60W Constant Current Mode LED DriverDocument5 pagesHBG-60P: 60W Constant Current Mode LED DriverJuan Manuel JorqueraNo ratings yet
- Wireless HIWEIGH 2018Document1 pageWireless HIWEIGH 2018Agustin MrqzNo ratings yet
- Servostep Drives: Specifications Step & Direction or AnalogDocument2 pagesServostep Drives: Specifications Step & Direction or AnalogAlexNo ratings yet
- Nidec Leroy-Somer D550 DIGITAL AVR DataDocument118 pagesNidec Leroy-Somer D550 DIGITAL AVR DataBasman George100% (1)
- Zero Voltage Switch CA3059: ON SemiconductorDocument8 pagesZero Voltage Switch CA3059: ON SemiconductordangthanhlinhNo ratings yet
- 200ma, Automotive, Ultra-Low Quiescent Current, Linear RegulatorDocument15 pages200ma, Automotive, Ultra-Low Quiescent Current, Linear RegulatorAbdul KurniadiNo ratings yet
- Low Voltage Alternators - 4 Pole: TAL-A46 - TAL-A47 - TAL-A49Document5 pagesLow Voltage Alternators - 4 Pole: TAL-A46 - TAL-A47 - TAL-A49Duc Thao VuNo ratings yet
- Leroy Somer - AlternatorsDocument12 pagesLeroy Somer - AlternatorsRWBalmeloNo ratings yet
- Datasheet 24Document28 pagesDatasheet 24segundo zapataNo ratings yet
- Tough 3300 5000 MinDocument1 pageTough 3300 5000 Minkhal manNo ratings yet
- Bobina ProporcionalDocument3 pagesBobina ProporcionalJoms TovarNo ratings yet
- PV1100 Plus Series: SpecificationDocument1 pagePV1100 Plus Series: Specificationtim blackNo ratings yet
- Copley Controls 7225acDocument12 pagesCopley Controls 7225acمحمد خدائیNo ratings yet
- Ower Mplifiers: Rem-S Series-Power AmplifiersDocument4 pagesOwer Mplifiers: Rem-S Series-Power AmplifiersМаксым КовальськыйNo ratings yet
- Data SheetDocument16 pagesData SheetAnangNo ratings yet
- Rx5a FumanDocument7 pagesRx5a FumanOrlando CastroNo ratings yet
- STMicroelectronics L4962E A DatasheetDocument16 pagesSTMicroelectronics L4962E A DatasheetJosé AdelinoNo ratings yet
- Inversor Dinamo 5KW + Cont + Carg 5KW + ParaleloDocument1 pageInversor Dinamo 5KW + Cont + Carg 5KW + ParaleloJesus ItaNo ratings yet
- LT3865 FBDocument38 pagesLT3865 FBarmin rahmatiNo ratings yet
- MAX16910 200ma, Automotive, Ultra-Low Quiescent Current, Linear RegulatorDocument15 pagesMAX16910 200ma, Automotive, Ultra-Low Quiescent Current, Linear RegulatorAbdul KurniadiNo ratings yet
- Sofar Data SheetDocument1 pageSofar Data Sheetfilip100No ratings yet
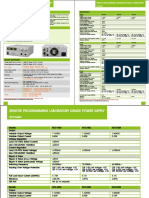
- Remote Programming Laboratory Grade Power Supply Remote Programming Laboratory Grade Power SupplyDocument2 pagesRemote Programming Laboratory Grade Power Supply Remote Programming Laboratory Grade Power SupplyVictor RamirezNo ratings yet
- 307 User PortugeseDocument2 pages307 User PortugeseLeandro MauricioNo ratings yet
- A3946 Datasheet PDFDocument14 pagesA3946 Datasheet PDFcarlos.ramNo ratings yet
- SMF Instruction ManualDocument4 pagesSMF Instruction ManualKan KhabourNo ratings yet
- DC Input, Field Configurable Limit Alarms - AP1080/1090: Diagnostic LEDDocument5 pagesDC Input, Field Configurable Limit Alarms - AP1080/1090: Diagnostic LEDMohamed ShabanNo ratings yet
- 400Hz Ground Power Unit: FeaturesDocument3 pages400Hz Ground Power Unit: Featurestuyen vuNo ratings yet
- Proportional Valve Controller-PCB Only-: Electronic ControlsDocument2 pagesProportional Valve Controller-PCB Only-: Electronic ControlsSIVARAMANJAGANATHANNo ratings yet
- Sofar 110 KWDocument1 pageSofar 110 KWHamza RehanNo ratings yet
- DRP 3200 SpecDocument6 pagesDRP 3200 Specqaled electronics co., ltdNo ratings yet
- WattNode 1-3phase - MODBUS - OneTempDocument2 pagesWattNode 1-3phase - MODBUS - OneTempRoman PacnikNo ratings yet
- Guia de ReciclajeDocument1 pageGuia de ReciclajeMadd000No ratings yet
- 9115 Series DatasheetDocument7 pages9115 Series DatasheetAlain MoralesNo ratings yet
- Mind-B Series Mind-B Series: Stepping Motor DrivesDocument2 pagesMind-B Series Mind-B Series: Stepping Motor DrivesAlberto ZilioNo ratings yet
- 7902B24V Full en Metric LetterDocument2 pages7902B24V Full en Metric Letters bNo ratings yet
- Data Sheet SURTA3000XL Ficha Tecnica Ups 3kva APC Rack Larga Autonomía para David RomeroDocument4 pagesData Sheet SURTA3000XL Ficha Tecnica Ups 3kva APC Rack Larga Autonomía para David RomeroJorge Iván Bustamante LoperaNo ratings yet
- PV1500Document1 pagePV1500Diego SousaNo ratings yet
- Proportional Valve Controller-PCB Only-: Electronic ControlsDocument2 pagesProportional Valve Controller-PCB Only-: Electronic ControlsSIVARAMANJAGANATHANNo ratings yet
- Elmeasure Energy Process Monitor CatalogDocument1 pageElmeasure Energy Process Monitor CatalogSEO BDMNo ratings yet
- Carlo - Gavazzi RGC2P60V75C1DFM Datasheet PDFDocument29 pagesCarlo - Gavazzi RGC2P60V75C1DFM Datasheet PDFmikeNo ratings yet
- Poly Phase Multifunction Energy Metering IC With Per Phase InformationDocument72 pagesPoly Phase Multifunction Energy Metering IC With Per Phase InformationOcéane SavaryNo ratings yet
- Power: Sharing With SimplicityDocument4 pagesPower: Sharing With Simplicitybryan monteiroNo ratings yet
- Datasheet - 802 Series PDFDocument4 pagesDatasheet - 802 Series PDFAndrew MorrisonNo ratings yet
- PM174 Powermeter: Quick Start GuideDocument11 pagesPM174 Powermeter: Quick Start Guideusamakhan205No ratings yet
- STP110 60 DS en 10Document2 pagesSTP110 60 DS en 10Mohamed MourtagaNo ratings yet
- DSE 7520 Data SheetDocument4 pagesDSE 7520 Data SheetLucza ImreNo ratings yet
- LT 8364Document32 pagesLT 8364gtcv805No ratings yet
- 62EM1 62mmElectricalMain1SpecSheetV10Document17 pages62EM1 62mmElectricalMain1SpecSheetV10Andrew SunderlandNo ratings yet
- VS1MD Data SheetDocument4 pagesVS1MD Data Sheetskeyser34No ratings yet
- AC Power Transducer User ManualDocument4 pagesAC Power Transducer User ManualKhaled El-BeheryNo ratings yet
- Ehh AmpDocument12 pagesEhh AmpBRUNONo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- RG174Document3 pagesRG174jonathan.boussoir2215No ratings yet
- RG179B UDocument3 pagesRG179B Ujonathan.boussoir2215No ratings yet
- MC74VHC245 Octal Bus Buffer/Line Driver: Marking DiagramsDocument8 pagesMC74VHC245 Octal Bus Buffer/Line Driver: Marking Diagramsjonathan.boussoir2215No ratings yet
- Onsms16062 1Document20 pagesOnsms16062 1jonathan.boussoir2215No ratings yet
- Ucc 27624Document37 pagesUcc 27624jonathan.boussoir2215No ratings yet
- BC847BPNDocument5 pagesBC847BPNjonathan.boussoir2215No ratings yet
- Sn74lv86a EpDocument12 pagesSn74lv86a Epjonathan.boussoir2215No ratings yet
- SSDG535 CDocument7 pagesSSDG535 Cjonathan.boussoir2215No ratings yet
- TLP2767 TLP2767 TLP2767 TLP2767: 1. 1. 1. 1. Applications Applications Applications ApplicationsDocument20 pagesTLP2767 TLP2767 TLP2767 TLP2767: 1. 1. 1. 1. Applications Applications Applications Applicationsjonathan.boussoir2215No ratings yet
- Electromagnetism Course Notes (PHYS09060) 2017/18Document98 pagesElectromagnetism Course Notes (PHYS09060) 2017/18KeKa TVNo ratings yet
- Final-Revise-Research CHALLENGES ENCOUNTERED IN PCB LAYOUTDocument70 pagesFinal-Revise-Research CHALLENGES ENCOUNTERED IN PCB LAYOUTMark Anthony RamosNo ratings yet
- Placas de TOSHIBA A1C-1401 PCB VRFDocument141 pagesPlacas de TOSHIBA A1C-1401 PCB VRFPatricia PortelaNo ratings yet
- Service Manual: SupplementDocument6 pagesService Manual: Supplement王宗超No ratings yet
- Science 9 Q4 SML17 V2Document15 pagesScience 9 Q4 SML17 V2HotdogNo ratings yet
- Evaluation of Cordic Algorithms For Fpga Design PDFDocument2 pagesEvaluation of Cordic Algorithms For Fpga Design PDFCynthiaNo ratings yet
- Revision Notes For Science Chapter 13 - Magnetic Effects of Electric Current (Class 10th) - askIITiansDocument5 pagesRevision Notes For Science Chapter 13 - Magnetic Effects of Electric Current (Class 10th) - askIITianshariom sharmaNo ratings yet
- Analysis of 12 Pulse Phase Control AC DC ConverterDocument10 pagesAnalysis of 12 Pulse Phase Control AC DC ConverterRizky Patra JayaNo ratings yet
- Steps To A Successful Profibus ProjectDocument46 pagesSteps To A Successful Profibus Projectalfredo_mqi100% (1)
- Gtv350mpzi04 (Ili9481) PDFDocument143 pagesGtv350mpzi04 (Ili9481) PDFaraikNo ratings yet
- E3500Document76 pagesE3500JoseAugustoOsteicoecheaNo ratings yet
- As Shipped 9KS Prefix (Starboard)Document3 pagesAs Shipped 9KS Prefix (Starboard)Muhammad Ary safartaNo ratings yet
- MN704 00011 1v0 EDocument1,138 pagesMN704 00011 1v0 EmailatpuneNo ratings yet
- Contactores Epcos-ElecondDocument11 pagesContactores Epcos-ElecondhuincaelectricidadNo ratings yet
- Single Phase Whole Current Energy Meter Em101plusDocument3 pagesSingle Phase Whole Current Energy Meter Em101plusSomnath DasNo ratings yet
- CAD Lab NUSTDocument6 pagesCAD Lab NUSTHassnain ArshadNo ratings yet
- Product Applications en A2020Document4 pagesProduct Applications en A2020luat1983No ratings yet
- DTC B2799 Engine Immobilizer System Malfunction: Circuit DescriptionDocument2 pagesDTC B2799 Engine Immobilizer System Malfunction: Circuit DescriptionObd King TgiNo ratings yet
- Servomex 1800 1900 Manual PDFDocument122 pagesServomex 1800 1900 Manual PDFbrunolacerdajrNo ratings yet
- Wi-Fi & Bluetooth LE SoC NANO (BK7231N) - Documentation - DocumentationDocument20 pagesWi-Fi & Bluetooth LE SoC NANO (BK7231N) - Documentation - DocumentationBantunegerNo ratings yet
- Rajasekhar ResumeDocument2 pagesRajasekhar ResumeAdoni RajasekharNo ratings yet
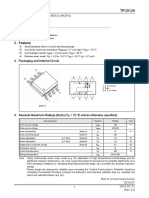
- TPC8129 Datasheet en 20140121 PDFDocument9 pagesTPC8129 Datasheet en 20140121 PDFCHARIS ZEVGARASNo ratings yet
- NGPON2Document15 pagesNGPON2Tu HaiNo ratings yet
- A3377module1+2 NumericalDocument11 pagesA3377module1+2 NumericalSomil GuptaNo ratings yet
- Sh030302enga - MR-J5 User Manual (Communication Function)Document48 pagesSh030302enga - MR-J5 User Manual (Communication Function)zhaodong.liangNo ratings yet
- CGCM and Z159 AbstractDocument8 pagesCGCM and Z159 AbstractPengpeng NingNo ratings yet
- Olympiad Booster: Physics-IiDocument20 pagesOlympiad Booster: Physics-IiSahil GillNo ratings yet
- 07 01 RA41207EN60GLA0 Cell RangeDocument35 pages07 01 RA41207EN60GLA0 Cell RangeMrr RithNo ratings yet
- Understanding ICSP For PIC MicrocontrollersDocument9 pagesUnderstanding ICSP For PIC MicrocontrollersKhubaib Ahmed100% (1)