Download as pdf or txt
You might also like
- Chapter 9Document4 pagesChapter 9Janica Rheanne JapsayNo ratings yet
- Ijesat 2012 02 01 02Document4 pagesIjesat 2012 02 01 02Ijesat JournalNo ratings yet
- Performance Analysis of Multicarrier DS-CDMA System Using BPSK ModulationDocument7 pagesPerformance Analysis of Multicarrier DS-CDMA System Using BPSK ModulationiaetsdiaetsdNo ratings yet
- Communication 1Document3 pagesCommunication 1RohitNo ratings yet
- Spread Spectrum SystemsDocument17 pagesSpread Spectrum SystemsAnonymous H0SJWZE8No ratings yet
- Performance Evaluation of Ds-Cdma System Using MatlabDocument13 pagesPerformance Evaluation of Ds-Cdma System Using MatlabMuhammad FirdausNo ratings yet
- Analysis of Dsss Performance Under Communication-Jamming EnvironmentDocument8 pagesAnalysis of Dsss Performance Under Communication-Jamming EnvironmentvivgoNo ratings yet
- 08 Chapter3 PDFDocument13 pages08 Chapter3 PDFatr72enggchennaiNo ratings yet
- Lecture 20 Direct Sequence Spread SpectrumDocument13 pagesLecture 20 Direct Sequence Spread Spectrumn4vrxcryNo ratings yet
- Literature Survey of Direct Sequence Spread Spectrum SystemDocument10 pagesLiterature Survey of Direct Sequence Spread Spectrum SystemDheyauldeen NajimNo ratings yet
- ReportDocument10 pagesReportharika mandadapuNo ratings yet
- Design & Simulation of DSSSS Using MATLAB SIMULINKDocument16 pagesDesign & Simulation of DSSSS Using MATLAB SIMULINKNaman ChandNo ratings yet
- Channel Coding For Underwater Acoustic Communication SystemDocument4 pagesChannel Coding For Underwater Acoustic Communication SystemmyonesloveNo ratings yet
- 5.another Format Paper 2Document6 pages5.another Format Paper 2iisteNo ratings yet
- Bandwidth Enhancement: Correcting Magnitude and Phase Distortion in Wideband Piezoelectric Transducer SystemsDocument11 pagesBandwidth Enhancement: Correcting Magnitude and Phase Distortion in Wideband Piezoelectric Transducer Systemssundari_muraliNo ratings yet
- Performance Analysis of Error Control Coding and DDocument8 pagesPerformance Analysis of Error Control Coding and DNegese TeklearegayNo ratings yet
- Data Directed Estimation Techniques For Single-Tone HF ModemsDocument10 pagesData Directed Estimation Techniques For Single-Tone HF Modemsradga1977No ratings yet
- Analog and Digital CommunicationDocument11 pagesAnalog and Digital CommunicationKarthi KeyanNo ratings yet
- UBvhinostroza 128Document8 pagesUBvhinostroza 128Ubiquitous Computing and Communication JournalNo ratings yet
- Transmitter and ReceiverDocument28 pagesTransmitter and ReceiverVinod NayyarNo ratings yet
- Channel Sounding: HZ) - The Signal IsDocument14 pagesChannel Sounding: HZ) - The Signal IsersinNo ratings yet
- (N) and S (N) of Length N (With S (N) S (N) 0 For N N) TheDocument8 pages(N) and S (N) of Length N (With S (N) S (N) 0 For N N) TheSiddhartha DasNo ratings yet
- Project Report On Performance of Digital Modulation TechniquesDocument8 pagesProject Report On Performance of Digital Modulation Techniqueseshet chafNo ratings yet
- Performance of Ds/Cdma Systems With Differential M-Ary Orthogonal Modulation and Rs-Coding For Leo Satellite CommunicationsDocument7 pagesPerformance of Ds/Cdma Systems With Differential M-Ary Orthogonal Modulation and Rs-Coding For Leo Satellite CommunicationsCường Sống ThiệnNo ratings yet
- Data Throughputs Using Multiple-Input Multiple-Output (Mimo) Techniques in A Noise-Limited Cellular EnvironmentDocument40 pagesData Throughputs Using Multiple-Input Multiple-Output (Mimo) Techniques in A Noise-Limited Cellular EnvironmentloaidNo ratings yet
- Differential Phase-Shift Keying (DPSK)Document26 pagesDifferential Phase-Shift Keying (DPSK)Geneva Joyce TorresNo ratings yet
- Antenna Noise Temperature Measurement System - NTMSDocument4 pagesAntenna Noise Temperature Measurement System - NTMSkdebesNo ratings yet
- 2094expt 9 - PN Code - NewDocument3 pages2094expt 9 - PN Code - NewXavierNo ratings yet
- Wireless Communication - EC 2401 - I - Answer KeyDocument9 pagesWireless Communication - EC 2401 - I - Answer KeySriramNo ratings yet
- DSSSDocument9 pagesDSSSŞtefan PruteanuNo ratings yet
- Sree Narayana Mangalam Institute of Management and Technology Maliankara.P.O., North Paravoor Ernakulam District, Pin: 683516Document6 pagesSree Narayana Mangalam Institute of Management and Technology Maliankara.P.O., North Paravoor Ernakulam District, Pin: 683516motturoshNo ratings yet
- Spread Spectrum Ultrasonic Positioning SystemDocument6 pagesSpread Spectrum Ultrasonic Positioning SystemTuấn DũngNo ratings yet
- A Survey On Digital Modulation Techniques For Software Defined Radio ApplicationsDocument8 pagesA Survey On Digital Modulation Techniques For Software Defined Radio Applicationssreekanthreddy peramNo ratings yet
- Multi-User Detection For OS-COMA Communications: Topics in Personal CommunicationsDocument14 pagesMulti-User Detection For OS-COMA Communications: Topics in Personal CommunicationssantoshnemadeNo ratings yet
- Ece LabDocument11 pagesEce LabRasool ReddyNo ratings yet
- TDOA WPNC - 2013 (WSN)Document4 pagesTDOA WPNC - 2013 (WSN)cuteabhi47No ratings yet
- 08-06-2022-1654686796-6-.-4. Engg - Enhanced Underwater Acoustic Communication Using F-SGM and Spectral Coherence Based Wavelet TransformDocument8 pages08-06-2022-1654686796-6-.-4. Engg - Enhanced Underwater Acoustic Communication Using F-SGM and Spectral Coherence Based Wavelet TransformImpact JournalsNo ratings yet
- Telecommunication Switching Lab FileDocument62 pagesTelecommunication Switching Lab FileRadhika RaghavNo ratings yet
- Digital Equalization of Chromatic Dispersion and Polarization Mode DispersionDocument11 pagesDigital Equalization of Chromatic Dispersion and Polarization Mode DispersionAliAzarniaNo ratings yet
- VisnavDocument19 pagesVisnavInduchoodan RajendranNo ratings yet
- Frequency Domain Techniques For Void Spectrum Detection in Cognitive Radio NetworkDocument20 pagesFrequency Domain Techniques For Void Spectrum Detection in Cognitive Radio NetworkPRANAV KUMAR 17BEC0473No ratings yet
- Digital ModulationDocument9 pagesDigital ModulationAdel AdelNo ratings yet
- AssignmentDocument9 pagesAssignmentkrishankant maniNo ratings yet
- Comparing Denoising Performance of DWT, WPT, SWT and DT-CWT For Partial Discharge Signals Article 2Document6 pagesComparing Denoising Performance of DWT, WPT, SWT and DT-CWT For Partial Discharge Signals Article 2hamid1358No ratings yet
- A Calibration System and Perturbation Analysis For The Modulated Wideband ConverterDocument4 pagesA Calibration System and Perturbation Analysis For The Modulated Wideband ConverterShafayat AbrarNo ratings yet
- Nonlinear Power Response in Heterodyne Photonic Radiometers For Microwave Remote SensingDocument4 pagesNonlinear Power Response in Heterodyne Photonic Radiometers For Microwave Remote SensingGergő BárdosNo ratings yet
- v-BLAST - An Architecture For Realizing Very High Data Rates Over The Rich-Scattering Wireless ChannelDocument6 pagesv-BLAST - An Architecture For Realizing Very High Data Rates Over The Rich-Scattering Wireless ChannelSharanya VaidyanathNo ratings yet
- MSK ModulationDocument4 pagesMSK ModulationAvtar SinghNo ratings yet
- Ultrasound Modulation and Codification For Localization SystemsDocument12 pagesUltrasound Modulation and Codification For Localization SystemsNguyen Tuan DanhNo ratings yet
- Keshav (2022jop2591)Document5 pagesKeshav (2022jop2591)keshavNo ratings yet
- Answer 1.1%Document29 pagesAnswer 1.1%Anonymous 7puVtTdpVNo ratings yet
- Dds IntroDocument6 pagesDds IntroYermakov Vadim IvanovichNo ratings yet
- 1803 Long Haul Digital Backpropagation Optimization High Baudrate Single Channel 2Document6 pages1803 Long Haul Digital Backpropagation Optimization High Baudrate Single Channel 2Nguyen HongkiemNo ratings yet
- Anti Ali ADocument17 pagesAnti Ali Asaske969No ratings yet
- Adaptive Channel Estimation For Underwater Acoustic Mimo Ofdm SystemsDocument6 pagesAdaptive Channel Estimation For Underwater Acoustic Mimo Ofdm SystemsDHBKHNDT6No ratings yet
- Spectral Correlation Based Signal Detection MethodDocument6 pagesSpectral Correlation Based Signal Detection Methodlogu_thalirNo ratings yet
- Advanced Coding For Underwater CommunicationDocument20 pagesAdvanced Coding For Underwater CommunicationDamianNo ratings yet
- Ec 2004 (PDC) - CS - End - May - 2023Document24 pagesEc 2004 (PDC) - CS - End - May - 2023223UTKARSH TRIVEDINo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- RM-DAY 1 BER and SNRDocument17 pagesRM-DAY 1 BER and SNRsurendranathNo ratings yet
- Double The Data Rate in Underwater Acoustic Communication Using OFDM Based On Subcarrier Power ModulationDocument14 pagesDouble The Data Rate in Underwater Acoustic Communication Using OFDM Based On Subcarrier Power ModulationsurendranathNo ratings yet
- 03 Application Form TeachingDocument5 pages03 Application Form TeachingsurendranathNo ratings yet
- Edited ProjectDocument48 pagesEdited ProjectsurendranathNo ratings yet
- Master List of Digital Television Channels (Romania) - TVCL - TV Channel ListsDocument18 pagesMaster List of Digital Television Channels (Romania) - TVCL - TV Channel ListsAndrei Augustin DogaruNo ratings yet
- Designing A Crosspatch System To Interface Between HF and VHF Radios Using RSSIDocument6 pagesDesigning A Crosspatch System To Interface Between HF and VHF Radios Using RSSIyanmyoaungo7No ratings yet
- Universal Rts Interface Ii: Operating InstructionsDocument3 pagesUniversal Rts Interface Ii: Operating InstructionsGuto MattosNo ratings yet
- EELA-Audio-SRM90-S72 (E) Line Input Module With - Without E.Q.Document16 pagesEELA-Audio-SRM90-S72 (E) Line Input Module With - Without E.Q.Jose Carlos SoaresNo ratings yet
- Microwave Lab ManualDocument48 pagesMicrowave Lab ManualAbuzar shakeelNo ratings yet
- EZW60 User Manual A4 PDFDocument214 pagesEZW60 User Manual A4 PDFEm GomezNo ratings yet
- TIA-862-B Draft 3 Due 2014-12-29Document43 pagesTIA-862-B Draft 3 Due 2014-12-29pabloabelgilsotoNo ratings yet
- ADC Exp-06Document5 pagesADC Exp-06anika tabassumNo ratings yet
- LDMOS Ruggedness ReliabilityDocument5 pagesLDMOS Ruggedness ReliabilityParansaranNo ratings yet
- Isat 200aDocument2 pagesIsat 200akamalmatsaidNo ratings yet
- Department Orders/Cfficulars: and MinistryDocument5 pagesDepartment Orders/Cfficulars: and MinistrytatsNo ratings yet
- Marker Beacon (Wikipedia Reference)Document4 pagesMarker Beacon (Wikipedia Reference)Avinash NagNo ratings yet
- DEH-X1750UB - XNGS XNGS1 DEH-X1750UBG - XNGS Owners ManualDocument64 pagesDEH-X1750UB - XNGS XNGS1 DEH-X1750UBG - XNGS Owners ManualAlini HenriqueNo ratings yet
- Contoh Katalog PulsaDocument10 pagesContoh Katalog PulsaleonardNo ratings yet
- Ta1003 PDFDocument2 pagesTa1003 PDFJoel AgbekponouNo ratings yet
- RF Combining Box: - 3 Bands, 4 Ports For 806-960 / 1710-1880 and 1920-2170 MHZDocument2 pagesRF Combining Box: - 3 Bands, 4 Ports For 806-960 / 1710-1880 and 1920-2170 MHZZoheir KacimiNo ratings yet
- Rut200 Datasheet v14 - 03Document4 pagesRut200 Datasheet v14 - 03Silviu DochiaNo ratings yet
- Openran Commscope MosaicDocument2 pagesOpenran Commscope MosaicBruno MarceloNo ratings yet
- Citizen PMV65-2272 Promaster Watch ENGDocument4 pagesCitizen PMV65-2272 Promaster Watch ENGBill DNo ratings yet
- Why Do Audio Transformers Sound Different From Model To Model?Document16 pagesWhy Do Audio Transformers Sound Different From Model To Model?Charles AustinNo ratings yet
- Pioneer VSX-1016TXVDocument250 pagesPioneer VSX-1016TXVLuiz KrambeckNo ratings yet
- Additional Info Brief-HistoryMILDocument78 pagesAdditional Info Brief-HistoryMILannidk07No ratings yet
- Apxverrl26 CDocument2 pagesApxverrl26 CthesantanderNo ratings yet
- Omnispace Ex Parte F (1) AaDocument20 pagesOmnispace Ex Parte F (1) Aamichael.kanNo ratings yet
- By Order of The AFI 11-2C-141V3 CL-6 Secretary of The Air Force 1 JUNE 2000Document26 pagesBy Order of The AFI 11-2C-141V3 CL-6 Secretary of The Air Force 1 JUNE 2000redsharkNo ratings yet
- Localiser (LOC)Document2 pagesLocaliser (LOC)GreetyNo ratings yet
- Locoloc® #1-Sc Hand Swager WR/04149 WR/04140 WR/04139 9560133940Document1 pageLocoloc® #1-Sc Hand Swager WR/04149 WR/04140 WR/04139 9560133940Manish JhaNo ratings yet
- Guidance On Distress Alerts PDFDocument1 pageGuidance On Distress Alerts PDFTanvir ShovonNo ratings yet
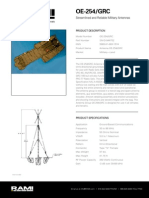
- Rami Mil Oe-254-GrcDocument1 pageRami Mil Oe-254-Grcspidermandude87No ratings yet