Download as pdf or txt
You might also like
- Jeppesen Aircraft Propellers and Controls by Fank DelpDocument159 pagesJeppesen Aircraft Propellers and Controls by Fank Delpandrinjo100% (2)
- Reference of WPS AWSDocument5 pagesReference of WPS AWSKent TanakNo ratings yet
- Train Coupler Longitudinal Effect 13Document22 pagesTrain Coupler Longitudinal Effect 13Chuck LiddellNo ratings yet
- 3500c Auxiliary Engine SchematicDocument2 pages3500c Auxiliary Engine Schematicmohammad hazbehzadNo ratings yet
- 等蹟裝蹦扴Document60 pages等蹟裝蹦扴bo100% (1)
- Peng 1996Document21 pagesPeng 1996Ali ShamsodiniNo ratings yet
- Advanced Robotics: To Cite This Article: Hiroshi Kimura, Isao Shimoyama & Hirofumi Miura (1989) DynamicsDocument21 pagesAdvanced Robotics: To Cite This Article: Hiroshi Kimura, Isao Shimoyama & Hirofumi Miura (1989) DynamicsPrajwal KrishnaNo ratings yet
- Design and Analysis of Lower Control Arm of Suspension SystemDocument9 pagesDesign and Analysis of Lower Control Arm of Suspension SystemDavid Emanuel Gómez VidalNo ratings yet
- Omae 2010-20190Document7 pagesOmae 2010-20190Soledad AceitunoNo ratings yet
- 1 s2.0 S1000936123000912 MainDocument21 pages1 s2.0 S1000936123000912 MainpachterNo ratings yet
- Rigid Rotor Stability Analysis On Finite Hydrostatic Double Layer Porous Oil Journal Bearing With Velocity SlipDocument12 pagesRigid Rotor Stability Analysis On Finite Hydrostatic Double Layer Porous Oil Journal Bearing With Velocity SlipPranab SamantaNo ratings yet
- 2010_Vol48_41-64Document26 pages2010_Vol48_41-64Vicente BentoNo ratings yet
- Applied SciencesDocument21 pagesApplied SciencesNelson AbaraNo ratings yet
- k773 - Useful - Done Dyn PDFDocument116 pagesk773 - Useful - Done Dyn PDFRamy ChaayaNo ratings yet
- Design of A Material Handling Equipment: Belt Conveyor System For Crushed Limestone Using 3 Roll IdlersDocument10 pagesDesign of A Material Handling Equipment: Belt Conveyor System For Crushed Limestone Using 3 Roll IdlersJake OkuyeNo ratings yet
- Design of A Material Handling System To Load and Unload Two Wheelers in A Standard Transportation TrailerDocument5 pagesDesign of A Material Handling System To Load and Unload Two Wheelers in A Standard Transportation TrailerSKL ENGGNo ratings yet
- A Compact Variable Stiffness and Damping Shock Absorber For Vehicle SuspensionDocument10 pagesA Compact Variable Stiffness and Damping Shock Absorber For Vehicle SuspensionMarcu SorinNo ratings yet
- Drive-By-Wire Dynamic Control For Four-Wheel-Steer All-Wheel-Drive VehiclesDocument19 pagesDrive-By-Wire Dynamic Control For Four-Wheel-Steer All-Wheel-Drive VehiclesLuong Ngoc MinhNo ratings yet
- Dynamics Modeling and Control of Active Track Tensioning System For Tracked VehicleDocument13 pagesDynamics Modeling and Control of Active Track Tensioning System For Tracked VehicleH VNo ratings yet
- Bifurcation Analysis of A Railway Wheelset With Nonlinear Wheel-Rail ContactDocument18 pagesBifurcation Analysis of A Railway Wheelset With Nonlinear Wheel-Rail Contactadriana GreguerNo ratings yet
- Derailment Detection SystemDocument6 pagesDerailment Detection SystemreformlightguideNo ratings yet
- Journal of Sound and Vibration: Qinkai Han, Jingshan Zhao, Fulei ChuDocument21 pagesJournal of Sound and Vibration: Qinkai Han, Jingshan Zhao, Fulei ChuDamarla KiranNo ratings yet
- Modal Based Balancing of Rtors Using Differential Evolution AlgorithmDocument7 pagesModal Based Balancing of Rtors Using Differential Evolution AlgorithmJuan Angel Martinez RamirezNo ratings yet
- Jmse 10 01173 v2Document16 pagesJmse 10 01173 v2Dina ANDRIAMAHEFAHERYNo ratings yet
- Experimental Analysis of 2 DOF Quarter-Car PassiveDocument13 pagesExperimental Analysis of 2 DOF Quarter-Car PassiveKapil PawarNo ratings yet
- high-speed-balancing-of-rotors-with-overhangs-when-is-overhang-likely-to-cause-problemsDocument18 pageshigh-speed-balancing-of-rotors-with-overhangs-when-is-overhang-likely-to-cause-problemsVikas Rao CheetiNo ratings yet
- Mse13 53 012074 Abqori PCHDocument15 pagesMse13 53 012074 Abqori PCHNguyễn Văn ĐiệpNo ratings yet
- 2010_Vol48_17-40Document26 pages2010_Vol48_17-40Vicente BentoNo ratings yet
- Vibration Isolation With Clutch Disk Pre-Damper Mechanism For The Idle Rattle PhenomenonDocument18 pagesVibration Isolation With Clutch Disk Pre-Damper Mechanism For The Idle Rattle PhenomenonTuna RefaioğluNo ratings yet
- Ijresm V4 I7 100Document9 pagesIjresm V4 I7 100saxadi4814No ratings yet
- Journal Pone 0280290Document13 pagesJournal Pone 02802902jaiprakash6No ratings yet
- Autonomous Overhead Crane System Using A Fuzzy LogDocument18 pagesAutonomous Overhead Crane System Using A Fuzzy Logtrip3milihNo ratings yet
- 2010_Vol48_65-78Document16 pages2010_Vol48_65-78Vicente BentoNo ratings yet
- Screw Drum Structural Parameters Analysis On Propulsion Performance ImpactDocument10 pagesScrew Drum Structural Parameters Analysis On Propulsion Performance ImpactIJAR JOURNALNo ratings yet
- Design of A Mooring System For An Offshore Structure: A Case Study of 5000 Tonnes Offshore Work Barge (WB)Document11 pagesDesign of A Mooring System For An Offshore Structure: A Case Study of 5000 Tonnes Offshore Work Barge (WB)leokareyxoxoersNo ratings yet
- Designofa Material Handling Equipment Belt Conveyor Systemfor Crushed Limestone Using 3 Roll IdlersDocument8 pagesDesignofa Material Handling Equipment Belt Conveyor Systemfor Crushed Limestone Using 3 Roll Idlerstiransomliljon22No ratings yet
- Design and Experiment of A High-Clearance Self-ProDocument11 pagesDesign and Experiment of A High-Clearance Self-Prokvsj2001No ratings yet
- 00 Bataar A Stochastic Model for Railway Track Assest ManagementDocument10 pages00 Bataar A Stochastic Model for Railway Track Assest ManagementJulian HanggaraNo ratings yet
- Investigation On The Effect of Spindle Speed and Traveller Weight On The Tensile Properties of 21 S Ne Cotton Ring Spun YarnsDocument9 pagesInvestigation On The Effect of Spindle Speed and Traveller Weight On The Tensile Properties of 21 S Ne Cotton Ring Spun YarnsVijay PandeyNo ratings yet
- Applsci 12 07003 v3Document12 pagesApplsci 12 07003 v3avv81419No ratings yet
- 2014 Modellingand Controlofan Overhead Crane Systemwitha Flexible Cableand Large Swing AngleDocument17 pages2014 Modellingand Controlofan Overhead Crane Systemwitha Flexible Cableand Large Swing AngleAnar HaciyevNo ratings yet
- IMechE-PartF 2014Document16 pagesIMechE-PartF 2014harshads1502No ratings yet
- Mooring PublicationDocument11 pagesMooring PublicationNinad Anil Bhaskarwar oe21m012No ratings yet
- Journalof Applied Mechanics Modelingand Analysisofthe Rope Sheave Interactionat Traction InterfaceDocument10 pagesJournalof Applied Mechanics Modelingand Analysisofthe Rope Sheave Interactionat Traction InterfaceNelson Andres Moreno AriasNo ratings yet
- The Use of A VRS-Based Pioneer 3-AT Robot in Pavement InspectionsDocument38 pagesThe Use of A VRS-Based Pioneer 3-AT Robot in Pavement InspectionsTriệu Hùng ZiệtNo ratings yet
- jzus.A1300230Document14 pagesjzus.A1300230Ismail IsmailNo ratings yet
- Pan TribologyInternationalDocument17 pagesPan TribologyInternationallatifa boussaliaNo ratings yet
- Splash Zone Lifting Analysis of Subsea StructuresDocument11 pagesSplash Zone Lifting Analysis of Subsea StructuresAnonymous PibYPghNo ratings yet
- Design of Suspension For Formula Student Race Car - ICOVP2015 - KK21 1Document13 pagesDesign of Suspension For Formula Student Race Car - ICOVP2015 - KK21 1Rishita RajNo ratings yet
- Design and Fabrication of Elevator System Without Using Counter WeightDocument11 pagesDesign and Fabrication of Elevator System Without Using Counter WeightHtun LinnNo ratings yet
- Park 2014Document10 pagesPark 2014Đỗ DũngNo ratings yet
- A Study On The Modeling of A Hexacopter: December 2015Document9 pagesA Study On The Modeling of A Hexacopter: December 2015nkofodileNo ratings yet
- Simulation Research On An Electric Vehicle Chassis System Based On A Collaborative Control SystemDocument18 pagesSimulation Research On An Electric Vehicle Chassis System Based On A Collaborative Control SystemJulius RojoNo ratings yet
- Research ArticleDocument10 pagesResearch Articleattiq ur RehmanNo ratings yet
- Dynamic Coe Cients and Stability Analysis of A Water-Lubricated Hydrostatic Bearing by Solving The Uncoupled Reynolds EquationDocument14 pagesDynamic Coe Cients and Stability Analysis of A Water-Lubricated Hydrostatic Bearing by Solving The Uncoupled Reynolds EquationDEEPESH KUMARNo ratings yet
- (2017) - A Novel Approach To Study Effects of Asymmetric Stiffness On Parametric Instabilities of Multi-Rotor-SystemDocument14 pages(2017) - A Novel Approach To Study Effects of Asymmetric Stiffness On Parametric Instabilities of Multi-Rotor-SystemAgustín Erasmo Juárez MartínezNo ratings yet
- Semiactive Vibration Control of Train Suspension SDocument14 pagesSemiactive Vibration Control of Train Suspension SMustafa ErcümenNo ratings yet
- Tendon-Driven Continuum Robots With Extensible Sections-A Model-Based Evaluation of Path-Following MotionsDocument17 pagesTendon-Driven Continuum Robots With Extensible Sections-A Model-Based Evaluation of Path-Following Motionsmuhammed inzamamNo ratings yet
- Study On Fluidic Thrust Vectoring Techniques For Application in V/STOL AircraftsDocument10 pagesStudy On Fluidic Thrust Vectoring Techniques For Application in V/STOL AircraftsAko3871No ratings yet
- Ravikumar 2020 IOP Conf. Ser. Mater. Sci. Eng. 988 012043Document15 pagesRavikumar 2020 IOP Conf. Ser. Mater. Sci. Eng. 988 012043ko koNo ratings yet
- art3A10.10072Fs12239 017 0070 0Document13 pagesart3A10.10072Fs12239 017 0070 0Phuc NguyenNo ratings yet
- Development of Four Bar MechanismDocument7 pagesDevelopment of Four Bar MechanismDbz BoleroNo ratings yet
- Residual Life Prediction and Optimal Maintenance Decision for a Piece of EquipmentFrom EverandResidual Life Prediction and Optimal Maintenance Decision for a Piece of EquipmentNo ratings yet
- 1371 List of CodesDocument296 pages1371 List of CodesFerfer BarbarNo ratings yet
- Aircat Vessels LTD.: Ajeltake Road, Ajeltake Island, Majuro, Marshall Islands MH96960 Reg. No. 100813Document1 pageAircat Vessels LTD.: Ajeltake Road, Ajeltake Island, Majuro, Marshall Islands MH96960 Reg. No. 100813Ferfer BarbarNo ratings yet
- Lesson 3 Ply-Based ProcessDocument42 pagesLesson 3 Ply-Based ProcessFerfer BarbarNo ratings yet
- Acb 531 SeriesDocument28 pagesAcb 531 SeriesFerfer BarbarNo ratings yet
- Master of Science Course in Yacht DesignDocument100 pagesMaster of Science Course in Yacht DesignFerfer BarbarNo ratings yet
- Annex 16 RESOLUTION MEPC.195 (61) Adopted On 1 October 2010 2010 Guidelines For Survey and Certification of Anti-Fouling Systems On ShipsDocument8 pagesAnnex 16 RESOLUTION MEPC.195 (61) Adopted On 1 October 2010 2010 Guidelines For Survey and Certification of Anti-Fouling Systems On ShipsFerfer BarbarNo ratings yet
- International Convention On Limitation of Liability For Maritime Claims (LLMC 1976)Document13 pagesInternational Convention On Limitation of Liability For Maritime Claims (LLMC 1976)Ferfer BarbarNo ratings yet
- Other Products & Services: in A Few Words, Our Vessels AreDocument1 pageOther Products & Services: in A Few Words, Our Vessels AreFerfer BarbarNo ratings yet
- Comfort: The New Generation of High-Speed VesselsDocument1 pageComfort: The New Generation of High-Speed VesselsFerfer BarbarNo ratings yet
- Specifics of Our Vessels: Simple Concept For A Better EfficiencyDocument1 pageSpecifics of Our Vessels: Simple Concept For A Better EfficiencyFerfer BarbarNo ratings yet
- Improved Reliability: The New Generation of High-Speed VesselsDocument1 pageImproved Reliability: The New Generation of High-Speed VesselsFerfer BarbarNo ratings yet
- Aircat VesselsDocument1 pageAircat VesselsFerfer BarbarNo ratings yet
- Maintaining Position During Transfers: Air-Cushion Pressure Controls An Active Motion Damping BehaviorDocument1 pageMaintaining Position During Transfers: Air-Cushion Pressure Controls An Active Motion Damping BehaviorFerfer BarbarNo ratings yet
- Aircat VesselsDocument1 pageAircat VesselsFerfer BarbarNo ratings yet
- Why The Surface Effect Ships (Ses) Technology ?: The New Generation of High-Speed VesselsDocument1 pageWhy The Surface Effect Ships (Ses) Technology ?: The New Generation of High-Speed VesselsFerfer BarbarNo ratings yet
- The New Generation of High-Speed Vessels: Designed To Serve The Energy IndustryDocument12 pagesThe New Generation of High-Speed Vessels: Designed To Serve The Energy IndustryFerfer BarbarNo ratings yet
- Aircat VesselsDocument1 pageAircat VesselsFerfer BarbarNo ratings yet
- Construction Regulations For Light HovercraftDocument28 pagesConstruction Regulations For Light HovercraftFerfer BarbarNo ratings yet
- Process Management of Adhesive Bonding in Rail Vehicle ConstructionDocument20 pagesProcess Management of Adhesive Bonding in Rail Vehicle ConstructionFerfer BarbarNo ratings yet
- FrictionDocument3 pagesFrictionSoumitraBagNo ratings yet
- TKBT Anchor EquipmentDocument32 pagesTKBT Anchor EquipmentLuca Brandi100% (1)
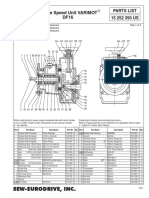
- Variable Speed Unit VARIMOT DF16: Sew-Eurodrive, IncDocument2 pagesVariable Speed Unit VARIMOT DF16: Sew-Eurodrive, Inccarlos aguileraNo ratings yet
- C - TurretDocument25 pagesC - TurretNathan BukoskiNo ratings yet
- ICE Plant Schedule of LoadsDocument6 pagesICE Plant Schedule of LoadsClifford GatonNo ratings yet
- GE Industrial Systems - Vertical Induction MotorsDocument29 pagesGE Industrial Systems - Vertical Induction MotorslcgovpeNo ratings yet
- Laporan Breakdown 28 Maret 2020Document1 pageLaporan Breakdown 28 Maret 2020Rheza IslamsyahNo ratings yet
- Soalan Test 1 20122013 2Document3 pagesSoalan Test 1 20122013 2Suchi Suchi SuchiNo ratings yet
- Dongfeng 8x4 BrosurDocument2 pagesDongfeng 8x4 BrosurRey DoomNo ratings yet
- Project Standards and Specifications Steam Jacketing of Piping Rev01Document4 pagesProject Standards and Specifications Steam Jacketing of Piping Rev01Vijay AnandNo ratings yet
- Concrete Slab Design Using Mathcad PDFDocument7 pagesConcrete Slab Design Using Mathcad PDFDiaconu SofiaNo ratings yet
- Section 5 D6022682 Common Plumbing ProcessesDocument102 pagesSection 5 D6022682 Common Plumbing ProcessesJulianNo ratings yet
- Quiz 49Document5 pagesQuiz 49Niño YbañezNo ratings yet
- CER133.1 - Modulus of Rupture Concepts (Manuscript) - Jimenez&OrdejanDocument8 pagesCER133.1 - Modulus of Rupture Concepts (Manuscript) - Jimenez&OrdejanShara Rose OrdejanNo ratings yet
- Eagle Hydraulic Cylinders - HBU - 2015Document5 pagesEagle Hydraulic Cylinders - HBU - 2015LJavierTaipeNo ratings yet
- Conservation of MomentumDocument21 pagesConservation of Momentumapi-285179261100% (3)
- DTC P1739: Problem in 3rd Clutch Pressure Switch CircuitDocument3 pagesDTC P1739: Problem in 3rd Clutch Pressure Switch Circuitkeck_scribdNo ratings yet
- An Evaluation of The Crack Growth and Fracture Properties of AISI 403 Stainless SteelDocument18 pagesAn Evaluation of The Crack Growth and Fracture Properties of AISI 403 Stainless SteelRodrigo MarinNo ratings yet
- Power Drive: Gesellschaft Fuer Wissenschaftlichen Apparatebau Gesellschaft Fuer Wissenschaftlichen ApparatebauDocument2 pagesPower Drive: Gesellschaft Fuer Wissenschaftlichen Apparatebau Gesellschaft Fuer Wissenschaftlichen ApparatebauGomez, Francisco (AJR)No ratings yet
- UNIVERSAL BEAMS: Dimensions and Properties: Second Moment of Area Radius of Gyration Elastic Modulus Plastic ModulusDocument1 pageUNIVERSAL BEAMS: Dimensions and Properties: Second Moment of Area Radius of Gyration Elastic Modulus Plastic ModulusSri KayNo ratings yet
- Determination of Mohr Cou Lombs Hear Strength ParametersDocument8 pagesDetermination of Mohr Cou Lombs Hear Strength ParametersSammy Davis Lucano PoloNo ratings yet
- Fujitsu Air Conditioning Pricelist 2010Document44 pagesFujitsu Air Conditioning Pricelist 2010adnannsaNo ratings yet
- Microsoft Word Chapter5Document14 pagesMicrosoft Word Chapter5Luis AndersonNo ratings yet
- Vectors and Two-Dimensional MotionDocument45 pagesVectors and Two-Dimensional MotionPHAKVISETH PEMNo ratings yet
- Performance of Gas Turbine EngineDocument35 pagesPerformance of Gas Turbine EngineKusmaliah Oksa100% (1)
- Is Iso 7396 2 2007Document51 pagesIs Iso 7396 2 2007Alemán Jonatan100% (1)