
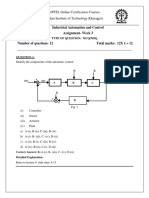
Controllers
Controllers
You might also like
- Experiment - 5: Temperature Control in A Mixing-Heating ProcessDocument13 pagesExperiment - 5: Temperature Control in A Mixing-Heating ProcessKalepu Navya ManishaNo ratings yet
- Solution of Chapter 01 of Modern PhysicsDocument14 pagesSolution of Chapter 01 of Modern PhysicsHamza Hanif100% (1)
- Additional For CH.1Document13 pagesAdditional For CH.1majedmorshed25No ratings yet
- Assignment 3 SolutionsDocument8 pagesAssignment 3 SolutionsAbhishek KumarNo ratings yet
- 03 Application of ODEDocument9 pages03 Application of ODEBeing SAPNILNo ratings yet
- Fund A MentosDocument1 pageFund A MentosSebastian Ospína LópezNo ratings yet
- Assignment 1 - Engineering Measurement-Anandababu NDocument14 pagesAssignment 1 - Engineering Measurement-Anandababu NAnandababu67% (3)
- ReportDocument3 pagesReportAzhar IqbalNo ratings yet
- Assignment 1 Engineering Measurement Anandababu N PDFDocument14 pagesAssignment 1 Engineering Measurement Anandababu N PDFEdwin Yugcha100% (1)
- I I Ref RefDocument6 pagesI I Ref RefAbdul HarisNo ratings yet
- Tut 1Document2 pagesTut 1DECENT DECENT MUSINAINo ratings yet
- Managerial Economics: Question No 1Document5 pagesManagerial Economics: Question No 1Mohsin BashirNo ratings yet
- Lecture03 8thjan2010Document13 pagesLecture03 8thjan2010mibrahim0295No ratings yet
- EC744 Lecture Note 1: Prof. Jianjun MiaoDocument18 pagesEC744 Lecture Note 1: Prof. Jianjun MiaobinicleNo ratings yet
- (Download PDF) Process Systems Analysis and Control 3rd Edition Coughanowr Solutions Manual Full ChapterDocument39 pages(Download PDF) Process Systems Analysis and Control 3rd Edition Coughanowr Solutions Manual Full Chapterroychepachii100% (6)
- Chap 11 (Heat)Document111 pagesChap 11 (Heat)sqamar68No ratings yet
- Stirred Tank HeaterDocument34 pagesStirred Tank HeaterIman Haerudin100% (1)
- Chapter 3Document18 pagesChapter 3Muhd RzwanNo ratings yet
- EMG2410 Tutorial1Document2 pagesEMG2410 Tutorial1DECENT DECENT MUSINAINo ratings yet
- EG55P7 Tutorial 01 SolutionsDocument7 pagesEG55P7 Tutorial 01 SolutionsAndrew RobertsonNo ratings yet
- States of MatterDocument50 pagesStates of Mattershivakafle039No ratings yet
- A Thermometer Which Has Been at The Reading of 70°Document1 pageA Thermometer Which Has Been at The Reading of 70°Lyrine SarmientoNo ratings yet
- Air Flow System Process Control (DCS)Document8 pagesAir Flow System Process Control (DCS)JoannaJames100% (1)
- Classical Control: Proportional, Integral, Derivative (PID) ControlDocument28 pagesClassical Control: Proportional, Integral, Derivative (PID) ControlAdil KhanNo ratings yet
- Refrigeration System: By: Engr. Yuri G. MellizaDocument47 pagesRefrigeration System: By: Engr. Yuri G. MellizaJohnRay LominoqueNo ratings yet
- Pc7 Air FlowDocument8 pagesPc7 Air FlowNoor FadzleenaNo ratings yet
- Assignment 1 - Engineering Measurement-Anandababu NDocument14 pagesAssignment 1 - Engineering Measurement-Anandababu Nray fiyanNo ratings yet
- NCERT Solutions For Class 11 Physics 15may Chapter 13 Kinetic TheoryDocument15 pagesNCERT Solutions For Class 11 Physics 15may Chapter 13 Kinetic TheoryGSN KISHORENo ratings yet
- 11 85P - DoneDocument1 page11 85P - DonegowthamAG07No ratings yet
- Lecture No.3 Reversed Carnot & Product LoadDocument22 pagesLecture No.3 Reversed Carnot & Product LoadJohn Edriane AlvarezNo ratings yet
- Special Topics of Processes and Production Homework Assignment # 1Document1 pageSpecial Topics of Processes and Production Homework Assignment # 1Chris HeNo ratings yet
- Special Topics of Processes and Production Homework Assignment # 1Document1 pageSpecial Topics of Processes and Production Homework Assignment # 1Chris HeNo ratings yet
- Special Topics of Processes and Production Homework Assignment # 1Document1 pageSpecial Topics of Processes and Production Homework Assignment # 1Roberto CetinaNo ratings yet
- Class Notes 3Document9 pagesClass Notes 3Aitazaz HassanNo ratings yet
- Time Delay SystemsDocument25 pagesTime Delay SystemssumanroyalNo ratings yet
- Field MeasurementsDocument25 pagesField Measurementsrick123No ratings yet
- Exo 19 SeptDocument6 pagesExo 19 Sept957327473No ratings yet
- Chapter 4 One-D Steady State Heat Conduction With Heat GenerationDocument30 pagesChapter 4 One-D Steady State Heat Conduction With Heat GenerationHarry RudiyantoNo ratings yet
- Chapter 03Document61 pagesChapter 03JohnJaye100% (7)
- 1 Ti T 0 de (T) DTDocument1 page1 Ti T 0 de (T) DTUsha RNo ratings yet
- Cycle of ConcentrationDocument2 pagesCycle of ConcentrationdsanandaNo ratings yet
- 1st LawDocument10 pages1st LawAdyant AgrawalNo ratings yet
- Study of P, PD, Pi, Pid Controllers Using Mat LabDocument13 pagesStudy of P, PD, Pi, Pid Controllers Using Mat LabVignesh NagarajanNo ratings yet
- MPE324 3 AC LoadDocument26 pagesMPE324 3 AC LoadAdel AshrafNo ratings yet
- REVIEW FINALDocument36 pagesREVIEW FINALnguyenbaotran241104No ratings yet
- Term 4 - Perpindahan KalorDocument48 pagesTerm 4 - Perpindahan KalorMauhibahYumnaNo ratings yet
- Part I Problems and Solutions: X C X XDocument4 pagesPart I Problems and Solutions: X C X XEliaGrassiNo ratings yet
- AlphaDocument7 pagesAlphaJojenNo ratings yet
- CourseraDocument1 pageCourseraRanjani Amrapali VishwanathNo ratings yet
- Module 2 - CALDocument48 pagesModule 2 - CALjagmalNo ratings yet
- Ideal Gas Law ActivityDocument3 pagesIdeal Gas Law ActivityRodolfo MondragonNo ratings yet
- Chemical KineticsDocument7 pagesChemical Kineticsthinkiit100% (1)
- © Ncert Not To Be Republished: Principle of Mathematical InductionDocument12 pages© Ncert Not To Be Republished: Principle of Mathematical InductionSCReddyNo ratings yet
- Units and Measurement: Chemistry Mrs. CoyleDocument44 pagesUnits and Measurement: Chemistry Mrs. CoyleSujoy SamantaNo ratings yet
- Speed of Sound PressureDocument1 pageSpeed of Sound PressureAlessandro SerafiniNo ratings yet
- Universidad Nacional de Trujillo: Facultad de Ingeniería Escuela de Ingeniería de SistemasDocument6 pagesUniversidad Nacional de Trujillo: Facultad de Ingeniería Escuela de Ingeniería de SistemasDiego MarinoNo ratings yet
- B9769F Excel-Template Natural-Convection Inclined-Plane SiDocument4 pagesB9769F Excel-Template Natural-Convection Inclined-Plane SiErdinc SenmanNo ratings yet
- An Air-Standard Cycle Is Executed in A Closed SysDocument1 pageAn Air-Standard Cycle Is Executed in A Closed SysVincent BaguioNo ratings yet
























































Download as docx, pdf, or txt
You might also like
- Experiment - 5: Temperature Control in A Mixing-Heating ProcessDocument13 pagesExperiment - 5: Temperature Control in A Mixing-Heating ProcessKalepu Navya ManishaNo ratings yet
- Solution of Chapter 01 of Modern PhysicsDocument14 pagesSolution of Chapter 01 of Modern PhysicsHamza Hanif100% (1)
- Additional For CH.1Document13 pagesAdditional For CH.1majedmorshed25No ratings yet
- Assignment 3 SolutionsDocument8 pagesAssignment 3 SolutionsAbhishek KumarNo ratings yet
- 03 Application of ODEDocument9 pages03 Application of ODEBeing SAPNILNo ratings yet
- Fund A MentosDocument1 pageFund A MentosSebastian Ospína LópezNo ratings yet
- Assignment 1 - Engineering Measurement-Anandababu NDocument14 pagesAssignment 1 - Engineering Measurement-Anandababu NAnandababu67% (3)
- ReportDocument3 pagesReportAzhar IqbalNo ratings yet
- Assignment 1 Engineering Measurement Anandababu N PDFDocument14 pagesAssignment 1 Engineering Measurement Anandababu N PDFEdwin Yugcha100% (1)
- I I Ref RefDocument6 pagesI I Ref RefAbdul HarisNo ratings yet
- Tut 1Document2 pagesTut 1DECENT DECENT MUSINAINo ratings yet
- Managerial Economics: Question No 1Document5 pagesManagerial Economics: Question No 1Mohsin BashirNo ratings yet
- Lecture03 8thjan2010Document13 pagesLecture03 8thjan2010mibrahim0295No ratings yet
- EC744 Lecture Note 1: Prof. Jianjun MiaoDocument18 pagesEC744 Lecture Note 1: Prof. Jianjun MiaobinicleNo ratings yet
- (Download PDF) Process Systems Analysis and Control 3rd Edition Coughanowr Solutions Manual Full ChapterDocument39 pages(Download PDF) Process Systems Analysis and Control 3rd Edition Coughanowr Solutions Manual Full Chapterroychepachii100% (6)
- Chap 11 (Heat)Document111 pagesChap 11 (Heat)sqamar68No ratings yet
- Stirred Tank HeaterDocument34 pagesStirred Tank HeaterIman Haerudin100% (1)
- Chapter 3Document18 pagesChapter 3Muhd RzwanNo ratings yet
- EMG2410 Tutorial1Document2 pagesEMG2410 Tutorial1DECENT DECENT MUSINAINo ratings yet
- EG55P7 Tutorial 01 SolutionsDocument7 pagesEG55P7 Tutorial 01 SolutionsAndrew RobertsonNo ratings yet
- States of MatterDocument50 pagesStates of Mattershivakafle039No ratings yet
- A Thermometer Which Has Been at The Reading of 70°Document1 pageA Thermometer Which Has Been at The Reading of 70°Lyrine SarmientoNo ratings yet
- Air Flow System Process Control (DCS)Document8 pagesAir Flow System Process Control (DCS)JoannaJames100% (1)
- Classical Control: Proportional, Integral, Derivative (PID) ControlDocument28 pagesClassical Control: Proportional, Integral, Derivative (PID) ControlAdil KhanNo ratings yet
- Refrigeration System: By: Engr. Yuri G. MellizaDocument47 pagesRefrigeration System: By: Engr. Yuri G. MellizaJohnRay LominoqueNo ratings yet
- Pc7 Air FlowDocument8 pagesPc7 Air FlowNoor FadzleenaNo ratings yet
- Assignment 1 - Engineering Measurement-Anandababu NDocument14 pagesAssignment 1 - Engineering Measurement-Anandababu Nray fiyanNo ratings yet
- NCERT Solutions For Class 11 Physics 15may Chapter 13 Kinetic TheoryDocument15 pagesNCERT Solutions For Class 11 Physics 15may Chapter 13 Kinetic TheoryGSN KISHORENo ratings yet
- 11 85P - DoneDocument1 page11 85P - DonegowthamAG07No ratings yet
- Lecture No.3 Reversed Carnot & Product LoadDocument22 pagesLecture No.3 Reversed Carnot & Product LoadJohn Edriane AlvarezNo ratings yet
- Special Topics of Processes and Production Homework Assignment # 1Document1 pageSpecial Topics of Processes and Production Homework Assignment # 1Chris HeNo ratings yet
- Special Topics of Processes and Production Homework Assignment # 1Document1 pageSpecial Topics of Processes and Production Homework Assignment # 1Chris HeNo ratings yet
- Special Topics of Processes and Production Homework Assignment # 1Document1 pageSpecial Topics of Processes and Production Homework Assignment # 1Roberto CetinaNo ratings yet
- Class Notes 3Document9 pagesClass Notes 3Aitazaz HassanNo ratings yet
- Time Delay SystemsDocument25 pagesTime Delay SystemssumanroyalNo ratings yet
- Field MeasurementsDocument25 pagesField Measurementsrick123No ratings yet
- Exo 19 SeptDocument6 pagesExo 19 Sept957327473No ratings yet
- Chapter 4 One-D Steady State Heat Conduction With Heat GenerationDocument30 pagesChapter 4 One-D Steady State Heat Conduction With Heat GenerationHarry RudiyantoNo ratings yet
- Chapter 03Document61 pagesChapter 03JohnJaye100% (7)
- 1 Ti T 0 de (T) DTDocument1 page1 Ti T 0 de (T) DTUsha RNo ratings yet
- Cycle of ConcentrationDocument2 pagesCycle of ConcentrationdsanandaNo ratings yet
- 1st LawDocument10 pages1st LawAdyant AgrawalNo ratings yet
- Study of P, PD, Pi, Pid Controllers Using Mat LabDocument13 pagesStudy of P, PD, Pi, Pid Controllers Using Mat LabVignesh NagarajanNo ratings yet
- MPE324 3 AC LoadDocument26 pagesMPE324 3 AC LoadAdel AshrafNo ratings yet
- REVIEW FINALDocument36 pagesREVIEW FINALnguyenbaotran241104No ratings yet
- Term 4 - Perpindahan KalorDocument48 pagesTerm 4 - Perpindahan KalorMauhibahYumnaNo ratings yet
- Part I Problems and Solutions: X C X XDocument4 pagesPart I Problems and Solutions: X C X XEliaGrassiNo ratings yet
- AlphaDocument7 pagesAlphaJojenNo ratings yet
- CourseraDocument1 pageCourseraRanjani Amrapali VishwanathNo ratings yet
- Module 2 - CALDocument48 pagesModule 2 - CALjagmalNo ratings yet
- Ideal Gas Law ActivityDocument3 pagesIdeal Gas Law ActivityRodolfo MondragonNo ratings yet
- Chemical KineticsDocument7 pagesChemical Kineticsthinkiit100% (1)
- © Ncert Not To Be Republished: Principle of Mathematical InductionDocument12 pages© Ncert Not To Be Republished: Principle of Mathematical InductionSCReddyNo ratings yet
- Units and Measurement: Chemistry Mrs. CoyleDocument44 pagesUnits and Measurement: Chemistry Mrs. CoyleSujoy SamantaNo ratings yet
- Speed of Sound PressureDocument1 pageSpeed of Sound PressureAlessandro SerafiniNo ratings yet
- Universidad Nacional de Trujillo: Facultad de Ingeniería Escuela de Ingeniería de SistemasDocument6 pagesUniversidad Nacional de Trujillo: Facultad de Ingeniería Escuela de Ingeniería de SistemasDiego MarinoNo ratings yet
- B9769F Excel-Template Natural-Convection Inclined-Plane SiDocument4 pagesB9769F Excel-Template Natural-Convection Inclined-Plane SiErdinc SenmanNo ratings yet
- An Air-Standard Cycle Is Executed in A Closed SysDocument1 pageAn Air-Standard Cycle Is Executed in A Closed SysVincent BaguioNo ratings yet