Download as pdf or txt
You might also like
- Schneider Wiring Diagram BookDocument109 pagesSchneider Wiring Diagram BooktanveerNo ratings yet
- 8 - Operating Instruction - Control Card RK 4004 - BEA - 250482-En-14Document66 pages8 - Operating Instruction - Control Card RK 4004 - BEA - 250482-En-14jose mondaca0% (1)
- Proportianal Valve CatheadDocument4 pagesProportianal Valve CatheadcarlosorizabaNo ratings yet
- Datasheet ACTUATORDocument4 pagesDatasheet ACTUATORRahul KothiyalNo ratings yet
- Proact™ Analog And: Digital PlusDocument4 pagesProact™ Analog And: Digital PlusNoman MasoodNo ratings yet
- Industrial Servo DrivesDocument6 pagesIndustrial Servo DrivesKornélIllyésNo ratings yet
- Proact™ Analog & Digital Plus: ApplicationsDocument4 pagesProact™ Analog & Digital Plus: ApplicationsStathis MoumousisNo ratings yet
- Erhardt + Leimer DC5500 Digital ControllerDocument64 pagesErhardt + Leimer DC5500 Digital ControllerUlises PCNo ratings yet
- Datasheet VertexRSI Antenna Control System Type 7134Document4 pagesDatasheet VertexRSI Antenna Control System Type 7134Jawad MalikNo ratings yet
- Digital Position Controllers Z-Ri-Tez, Z-Ri-LezDocument8 pagesDigital Position Controllers Z-Ri-Tez, Z-Ri-Lezkaniappan sakthivelNo ratings yet
- Lecture 1Document20 pagesLecture 1Efaz AfnanNo ratings yet
- Fire Pump ControllerDocument2 pagesFire Pump Controllerjoaofelipe.msNo ratings yet
- 2014 10 09 17 06 Pid-Control-BrochureDocument7 pages2014 10 09 17 06 Pid-Control-Brochureardi firmansyahNo ratings yet
- 1771 QBDocument16 pages1771 QBtt cheneyNo ratings yet
- Hardware in The Loop For Electronic Throttle System Identification and ControlDocument21 pagesHardware in The Loop For Electronic Throttle System Identification and ControldardoNo ratings yet
- InteliATS NT - Datasheet 2011-03Document4 pagesInteliATS NT - Datasheet 2011-03Clarice Alves de FreitasNo ratings yet
- Soft Servo Glossary: For Servoworks CNC Products and SMP Series General Motion Control ProductsDocument32 pagesSoft Servo Glossary: For Servoworks CNC Products and SMP Series General Motion Control Productsعبد الكريم ملوحNo ratings yet
- MODEL 7134: Antenna Control SystemDocument4 pagesMODEL 7134: Antenna Control SystemMemoPalacioNo ratings yet
- PCEC Elevator SoftstartersDocument15 pagesPCEC Elevator Softstarterszkd77No ratings yet
- Placa E+lDocument68 pagesPlaca E+lcarlos eduardo100% (1)
- PCC3201 S-1444Document9 pagesPCC3201 S-1444homayoun khosravaniNo ratings yet
- Automatic / Manual Start Unit For Gen-Sets: Provides Flexible Start and Control Functions For Diesel GeneratorsDocument2 pagesAutomatic / Manual Start Unit For Gen-Sets: Provides Flexible Start and Control Functions For Diesel GeneratorsSiding BarroNo ratings yet
- Intelidrive Lite FPC 2014-12 CplefpcDocument2 pagesIntelidrive Lite FPC 2014-12 CplefpcalstomNo ratings yet
- L2-enDocument26 pagesL2-endovamidocs.ntu.stuNo ratings yet
- Proact™ P-Series Position Controller: ApplicationsDocument5 pagesProact™ P-Series Position Controller: Applicationschao wangNo ratings yet
- Pub146 004 00 - 0218 PDFDocument10 pagesPub146 004 00 - 0218 PDFKamel HannachiNo ratings yet
- AGC 150 Product Sheet 4189341187 UK PDFDocument4 pagesAGC 150 Product Sheet 4189341187 UK PDFLwin PhyoNo ratings yet
- SERIES E1200: Edition 24 Subject To AlterationsDocument19 pagesSERIES E1200: Edition 24 Subject To Alterationsoctavinavarro8236No ratings yet
- Proportional Directional Valves DHZO-A and DKZOR-ADocument8 pagesProportional Directional Valves DHZO-A and DKZOR-ASzilárd SNo ratings yet
- PCC 3201Document9 pagesPCC 3201386No ratings yet
- Delta CNC Controller For Turning Milling Boring MachinesDocument8 pagesDelta CNC Controller For Turning Milling Boring MachinesKAIDEARNo ratings yet
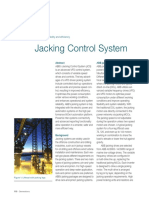
- Abb Jacking ControlDocument4 pagesAbb Jacking ControlAleksey Bondar100% (1)
- 10 - Chapter 6Document35 pages10 - Chapter 6Debayanbasu.juNo ratings yet
- Operating Manual: en Digital Web Guider WSSDocument20 pagesOperating Manual: en Digital Web Guider WSSSrimannarayana NandamNo ratings yet
- vc34 Kompend Kap01 eDocument4 pagesvc34 Kompend Kap01 eSafetyjoe2No ratings yet
- Type KAVS: Check Synchronizing RelayDocument8 pagesType KAVS: Check Synchronizing RelayPanu Mark IINo ratings yet
- KAVS100Document8 pagesKAVS100ramesheee1986No ratings yet
- Description J: Software: RK 4004-0003 F - ZGDocument62 pagesDescription J: Software: RK 4004-0003 F - ZGRafael DavidNo ratings yet
- CS Exp 5Document4 pagesCS Exp 5D StudiosNo ratings yet
- Bea 250482 en 07Document64 pagesBea 250482 en 07tanzan8No ratings yet
- GRADE-10 TLE Electronic Products Assembly and Servicing Week OneDocument6 pagesGRADE-10 TLE Electronic Products Assembly and Servicing Week OneSer TakeshiNo ratings yet
- SGDV Servopack PDFDocument398 pagesSGDV Servopack PDFMuryadi100% (1)
- Modeling A Controller For An Articulated Robotic ADocument4 pagesModeling A Controller For An Articulated Robotic Ayugioh beeNo ratings yet
- Woodward EPG Actuator Governor SystemsDocument4 pagesWoodward EPG Actuator Governor SystemsAbdo EchchiguerNo ratings yet
- Machine Test System BrochureDocument8 pagesMachine Test System BrochureAhmet GumusNo ratings yet
- 207 00 Analog and Digital Motor Control Teaching SetDocument2 pages207 00 Analog and Digital Motor Control Teaching SetDavid de Almeida FiorilloNo ratings yet
- Bea 250482 en 05 RK4004Document64 pagesBea 250482 en 05 RK4004CORTOCIRCUITANTENo ratings yet
- A Controller Design For Servo Control System Using Different TechniquesDocument8 pagesA Controller Design For Servo Control System Using Different TechniquesKOKONo ratings yet
- SECTION 5.00: Speed Governing SystemDocument40 pagesSECTION 5.00: Speed Governing SystemLUISA FERNANDA TORRES MANOSALVANo ratings yet
- Agc From EtapDocument8 pagesAgc From EtapKiran KarthikNo ratings yet
- Decentralised Inverters Control Cyclic Operation and PositioningDocument8 pagesDecentralised Inverters Control Cyclic Operation and PositioningAnıl YavuzNo ratings yet
- Hydro Power Governor BrochureDocument8 pagesHydro Power Governor BrochureTitipong PulbunrojNo ratings yet
- As 16288 TG 600229 WW GB 0128 2Document16 pagesAs 16288 TG 600229 WW GB 0128 2hyviet1357No ratings yet
- Powercommand: Genset ControlsDocument9 pagesPowercommand: Genset Controlschock channel 19No ratings yet
- Numerical Control of Machine Tools (DE) ME453 Unit 2Document150 pagesNumerical Control of Machine Tools (DE) ME453 Unit 2DilipNo ratings yet
- Datum Electronics: Pto 420 Series Shaft Torque & Power Monitoring System Handbook and Installation GuideDocument6 pagesDatum Electronics: Pto 420 Series Shaft Torque & Power Monitoring System Handbook and Installation Guidehechano2No ratings yet
- Agc 150 Product Sheet 4189341187 UkDocument4 pagesAgc 150 Product Sheet 4189341187 UkMARIO ORTIZNo ratings yet
- Robust Speed-Controlled IM Drive Using EKF and RLS EstimatorsDocument7 pagesRobust Speed-Controlled IM Drive Using EKF and RLS Estimatorssajs201100% (1)
- Operating Manual: en Digital Web Guider WSSDocument24 pagesOperating Manual: en Digital Web Guider WSSwagnerNo ratings yet
- General Information: HandsetDocument17 pagesGeneral Information: HandsetChristian BedoyaNo ratings yet
- Digital Electronic Drivers E-Bm-As: DIN-rail Panel Format, For Proportional Valves Without TransducerDocument4 pagesDigital Electronic Drivers E-Bm-As: DIN-rail Panel Format, For Proportional Valves Without TransducerManzoor-ul- HassanNo ratings yet
- 34 Xy 25 04Document54 pages34 Xy 25 04Manzoor-ul- HassanNo ratings yet
- 34 Xy 25 01Document43 pages34 Xy 25 01Manzoor-ul- HassanNo ratings yet
- 34 Xy 03 57Document8 pages34 Xy 03 57Manzoor-ul- HassanNo ratings yet
- 34 Xy 03 08Document5 pages34 Xy 03 08Manzoor-ul- HassanNo ratings yet
- Opsis O2000.enDocument4 pagesOpsis O2000.enManzoor-ul- HassanNo ratings yet
- 34 Xy 03 04Document6 pages34 Xy 03 04Manzoor-ul- HassanNo ratings yet
- Foxboro RTT 20Document16 pagesFoxboro RTT 20Manzoor-ul- HassanNo ratings yet
- 405 DatasheetDocument4 pages405 DatasheetManzoor-ul- HassanNo ratings yet
- Flow Computer Model 405A: 405A-M-V3 Sep 2013Document44 pagesFlow Computer Model 405A: 405A-M-V3 Sep 2013Manzoor-ul- HassanNo ratings yet
- Flow Cell-DKDocument6 pagesFlow Cell-DKManzoor-ul- HassanNo ratings yet
- 34 ST 11 30Document36 pages34 ST 11 30Manzoor-ul- HassanNo ratings yet
- 34 ST 25 07aDocument34 pages34 ST 25 07aManzoor-ul- HassanNo ratings yet
- 34 ST 11 21Document36 pages34 ST 11 21Manzoor-ul- HassanNo ratings yet
- 34 ST 11 15Document13 pages34 ST 11 15Manzoor-ul- HassanNo ratings yet
- 34 ST 03 65Document14 pages34 ST 03 65Manzoor-ul- HassanNo ratings yet
- DeviceNet BrochureDocument251 pagesDeviceNet BrochureabufaruqiNo ratings yet
- Communication System Block Diagram PDFDocument2 pagesCommunication System Block Diagram PDFVanessaNo ratings yet
- A Walk Through The MSA Software Spectrum Analyzer ModeDocument9 pagesA Walk Through The MSA Software Spectrum Analyzer ModeCristi FilipNo ratings yet
- Mis 6th Edition Bidgoli Solutions ManualDocument35 pagesMis 6th Edition Bidgoli Solutions Manualepulotictomaleyrakqbs100% (35)
- Mechanical Temperature Switches: Connector Bayonet According DIN 72585Document1 pageMechanical Temperature Switches: Connector Bayonet According DIN 72585stodzathegreatNo ratings yet
- SM4001 AiTComponentsDocument5 pagesSM4001 AiTComponentsjulio cubillaNo ratings yet
- Service Manual: KDL-52V4100 KDL-52V4100 KDL-52W4100 KDL-52W4100Document114 pagesService Manual: KDL-52V4100 KDL-52V4100 KDL-52W4100 KDL-52W4100Carolina López GonzálezNo ratings yet
- Introduction To Circuit Theory: Prepared By: Aaron U. Aquino, EceDocument20 pagesIntroduction To Circuit Theory: Prepared By: Aaron U. Aquino, EceGanmarie DuqueNo ratings yet
- STF13NM60N STMicroelectronics Datasheet 10835784Document30 pagesSTF13NM60N STMicroelectronics Datasheet 10835784Matheus Alves MendesNo ratings yet
- 4.1.01 Schedule of Components: Code Description TotalDocument1 page4.1.01 Schedule of Components: Code Description TotalVinay PallivalppilNo ratings yet
- Sic 9653Document7 pagesSic 9653miria27No ratings yet
- City O2Document8 pagesCity O2hocolonkoNo ratings yet
- FTL33Document36 pagesFTL33EngChengLengNo ratings yet
- Et1000 Installer InstructionsDocument13 pagesEt1000 Installer InstructionsBrendaMeyerNo ratings yet
- Jensen CDR5620 Installation & Owner's Manual enDocument22 pagesJensen CDR5620 Installation & Owner's Manual enJohn WalesNo ratings yet
- 11 CSS Module Week 3Document23 pages11 CSS Module Week 3Alexander IbarretaNo ratings yet
- Schematic - SPY Camera TransmeterDocument1 pageSchematic - SPY Camera TransmeterSami AslamNo ratings yet
- C37.59 Standard Requirements For Conversion of Power Switchgear EquipmentDocument23 pagesC37.59 Standard Requirements For Conversion of Power Switchgear EquipmentJulian AngeloNo ratings yet
- MAX6956 Programming GuideDocument5 pagesMAX6956 Programming GuideJonathan JaegerNo ratings yet
- Fast Frequency Response From Smart Induction Motor Variable Speed DrivesDocument11 pagesFast Frequency Response From Smart Induction Motor Variable Speed DrivesAravind SNo ratings yet
- MotorsDocument16 pagesMotorsHassan Iftekhar AhmedNo ratings yet
- Unit 2Document15 pagesUnit 2Abishek NeupaneNo ratings yet
- Amot 8071A Thermocontroller PDFDocument14 pagesAmot 8071A Thermocontroller PDFИван ПарлапановNo ratings yet
- (300MB To 700MB) All Old N New Bengali Movies in PDVD - Amader Forum - We Lead & Others FollowDocument7 pages(300MB To 700MB) All Old N New Bengali Movies in PDVD - Amader Forum - We Lead & Others FollowUdoy Paul0% (1)
- Relay Identification: Example CDG31FF002SACHDocument5 pagesRelay Identification: Example CDG31FF002SACHRohit RanaNo ratings yet
- Operation/Technical Manual: Full Digital Ultrasonic Diagnostic SystemDocument75 pagesOperation/Technical Manual: Full Digital Ultrasonic Diagnostic SystemBilal AloulouNo ratings yet
- Introduction To VHDL: Boumerdes UniversityDocument6 pagesIntroduction To VHDL: Boumerdes UniversityTi NaNo ratings yet
- 750-392-Cbex-De10 OkDocument124 pages750-392-Cbex-De10 OkPedro RojasNo ratings yet
- Liberacion Ziezamovil 2010Document5 pagesLiberacion Ziezamovil 2010santiagpyepezNo ratings yet