Download as docx, pdf, or txt
You might also like
- Home Automation Using Internet of Things PDFDocument10 pagesHome Automation Using Internet of Things PDFSúrýà Vãmshì100% (1)
- Batch 56Document71 pagesBatch 56dindugovindrajNo ratings yet
- Merged MergedDocument93 pagesMerged MergedharshiharshieNo ratings yet
- Implementation of A Child Rescue System From BorewellDocument8 pagesImplementation of A Child Rescue System From BorewellaavulaganeshcseNo ratings yet
- Footstep VenkiDocument41 pagesFootstep Venkikarri GaneshNo ratings yet
- Sathyabama: Institute of Science and Technology (Deemed To Be University)Document69 pagesSathyabama: Institute of Science and Technology (Deemed To Be University)ted gcgdNo ratings yet
- Smart Hand Report FrontDocument8 pagesSmart Hand Report Frontproxyone taskNo ratings yet
- Real Time Water Quality Monitoring Through IotDocument71 pagesReal Time Water Quality Monitoring Through IotPeter MulengaNo ratings yet
- Document Doppler EffectDocument40 pagesDocument Doppler EffectKARNAKANTOJU ABHIRAMNo ratings yet
- Akula PravaliDocument50 pagesAkula PravaliSIRI NETNo ratings yet
- Visvesvaraya Technological University: "Jnana Sangama", Belagavi-590018, KarnatakaDocument21 pagesVisvesvaraya Technological University: "Jnana Sangama", Belagavi-590018, KarnatakaPrajwal GowdaNo ratings yet
- Major Project Final SubmissionDocument52 pagesMajor Project Final SubmissionAqsa KhanNo ratings yet
- PLL AdarshaDocument83 pagesPLL AdarshaDr.Rashmi Seethur ECE Staff ,PESU RR campusNo ratings yet
- Tele-Ecg Monitoring System Using Raspberry Pi: A Project ReportDocument37 pagesTele-Ecg Monitoring System Using Raspberry Pi: A Project Reportdhiwahar cv100% (1)
- Title Page Document FinalDocument11 pagesTitle Page Document Finalpoojitha vadapalliNo ratings yet
- Iot Based Smart Dam Monitoring and Alerting System Using Raspberry PiDocument68 pagesIot Based Smart Dam Monitoring and Alerting System Using Raspberry Pimokshitha pallapoluNo ratings yet
- Automatic Garbage Intimator Final ReportDocument28 pagesAutomatic Garbage Intimator Final ReportPola AshutoshNo ratings yet
- DPV ProjectDocument65 pagesDPV Projectvamshi AkaramNo ratings yet
- Computer Science and Engineering: Bachelor of TechnologyDocument8 pagesComputer Science and Engineering: Bachelor of Technologycity cyberNo ratings yet
- Automatic Table Cleaning RobotDocument39 pagesAutomatic Table Cleaning RobotKartheek BandiNo ratings yet
- Giri Project 1Document81 pagesGiri Project 1Aathi sri s.sNo ratings yet
- Project Report Phase-1 PDFDocument41 pagesProject Report Phase-1 PDFGayathri kNo ratings yet
- Smart Medical Mirror Project RPT - 0Document22 pagesSmart Medical Mirror Project RPT - 0Udhayakumar GNo ratings yet
- Project Report 1,2,3Document6 pagesProject Report 1,2,3SKYWINDURAI RNo ratings yet
- EC Project Report Guidelines 2018-19Document10 pagesEC Project Report Guidelines 2018-19Harry RoyNo ratings yet
- Artificial Intelligence Based Real-Time Attendance System Using Face RecognitionDocument68 pagesArtificial Intelligence Based Real-Time Attendance System Using Face RecognitiongururajNo ratings yet
- Iot Based Multipurpose Agribot Using Sensor: Sridevi Women'S Engineering CollegeDocument68 pagesIot Based Multipurpose Agribot Using Sensor: Sridevi Women'S Engineering Collegesaikrishna645No ratings yet
- Artificial Intelligence Based Real-Time Attendance System Using Face RecognitionDocument66 pagesArtificial Intelligence Based Real-Time Attendance System Using Face RecognitiongururajNo ratings yet
- BindingDocument77 pagesBindingsharma xeroxNo ratings yet
- Floor Cleaning RobotDocument36 pagesFloor Cleaning RobotKumaR techsNo ratings yet
- Uv 3 - MergedDocument71 pagesUv 3 - MergedD RohiniNo ratings yet
- A Mini Project Report 1Document25 pagesA Mini Project Report 1PrasannakumarNo ratings yet
- Project DocumentationDocument42 pagesProject DocumentationRashmitha PatelNo ratings yet
- Intership Final Report (1) (1) (1) Farhan-2 2Document32 pagesIntership Final Report (1) (1) (1) Farhan-2 2Padma Reddy GNo ratings yet
- Project Report SampleDocument51 pagesProject Report SamplesayalitekeNo ratings yet
- Crop Project Report PDFDocument56 pagesCrop Project Report PDFkrishna250602No ratings yet
- Battery Monitoring System For A PV Inverter With Solar TrackingDocument20 pagesBattery Monitoring System For A PV Inverter With Solar TrackingSujithaNo ratings yet
- Miniproject 190515092415 1Document51 pagesMiniproject 190515092415 1GREENY blackyNo ratings yet
- Automatic Irrigation SystemDocument33 pagesAutomatic Irrigation Systemsai saranNo ratings yet
- Tms Documentation PDFDocument34 pagesTms Documentation PDFShivani DevdaNo ratings yet
- Rahul Final PDFDocument77 pagesRahul Final PDFChandolu SaishivaniNo ratings yet
- Project Report 1Document23 pagesProject Report 1tricycle.puneNo ratings yet
- Investigation of Swipt NomaDocument61 pagesInvestigation of Swipt NomakjzbxNo ratings yet
- Floor Cleaning RobotDocument62 pagesFloor Cleaning RobotKumaR techsNo ratings yet
- Project Reportt (Repaired)Document28 pagesProject Reportt (Repaired)Amit ShingadeNo ratings yet
- Drone PDF 5Document26 pagesDrone PDF 5Ali Ahmad AnsariNo ratings yet
- Final ProjectDocument101 pagesFinal ProjectHarish HariNo ratings yet
- Visvesvaraya Technological University Jnana Sangama, Belagavi-590018Document51 pagesVisvesvaraya Technological University Jnana Sangama, Belagavi-590018hamed razaNo ratings yet
- Dual Band MIMO Antenna For 5G Smartphone ApplicationDocument103 pagesDual Band MIMO Antenna For 5G Smartphone Applicationss1976No ratings yet
- MINI ProjectDocument56 pagesMINI ProjectAsheesh KNo ratings yet
- Major FinalDocument22 pagesMajor FinalkonapuramsidhuNo ratings yet
- Quick Services For Airlines Passengers Using Touchscreen and ZigbeeDocument67 pagesQuick Services For Airlines Passengers Using Touchscreen and ZigbeeRajvardhan AvcharNo ratings yet
- Major Project Document PDFDocument74 pagesMajor Project Document PDFPrathyusha Choudary ArumandlaNo ratings yet
- Mjor 2 Lung PDFDocument20 pagesMjor 2 Lung PDFkonapuramsidhuNo ratings yet
- 18HR1A0402 Documentation Wearable BioSensors (1) 1Document25 pages18HR1A0402 Documentation Wearable BioSensors (1) 1PrakashNo ratings yet
- Automated Railway Announcement Using Zigbee ProtocolDocument18 pagesAutomated Railway Announcement Using Zigbee Protocolsree2728No ratings yet
- A Mini Project Report ON: Air Pollution Monitoring System Using LabviewDocument47 pagesA Mini Project Report ON: Air Pollution Monitoring System Using LabviewSaarika VedanshiNo ratings yet
- Iot Based Automatic Critical Health Monitoring System Using Arm - 7Document66 pagesIot Based Automatic Critical Health Monitoring System Using Arm - 7Shekar ReddyNo ratings yet
- Augmenet Reality 1Document75 pagesAugmenet Reality 1Gowthaman PNo ratings yet
- Design and Implementation of Portable Impedance AnalyzersFrom EverandDesign and Implementation of Portable Impedance AnalyzersNo ratings yet
- EECS6895-AdvancedBigDataAnalytics-Lecture6Document81 pagesEECS6895-AdvancedBigDataAnalytics-Lecture6nirajaadithya.dasireddiNo ratings yet
- Foundations of Data Science and Engineering Syllabus Fall 2021 v2Document6 pagesFoundations of Data Science and Engineering Syllabus Fall 2021 v2nirajaadithya.dasireddiNo ratings yet
- Syllabus PDFDocument4 pagesSyllabus PDFXiofiNo ratings yet
- unit 3 prompt engiDocument16 pagesunit 3 prompt enginirajaadithya.dasireddiNo ratings yet
- Practice Notes for PysparkDocument42 pagesPractice Notes for Pysparknirajaadithya.dasireddiNo ratings yet
- Structure of Convolutional Neural Networks - Deep LearningDocument12 pagesStructure of Convolutional Neural Networks - Deep Learningnirajaadithya.dasireddiNo ratings yet
- Aws Cloud & DevOps Engineer - Interview QuestionsDocument4 pagesAws Cloud & DevOps Engineer - Interview Questionsnirajaadithya.dasireddiNo ratings yet
- Artificial Intelligence Learning Through Interactions and Big DataDocument6 pagesArtificial Intelligence Learning Through Interactions and Big Datanirajaadithya.dasireddiNo ratings yet
- How To Use Mitre Att CK in SocDocument4 pagesHow To Use Mitre Att CK in SocOLIVER CHINCHILLA ARIZANo ratings yet
- Pgp-Machine-Learning-Brochure by Sky Lake CollegeDocument13 pagesPgp-Machine-Learning-Brochure by Sky Lake Collegenirajaadithya.dasireddiNo ratings yet
- A Novel Distance Estimation Method Leading A Forward Collision ADocument13 pagesA Novel Distance Estimation Method Leading A Forward Collision Anirajaadithya.dasireddiNo ratings yet
- The Contemporary World ModuleDocument131 pagesThe Contemporary World ModuleJay Vincent AmoloNo ratings yet
- Silicon NPN Triple Diffused: ApplicationDocument6 pagesSilicon NPN Triple Diffused: ApplicationDidi ConanNo ratings yet
- Lint InterceptorDocument1 pageLint InterceptorAdnan Ahmed KidwaiNo ratings yet
- Board of Secondary Education, Madhya Pradesh - Examination Results 2018 - HSSC RWL PDFDocument1 pageBoard of Secondary Education, Madhya Pradesh - Examination Results 2018 - HSSC RWL PDFEX DEPTT ASCTNo ratings yet
- MCW!!!Document9 pagesMCW!!!badshahsaadNo ratings yet
- Industry Decanter Centrifuge: Hebei GN Solids Control Co.,LtdDocument16 pagesIndustry Decanter Centrifuge: Hebei GN Solids Control Co.,LtdlauNo ratings yet
- Context, Dexis, ReferenceDocument8 pagesContext, Dexis, ReferenceTrang HoàngNo ratings yet
- Call of Duty Mobile: Rules & RegulationsDocument4 pagesCall of Duty Mobile: Rules & RegulationsNazrin SalehNo ratings yet
- Narrative Report On Trainings Attended by SUpervsisorDocument5 pagesNarrative Report On Trainings Attended by SUpervsisorDebz CayNo ratings yet
- Liquid Ow in Polyurethane Foams For Filtration Applications: A Study On Their Characterization and Permeability EstimationDocument14 pagesLiquid Ow in Polyurethane Foams For Filtration Applications: A Study On Their Characterization and Permeability EstimationEstefania VillamarinNo ratings yet
- Haskell Ebook ReaderDocument1,610 pagesHaskell Ebook ReaderhoogggleeeNo ratings yet
- Blue Modern Universe Desktop WallpaperDocument21 pagesBlue Modern Universe Desktop Wallpapercami santosNo ratings yet
- Homelite XL 12Document21 pagesHomelite XL 12Alberto LazzarinNo ratings yet
- DiffractionDocument14 pagesDiffractionYogendra KshetriNo ratings yet
- Earthing System Design - Moving From Worst Case To The Big Picture PDFDocument10 pagesEarthing System Design - Moving From Worst Case To The Big Picture PDFHung nguyen manhNo ratings yet
- Q3 ENGLISH 1 Week 5Document8 pagesQ3 ENGLISH 1 Week 5Ailyn Valenzuela CapellanNo ratings yet
- Packing Type in Hysys 9Document11 pagesPacking Type in Hysys 9Mahdi koolivandNo ratings yet
- Energiaelosztok - Energy Distributors MixvillDocument65 pagesEnergiaelosztok - Energy Distributors MixvillJózsef VidaNo ratings yet
- ConvertWithMoss ManualDocument13 pagesConvertWithMoss ManualFrançois ClamourNo ratings yet
- Final Report PlacementDocument14 pagesFinal Report PlacementAndrei-Bogdan PuiuNo ratings yet
- Casing Centralizer Are We Using Too Many or Too FewDocument19 pagesCasing Centralizer Are We Using Too Many or Too FewbeiguiiuirrNo ratings yet
- Maharshi Aravabhoomi ResumeDocument2 pagesMaharshi Aravabhoomi Resumedvinodkumarreddy2No ratings yet
- Antaki Social Identities in TalkDocument20 pagesAntaki Social Identities in TalkangiebleuNo ratings yet
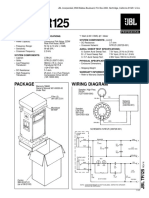
- JBL TR125Document2 pagesJBL TR125Jose Gregorio Ortega CarrilloNo ratings yet
- Trine Natasja Sindahl PSYKphd MAR2019 B5Document169 pagesTrine Natasja Sindahl PSYKphd MAR2019 B5Maira Espinoza LabraNo ratings yet
- Summative Test in Oral Comm Weeks 1-4Document2 pagesSummative Test in Oral Comm Weeks 1-4Joyce NuenaNo ratings yet
- Chivalry of A Failed Knight Vol. 3Document175 pagesChivalry of A Failed Knight Vol. 3SETi2003No ratings yet
- E-Ticket For Gulmarg-Kungdoor (Two Way Ticket) : Important InformationDocument29 pagesE-Ticket For Gulmarg-Kungdoor (Two Way Ticket) : Important InformationykadamNo ratings yet
- Assignment4 Solutions Chap6Document7 pagesAssignment4 Solutions Chap6Mohit soniNo ratings yet
- 14122-1 - Choice of Fixed Means of Access Between Two LevelsDocument20 pages14122-1 - Choice of Fixed Means of Access Between Two Levelsdavid.gonda8No ratings yet