Download as pdf or txt
You might also like
- Crowdnet: A Deep Convolutional Network For Dense Crowd CountingDocument5 pagesCrowdnet: A Deep Convolutional Network For Dense Crowd CountingTayyab MujahidNo ratings yet
- Deep Crowd Counting in Congested Scenes Through Refine ModulesDocument10 pagesDeep Crowd Counting in Congested Scenes Through Refine ModulesDrPoonam SharmaNo ratings yet
- Active Crowd Counting With Limited SupervisionDocument17 pagesActive Crowd Counting With Limited Supervision黃丰楷No ratings yet
- Hu Visualization of Convolutional Neural Networks For Monocular Depth Estimation ICCV 2019 PaperDocument10 pagesHu Visualization of Convolutional Neural Networks For Monocular Depth Estimation ICCV 2019 Papersafae afNo ratings yet
- Coun TRDocument12 pagesCoun TRarjun22_c3794No ratings yet
- ICCV2019 - Bayesian Loss For Crowd Count Estimation With Point SupervisionDocument10 pagesICCV2019 - Bayesian Loss For Crowd Count Estimation With Point SupervisionvenjynNo ratings yet
- Real Image Denoising With Feature AttentionDocument10 pagesReal Image Denoising With Feature AttentionWENTING XUNo ratings yet
- Nguyen Clusformer A Transformer Based Clustering Approach To Unsupervised Large-Scale Face CVPR 2021 PaperDocument10 pagesNguyen Clusformer A Transformer Based Clustering Approach To Unsupervised Large-Scale Face CVPR 2021 PaperVictor LöfgrenNo ratings yet
- TCSVT2018 - Beyond Counting Comparisons of Density Maps For Crowd Analysis Tasks Counting Detection and TrackingDocument15 pagesTCSVT2018 - Beyond Counting Comparisons of Density Maps For Crowd Analysis Tasks Counting Detection and TrackingvenjynNo ratings yet
- Embedded Features For 1D CNN-based Action Recognition On Depth MapsDocument13 pagesEmbedded Features For 1D CNN-based Action Recognition On Depth Mapsjacekt89No ratings yet
- CVPR2019 Residual Regression With Semantic Prior For Crowd CountingDocument10 pagesCVPR2019 Residual Regression With Semantic Prior For Crowd CountingvenjynNo ratings yet
- Global Relation Reasoning Graph Convolutional Networks For Human Pose EstimationDocument9 pagesGlobal Relation Reasoning Graph Convolutional Networks For Human Pose EstimationJuan ZarateNo ratings yet
- Adaptive Sparse Image Sampling and RecoveryDocument15 pagesAdaptive Sparse Image Sampling and RecoveryDan C. SâmpetreanNo ratings yet
- Pramono Hierarchical Self-Attention Network For Action Localization in Videos ICCV 2019 PaperDocument10 pagesPramono Hierarchical Self-Attention Network For Action Localization in Videos ICCV 2019 Papervishalk172No ratings yet
- Synopsis 1Document4 pagesSynopsis 1Hrishikesh GaikwadNo ratings yet
- Convolutional Neural Network For Satellite Image ClassificationDocument14 pagesConvolutional Neural Network For Satellite Image Classificationwilliam100% (1)
- Cite 256 Action Recognition Based On Joint Trajectory Maps Using Convolutional Neural Networks ACM M 2017Document5 pagesCite 256 Action Recognition Based On Joint Trajectory Maps Using Convolutional Neural Networks ACM M 2017姜华为No ratings yet
- Mixture Dense Regression For Object Detection and Human Pose Estimation CVPR 2020 PaperDocument10 pagesMixture Dense Regression For Object Detection and Human Pose Estimation CVPR 2020 PaperVaibhav BhandareNo ratings yet
- Csrnet: Dilated Convolutional Neural Networks For Understanding The Highly Congested ScenesDocument16 pagesCsrnet: Dilated Convolutional Neural Networks For Understanding The Highly Congested ScenesJoseph JeremyNo ratings yet
- Online Detection and Classification of Dynamic Hand Gestures With Recurrent 3D Convolutional Neural NetworksDocument9 pagesOnline Detection and Classification of Dynamic Hand Gestures With Recurrent 3D Convolutional Neural NetworksPawan ChaurasiyaNo ratings yet
- Action RecognitionDocument14 pagesAction RecognitionJ SANDHYANo ratings yet
- 5 VNet PDFDocument11 pages5 VNet PDFSUMOD SUNDARNo ratings yet
- Volumetric and Multi-View CNNs For Object Classification On 3D DataDocument14 pagesVolumetric and Multi-View CNNs For Object Classification On 3D Datamichal.lubaNo ratings yet
- Multimodal Transfer Learning-Based Approaches For Retinal Vascular SegmentationDocument8 pagesMultimodal Transfer Learning-Based Approaches For Retinal Vascular SegmentationOscar Julian Perdomo CharryNo ratings yet
- Depth Estimation From Single Image Using CNN-Residual NetworkDocument8 pagesDepth Estimation From Single Image Using CNN-Residual NetworkBora CobanogluNo ratings yet
- El Asal ACCV16Document17 pagesEl Asal ACCV16Fatima NoorNo ratings yet
- A Rotation-Invariant Convolutional Neural Network For ImageDocument5 pagesA Rotation-Invariant Convolutional Neural Network For ImageMohammad WaleedNo ratings yet
- Algorithms: A Combined Full-Reference Image Quality Assessment Method Based On Convolutional Activation MapsDocument21 pagesAlgorithms: A Combined Full-Reference Image Quality Assessment Method Based On Convolutional Activation MapsCẩm Tú CầuNo ratings yet
- 7146 Do Deep Neural Networks Suffer From CrowdingDocument11 pages7146 Do Deep Neural Networks Suffer From CrowdingConorNo ratings yet
- Structural-Damage Detection With Big Data Using Parallel ComputingDocument11 pagesStructural-Damage Detection With Big Data Using Parallel ComputinglucasamericogarciaNo ratings yet
- 229 PDFDocument7 pages229 PDFliviu_xzibit5770No ratings yet
- Single Image Dehazing Using A Multilayer PerceptronDocument12 pagesSingle Image Dehazing Using A Multilayer PerceptronkumarahladNo ratings yet
- Brain Region Segmentation Using Convolutional Neural NetworkDocument6 pagesBrain Region Segmentation Using Convolutional Neural NetworkSAI CHAKRADHAR GNo ratings yet
- Applsci 12 06881Document15 pagesApplsci 12 06881GeHad MoheyNo ratings yet
- Fine-Tuning CNN Image Retrieval With No Human AnnotationDocument14 pagesFine-Tuning CNN Image Retrieval With No Human AnnotationJaswanthh KrishnaNo ratings yet
- Human Action Behavior Recognition in Still Images With Proposed Frames Selection Using Transfer LearningDocument19 pagesHuman Action Behavior Recognition in Still Images With Proposed Frames Selection Using Transfer LearningRasoolNaniNo ratings yet
- Biomedical Research PaperDocument7 pagesBiomedical Research PaperSathvik ShenoyNo ratings yet
- People Counting in Crowd Faster R-CNNDocument9 pagesPeople Counting in Crowd Faster R-CNNIJRASETPublicationsNo ratings yet
- 3D CNN For Human Action Recognition: Conference PaperDocument7 pages3D CNN For Human Action Recognition: Conference PaperHrishikeshNo ratings yet
- Sun Human Action Recognition ICCV 2015 PaperDocument9 pagesSun Human Action Recognition ICCV 2015 PaperMohit KumarNo ratings yet
- Image-Based Learning To Measure Traffic Density Using A Deep Convolutional Neural Network 2018Document6 pagesImage-Based Learning To Measure Traffic Density Using A Deep Convolutional Neural Network 2018p.viaaNo ratings yet
- Monocular Depth Estimation Based On Deep Learning An OverviewDocument16 pagesMonocular Depth Estimation Based On Deep Learning An OverviewJ SpencerNo ratings yet
- CNN Based Features Extraction For Age Estimation and Gender ClassificationDocument8 pagesCNN Based Features Extraction For Age Estimation and Gender ClassificationkorichiNo ratings yet
- Abstract: Review Paper On A Review of Algorithms and Methodologies Used To Detect Breast Cancer in Women Harshil ShahDocument13 pagesAbstract: Review Paper On A Review of Algorithms and Methodologies Used To Detect Breast Cancer in Women Harshil ShahSubarna LamsalNo ratings yet
- Paper 82-Hyperspectral Image ClassificationDocument7 pagesPaper 82-Hyperspectral Image ClassificationDharmi JaviyaNo ratings yet
- Human Action Recognition System For Elderly and Children Care Using Three Stream ConvNetDocument5 pagesHuman Action Recognition System For Elderly and Children Care Using Three Stream ConvNetMitchell Angel Gomez OrtegaNo ratings yet
- Jmri 27078Document14 pagesJmri 27078Edward Ventura BarrientosNo ratings yet
- Tang Deep Progressive Reinforcement CVPR 2018 PaperDocument10 pagesTang Deep Progressive Reinforcement CVPR 2018 PaperTruong GiangNo ratings yet
- Hedge TrackingDocument9 pagesHedge Trackinggeorgez111No ratings yet
- Aguilera Learning Cross-Spectral Similarity CVPR 2016 PaperDocument9 pagesAguilera Learning Cross-Spectral Similarity CVPR 2016 Papercaxidas953No ratings yet
- Human Action Recognition On Raw Depth MapsDocument4 pagesHuman Action Recognition On Raw Depth Mapsjacekt89No ratings yet
- Li Depth and Surface 2015 CVPR PaperDocument9 pagesLi Depth and Surface 2015 CVPR PaperMNo ratings yet
- A Novel Spectral Clustering Method With Superpixels For Image SegmentationDocument7 pagesA Novel Spectral Clustering Method With Superpixels For Image SegmentationBela BNo ratings yet
- CNN and RNN Comparative Study For Intrusion Detection SystemDocument12 pagesCNN and RNN Comparative Study For Intrusion Detection SystemIshika ChokshiNo ratings yet
- Real-Time Salient Object Detection With A Minimum Spanning TreeDocument9 pagesReal-Time Salient Object Detection With A Minimum Spanning TreeSaeideh OraeiNo ratings yet
- Joint Estimation of Age and Gender From Unconstrained Face Images Using Lightweight Multi-Task CNN For Mobile ApplicationsDocument4 pagesJoint Estimation of Age and Gender From Unconstrained Face Images Using Lightweight Multi-Task CNN For Mobile ApplicationsAnil Kumar BNo ratings yet
- CNN Histapathology PaperDocument6 pagesCNN Histapathology PaperMr BenniganNo ratings yet
- Real Time Object Detection Using CNNDocument5 pagesReal Time Object Detection Using CNNyevanNo ratings yet
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonFrom EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonNo ratings yet
- Making On-Line Adaptive Radiotherapy Possible Using Artificial Intelligence and Machine Learning For Efficient Daily Re-PlanningDocument10 pagesMaking On-Line Adaptive Radiotherapy Possible Using Artificial Intelligence and Machine Learning For Efficient Daily Re-Planningzhen yongjieNo ratings yet
- (IJCST-V11I3P7) :nikhil K. Pawanikar, R. SrivaramangaiDocument15 pages(IJCST-V11I3P7) :nikhil K. Pawanikar, R. SrivaramangaiEighthSenseGroupNo ratings yet
- A Unified Microstructure Segmentation Approach Via Human-In-The-Loop Machine LearningDocument8 pagesA Unified Microstructure Segmentation Approach Via Human-In-The-Loop Machine Learning1286313960No ratings yet
- GCD Detailed SyllabusDocument24 pagesGCD Detailed SyllabusreddybharathNo ratings yet
- Hatdog 1.2Document18 pagesHatdog 1.2Jonafe PiamonteNo ratings yet
- TapNet - Multivariate Time Series Classification With Attentional Prototypical NetworkDocument8 pagesTapNet - Multivariate Time Series Classification With Attentional Prototypical NetworkJiaxu ChenNo ratings yet
- Gender and Age DetectionDocument16 pagesGender and Age Detectionkambam swarna kanth reddyNo ratings yet
- 421-Article Text-1289-1-10-20220916Document11 pages421-Article Text-1289-1-10-20220916Rizky HandayaniNo ratings yet
- Deep Reinforcement Learning PDFDocument150 pagesDeep Reinforcement Learning PDFOscar Julian Perdomo CharryNo ratings yet
- Data Analyst SyllabusDocument25 pagesData Analyst SyllabussagarNo ratings yet
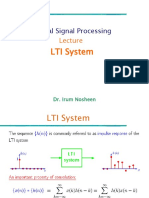
- LTI System: Digital Signal ProcessingDocument40 pagesLTI System: Digital Signal ProcessingIrum Nausheen Lecturer - FETNo ratings yet
- The Power of Deep Learning To Ligand-Based Novel Drug DiscoveryDocument11 pagesThe Power of Deep Learning To Ligand-Based Novel Drug DiscoveryBilal AhmadNo ratings yet
- Detection of Malfunctioning Photovoltaic Modules Based On Machine Learning AlgorithmsDocument10 pagesDetection of Malfunctioning Photovoltaic Modules Based On Machine Learning AlgorithmsRodrigoNo ratings yet
- IoT LearningDocument6 pagesIoT LearningDeepak PareekNo ratings yet
- Spectnet: End-To-End Audio Signal Classification Using Learnable Spectrogram FeaturesDocument8 pagesSpectnet: End-To-End Audio Signal Classification Using Learnable Spectrogram FeaturessdvsberNo ratings yet
- Stacked Ensemble Learning For Malaria DetectionDocument6 pagesStacked Ensemble Learning For Malaria DetectionGopi ChandNo ratings yet
- Developing Bacterial Wilt Detection Model On Enset Crop Using A Deep Learning ApproachDocument91 pagesDeveloping Bacterial Wilt Detection Model On Enset Crop Using A Deep Learning ApproachSofi KetemaNo ratings yet
- ReportDocument49 pagesReportShubham LokhandeNo ratings yet
- An Ensemble 1D-CNN-LSTM-GRU Model With Data Augmentation For Speech Emotion RecognitionDocument19 pagesAn Ensemble 1D-CNN-LSTM-GRU Model With Data Augmentation For Speech Emotion RecognitionJose AngelNo ratings yet
- Face Detection Using Deep Learning - An Improved Faster RCNN ApproDocument10 pagesFace Detection Using Deep Learning - An Improved Faster RCNN ApproCNS CNSNo ratings yet
- A Deep CNN To Detect Pulmonary Abnormalities in Chest X-Ray Tuberculosis, PneumoniaDocument3 pagesA Deep CNN To Detect Pulmonary Abnormalities in Chest X-Ray Tuberculosis, PneumoniaShoumik MuhtasimNo ratings yet
- Wheel Defect Detection With Machine LearningDocument31 pagesWheel Defect Detection With Machine LearningABHIMANUE K SNo ratings yet
- Comparison of Deep Concolutional Neural Networks and Edge Detectors For Image-Based Crack Detection in ConcreteDocument15 pagesComparison of Deep Concolutional Neural Networks and Edge Detectors For Image-Based Crack Detection in ConcreteCamilo matta torresNo ratings yet
- Keras For Beginners: Implementing A Recurrent Neural NetworkDocument13 pagesKeras For Beginners: Implementing A Recurrent Neural NetworkRobert DEL POPOLONo ratings yet
- Brain Tumor Classification Using CNNDocument5 pagesBrain Tumor Classification Using CNNIJRASETPublicationsNo ratings yet
- Updated ICISN 2024 v6Document10 pagesUpdated ICISN 2024 v6Tuyển NguyễnNo ratings yet
- Learning To Classify Materials Using Mueller Imaging PolarimetryDocument8 pagesLearning To Classify Materials Using Mueller Imaging PolarimetryGuiandgui GuiNo ratings yet
- Stable Diffusion A TutorialDocument66 pagesStable Diffusion A Tutorialmarkus.aurelius100% (1)
- Real-Time 6D Object Pose Estimation On CPU: Yoshinori Konishi, Kosuke Hattori and Manabu HashimotoDocument8 pagesReal-Time 6D Object Pose Estimation On CPU: Yoshinori Konishi, Kosuke Hattori and Manabu HashimotoNicolas ProuteauNo ratings yet
- 12328-Article Text-15856-1-2-20201228Document9 pages12328-Article Text-15856-1-2-20201228Hailin SunNo ratings yet