Download as pdf or txt
You might also like
- New Technologies, Artificial Intelligence and Shipping Law in The 21st Century First EditionDocument225 pagesNew Technologies, Artificial Intelligence and Shipping Law in The 21st Century First EditionMohamed ElamiriNo ratings yet
- Zero Point CalibrationDocument8 pagesZero Point Calibrationjohnatan chui100% (3)
- Intake and Exhaust Optimization of Fsae Car Based On Orthogonal Array TestingDocument5 pagesIntake and Exhaust Optimization of Fsae Car Based On Orthogonal Array Testingrudey18No ratings yet
- Optimization of Driving Technique of RWD Racing CaDocument9 pagesOptimization of Driving Technique of RWD Racing CaTomas SalinasNo ratings yet
- Design of Machine Tool Gearboxes Driven by Double Speed Electric MotorsDocument10 pagesDesign of Machine Tool Gearboxes Driven by Double Speed Electric Motorsabrez100% (1)
- Full Vehicle Simulation ModelDocument24 pagesFull Vehicle Simulation ModelIqbal NugrohoNo ratings yet
- ICOME2010 Preda CarSuspensionOptimizationDocument8 pagesICOME2010 Preda CarSuspensionOptimizationSantiago UrgilesNo ratings yet
- Three Wheeled Vehicle Eprintsrvr IIScDocument30 pagesThree Wheeled Vehicle Eprintsrvr IIScSunilkumar ReddyNo ratings yet
- Designing A Final Drive For A Tracked VehicleDocument9 pagesDesigning A Final Drive For A Tracked VehicleIroshana Thushara KiriwattuduwaNo ratings yet
- Vehicles 03 00019 v2Document30 pagesVehicles 03 00019 v2Pierre GanNo ratings yet
- Modelling and Analysis of Automatic TransmissionDocument12 pagesModelling and Analysis of Automatic TransmissionmechnareshNo ratings yet
- University of Huddersfield RepositoryDocument9 pagesUniversity of Huddersfield RepositoryAnonymous zuu1MLNo ratings yet
- DesignofSteeringSystem Draft PDFDocument11 pagesDesignofSteeringSystem Draft PDFAshish IngaleNo ratings yet
- Brake Report 2015Document38 pagesBrake Report 2015Pratyush NagareNo ratings yet
- Bond Graph Modeling and Simulation of A FullDocument6 pagesBond Graph Modeling and Simulation of A FullAnirban MitraNo ratings yet
- Development of The Braking Performance Evaluation Technology For High-Speed Brake DynamometerDocument8 pagesDevelopment of The Braking Performance Evaluation Technology For High-Speed Brake DynamometerNur EfendiNo ratings yet
- Rebuttal - IMECE2016 66312 1Document9 pagesRebuttal - IMECE2016 66312 1nrghataNo ratings yet
- Design Project TwoDocument10 pagesDesign Project Twogeletayaadii100% (1)
- Designing Energy Efficient Traction Machines For Electric and Hybrid VehiclesDocument9 pagesDesigning Energy Efficient Traction Machines For Electric and Hybrid VehicleskodeegNo ratings yet
- Analysis of Alternative Front Suspension Systems For MotorcyclesDocument10 pagesAnalysis of Alternative Front Suspension Systems For MotorcyclesRasbin SharmaNo ratings yet
- The Influence of Number and Values of Ratios in STDocument11 pagesThe Influence of Number and Values of Ratios in STIsmah ParmigianiNo ratings yet
- Article 1 - Gear RatioDocument21 pagesArticle 1 - Gear Ratiomohamad helmiNo ratings yet
- Development of Semi-Active Road-Friendly Truck SuspensionsDocument10 pagesDevelopment of Semi-Active Road-Friendly Truck SuspensionsLe ThanhNo ratings yet
- CONAT 2010 Tamba AndreiDocument8 pagesCONAT 2010 Tamba AndreiAdelin SimtinicaNo ratings yet
- DesignofSteeringSystem DraftDocument11 pagesDesignofSteeringSystem DraftAndy ChangNo ratings yet
- Multi Spindle GearboxDocument4 pagesMulti Spindle GearboxAkash Kumar DevNo ratings yet
- What Is A Diesel-RKDocument4 pagesWhat Is A Diesel-RKSarawoot WatechagitNo ratings yet
- Rollover Prevention ReportDocument62 pagesRollover Prevention ReportcpamechaNo ratings yet
- How Much Does Traffic Congestion Increase Fuel ConDocument17 pagesHow Much Does Traffic Congestion Increase Fuel Consnehalthakare556No ratings yet
- Hard Point OptimizationDocument8 pagesHard Point OptimizationAnkitRajNo ratings yet
- 31 CR Mo V9Document12 pages31 CR Mo V9Jigar M. UpadhyayNo ratings yet
- Drag Go Kart IJVD - DraftDocument13 pagesDrag Go Kart IJVD - DraftDuzzysNo ratings yet
- Drag Go Kart IJVD - Draft PDFDocument13 pagesDrag Go Kart IJVD - Draft PDFFardeen PathanNo ratings yet
- R04706112117 PDFDocument6 pagesR04706112117 PDFSantiago UrgilesNo ratings yet
- Volltext PDFDocument12 pagesVolltext PDFZhenyu PanNo ratings yet
- Sae Technical 2008-36-0253 Paper Series: Design and Optimization of A Space Frame ChassisDocument11 pagesSae Technical 2008-36-0253 Paper Series: Design and Optimization of A Space Frame ChassisCharlie TejNo ratings yet
- Comparison Lugner-TTI 2009Document4 pagesComparison Lugner-TTI 2009DougMillikenNo ratings yet
- Design of Powertrain System For An All Terrain Vehicle Ijariie8548Document5 pagesDesign of Powertrain System For An All Terrain Vehicle Ijariie8548Vinay BadigerNo ratings yet
- Simulation of Dynamic Rollover There SH Old For Heavy TrucksDocument9 pagesSimulation of Dynamic Rollover There SH Old For Heavy TrucksDCcover100% (1)
- 2015-SAE-Prediction of High Altitude Performance For UAV Engine PDFDocument6 pages2015-SAE-Prediction of High Altitude Performance For UAV Engine PDF128mansouriNo ratings yet
- MaziluPreda CONAT2016 Rackpinion SteeringDocument11 pagesMaziluPreda CONAT2016 Rackpinion SteeringJunaid QureshiNo ratings yet
- Aerodynamic Optimization of The Opel Calibra ITC Racing Car Using Experiments and Computational Fluid DynamicsDocument12 pagesAerodynamic Optimization of The Opel Calibra ITC Racing Car Using Experiments and Computational Fluid DynamicsVyssionNo ratings yet
- Powered, Aerodynamic Simulations of An Airbreathing, Hypersonic VehicleDocument20 pagesPowered, Aerodynamic Simulations of An Airbreathing, Hypersonic VehicleNice tryNo ratings yet
- Servo Motor Design Using MotorSolveDocument20 pagesServo Motor Design Using MotorSolveSK PNo ratings yet
- Optimizing Planetary Gears PDFDocument7 pagesOptimizing Planetary Gears PDFyildyusuf100% (1)
- Design and Fabrication of Exhaust System of Formula Student CarDocument13 pagesDesign and Fabrication of Exhaust System of Formula Student CarIJRASETPublicationsNo ratings yet
- Rollover Calculation System October 17, 2003 1Document21 pagesRollover Calculation System October 17, 2003 1GilbertoNo ratings yet
- Design Report RedHawkDocument8 pagesDesign Report RedHawkAarón Amador Núñez RascónNo ratings yet
- An Investigation of Control Strategies On Gearbox Damage: Abstract: 2. Experiment SetupDocument5 pagesAn Investigation of Control Strategies On Gearbox Damage: Abstract: 2. Experiment Setupash1968No ratings yet
- Sathyabama: (Deemed To Be University)Document3 pagesSathyabama: (Deemed To Be University)Vijay RichardsonNo ratings yet
- Vehicle Chassis-Suspension Dynamics Analysis PDFDocument5 pagesVehicle Chassis-Suspension Dynamics Analysis PDFSuhash MediboinaNo ratings yet
- How Much Does Traffic Congestion Increase Fuel ConDocument18 pagesHow Much Does Traffic Congestion Increase Fuel Conabuzar ghaffariNo ratings yet
- Mechanical ApplicationDocument21 pagesMechanical Applicationme22b014No ratings yet
- About The Preliminary Design of The Suspension SPRDocument7 pagesAbout The Preliminary Design of The Suspension SPRalinNo ratings yet
- Discrete-Time For Traction: RobustDocument7 pagesDiscrete-Time For Traction: RobustfenasikarimNo ratings yet
- Economic Solution For Data Acquisition in A Formula SAE Race CarDocument6 pagesEconomic Solution For Data Acquisition in A Formula SAE Race CarmclarenrulzNo ratings yet
- A Tool For Lap Time SimulationDocument5 pagesA Tool For Lap Time SimulationRodrigo BobNo ratings yet
- ليث اشرف ابراهيم محمد HW.4Document6 pagesليث اشرف ابراهيم محمد HW.4ليث كليبNo ratings yet
- Using Modelica Models For Driver-In-The-loop SimulatorsDocument8 pagesUsing Modelica Models For Driver-In-The-loop SimulatorsRodrigo BobNo ratings yet
- High Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsFrom EverandHigh Speed Off-Road Vehicles: Suspensions, Tracks, Wheels and DynamicsNo ratings yet
- DSCC 2012 FinalDocument10 pagesDSCC 2012 Finalpad abtNo ratings yet
- Synthesis and Simulation of A Multi LinkDocument6 pagesSynthesis and Simulation of A Multi Linkpad abtNo ratings yet
- Kinematic Analysis For Planetary Gearbox Applied in Hybrid Electric VehiclesDocument11 pagesKinematic Analysis For Planetary Gearbox Applied in Hybrid Electric Vehiclespad abtNo ratings yet
- Rahnejat Et Al 2023 Multi Body Dynamics in Vehicle EngineeringDocument24 pagesRahnejat Et Al 2023 Multi Body Dynamics in Vehicle Engineeringpad abtNo ratings yet
- Analysis of The Kinematics and Compliance of A PasDocument10 pagesAnalysis of The Kinematics and Compliance of A Paspad abtNo ratings yet
- Dot 29854 DS1Document306 pagesDot 29854 DS1pad abtNo ratings yet
- A Feasible Identification Method of Uncertainty Responses For Vehicle StructuresDocument17 pagesA Feasible Identification Method of Uncertainty Responses For Vehicle Structurespad abtNo ratings yet
- Kinema Tic Modeling of A Special DW Suspension SystemDocument12 pagesKinema Tic Modeling of A Special DW Suspension Systempad abtNo ratings yet
- The Controllable Ball Joint MechanismDocument9 pagesThe Controllable Ball Joint Mechanismpad abtNo ratings yet
- HTTPWWW BG Utp Edu Plartjok12011jok12011683Document6 pagesHTTPWWW BG Utp Edu Plartjok12011jok12011683pad abtNo ratings yet
- 2004paper MUBO03022Document24 pages2004paper MUBO03022pad abtNo ratings yet
- Multi-Disciplinary Optimisation of Road Vehicle Chassis SubsystemsDocument22 pagesMulti-Disciplinary Optimisation of Road Vehicle Chassis Subsystemspad abtNo ratings yet
- Blast-Induced Compression of A Thin-Walled AluminuDocument24 pagesBlast-Induced Compression of A Thin-Walled Aluminupad abtNo ratings yet
- Wevj 15 00107 v2Document26 pagesWevj 15 00107 v2pad abtNo ratings yet
- Analytical Simulation and Verification of Air GunDocument55 pagesAnalytical Simulation and Verification of Air Gunpad abtNo ratings yet
- Design of Automotive ConstructionsDocument7 pagesDesign of Automotive Constructionspad abtNo ratings yet
- Organization Study: A Project Report OnDocument89 pagesOrganization Study: A Project Report OnSaad BurhanNo ratings yet
- Safety and Security Analysis in Automated Urban Guided Transport Systems Using STPADocument30 pagesSafety and Security Analysis in Automated Urban Guided Transport Systems Using STPAVishwanath PujariNo ratings yet
- BRM Maruti SuzukiDocument2 pagesBRM Maruti SuzukiMadhuri ShirkarNo ratings yet
- Assignment 2 EOT 1032Document5 pagesAssignment 2 EOT 1032Rajbir SinghNo ratings yet
- JSA Main SheetDocument1 pageJSA Main SheetMARIA MANOJNo ratings yet
- B737-800 KuizDocument3 pagesB737-800 Kuizkairol nizam bin mansorNo ratings yet
- Performance and Durability in One: Kalmar DRT450Document5 pagesPerformance and Durability in One: Kalmar DRT450Info SpeedfixNo ratings yet
- Mx-Mty-Mty: Express Easy TRCDocument2 pagesMx-Mty-Mty: Express Easy TRCFrancisco MezaNo ratings yet
- InsuranceDocument4 pagesInsuranceKarthik VeniNo ratings yet
- Profile LuisDocument3 pagesProfile LuisPeter SonNo ratings yet
- Volvo VNL Operators ManualDocument504 pagesVolvo VNL Operators ManualJohn MichaelNo ratings yet
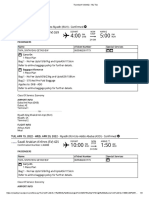
- My Trip: Saudi Arabian Airlines (SV) 559Document3 pagesMy Trip: Saudi Arabian Airlines (SV) 559Yoseph ShimelsNo ratings yet
- Mr. Chu ResumeDocument3 pagesMr. Chu Resume楚亚东No ratings yet
- DaewooDocument32 pagesDaewooyaqoob008No ratings yet
- Aasca Events Calendar. 2023 2024Document5 pagesAasca Events Calendar. 2023 2024jt6jxptrkjNo ratings yet
- I Bau Hamburg: Original ComponentsDocument28 pagesI Bau Hamburg: Original ComponentsCarlos DiazNo ratings yet
- 3rd Nothing New Under SunDocument2 pages3rd Nothing New Under SunyvhonnedelimaNo ratings yet
- Macenas V CADocument24 pagesMacenas V CACathy BelgiraNo ratings yet
- I HRG0U25702 Panel-Mounted Cab Assembly (Option)Document19 pagesI HRG0U25702 Panel-Mounted Cab Assembly (Option)joao bianchiniNo ratings yet
- TSDDocument16 pagesTSDSaurabh SinghNo ratings yet
- Vehicles CAD Blocks - Cars in Plan ViewDocument3 pagesVehicles CAD Blocks - Cars in Plan Viewvignesh kumarNo ratings yet
- Chinese Car Auto Parts For Russia Market From Cina Auto PartsDocument131 pagesChinese Car Auto Parts For Russia Market From Cina Auto PartsCINA auto partsNo ratings yet
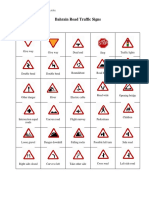
- Bahrain Road Traffic SignsDocument3 pagesBahrain Road Traffic Signsnishanthaindika100% (1)
- Transverse Post-Tensioning Design and Detailing of Precast Prestressed Concrete Adjacent-Box-Girder Bridges PDFDocument15 pagesTransverse Post-Tensioning Design and Detailing of Precast Prestressed Concrete Adjacent-Box-Girder Bridges PDFSanti CheewabantherngNo ratings yet
- PC - Print - 11-15-24 AmDocument4 pagesPC - Print - 11-15-24 AmTheo AnggaraNo ratings yet
- RegsssDocument44 pagesRegsssPrerak Kumar SharmaNo ratings yet
- Irctcs E Ticketing Service Electronic Reservation Slip (Personal User)Document2 pagesIrctcs E Ticketing Service Electronic Reservation Slip (Personal User)దూర్వాసుల శ్రీనివాస్No ratings yet
- Reliable Easy To Use: Truck-Mounted Concrete Boom PumpDocument2 pagesReliable Easy To Use: Truck-Mounted Concrete Boom PumpXiangzhendong100% (1)