Download as pdf or txt
You might also like
- 19 TVR6G ID+OD 50Hz Product CatalgoueDocument98 pages19 TVR6G ID+OD 50Hz Product CatalgoueKareem Abo Seif100% (1)
- IEC 60079-2-2014 Cor1-2015Document8 pagesIEC 60079-2-2014 Cor1-2015grauNo ratings yet
- MMT 5link 2002Document20 pagesMMT 5link 2002James HillNo ratings yet
- MMT 5link 2002Document20 pagesMMT 5link 2002pad abtNo ratings yet
- 31983-Article Text-123228-1-10-20230617Document9 pages31983-Article Text-123228-1-10-20230617pad abtNo ratings yet
- Advances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Document34 pagesAdvances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Tyrone BerryNo ratings yet
- Synthesis and Analysis of The Five-Link Rear Suspension System Used in AutomobilesDocument18 pagesSynthesis and Analysis of The Five-Link Rear Suspension System Used in AutomobilesManish RajNo ratings yet
- Multilink 5 LinksDocument18 pagesMultilink 5 LinkstotyNo ratings yet
- DimensionnementDocument10 pagesDimensionnementSliim AmiriNo ratings yet
- Kinematics and Dynamics Analysis of Mcpherson Suspension Based On Planar 1/4 Vehicle ModelDocument5 pagesKinematics and Dynamics Analysis of Mcpherson Suspension Based On Planar 1/4 Vehicle ModelIulian NgiNo ratings yet
- Analysis and Optimization of The Vehicle Handling Stability With Considering Suspension Kinematics and Compliance CharacteristicsDocument25 pagesAnalysis and Optimization of The Vehicle Handling Stability With Considering Suspension Kinematics and Compliance CharacteristicsESHETU SILESHINo ratings yet
- ES140205 - Sujit Parmeshwar Narwade 72-80Document9 pagesES140205 - Sujit Parmeshwar Narwade 72-80Kubilay AçıkgözNo ratings yet
- JMD RackPinion 2000Document8 pagesJMD RackPinion 2000SalvadorNo ratings yet
- Analisi Cinematica McPherson Strut 3DDocument30 pagesAnalisi Cinematica McPherson Strut 3DDomenico GarofaloNo ratings yet
- Automated Visco-Elastic Analysis of Large Scale Inertia-Variant Spatial VehiclesDocument14 pagesAutomated Visco-Elastic Analysis of Large Scale Inertia-Variant Spatial VehiclesCleves AxiomaNo ratings yet
- Improved Bushing Models For General Multibody Systems and Vehicle DynamicsDocument25 pagesImproved Bushing Models For General Multibody Systems and Vehicle DynamicsAlfoilNo ratings yet
- Real-Time Multibody Simulation of Vehicle Wheel Suspensions of Different Topologies With Elastokinematic PropertiesDocument17 pagesReal-Time Multibody Simulation of Vehicle Wheel Suspensions of Different Topologies With Elastokinematic Propertiespad abtNo ratings yet
- Kinematicand Dynamic Analysisfora New Mac Pherson Strut Suspension SystemDocument17 pagesKinematicand Dynamic Analysisfora New Mac Pherson Strut Suspension SystemDragos BotnariNo ratings yet
- Cheri An 2009Document24 pagesCheri An 2009Shriyash KamatNo ratings yet
- Model-Based Design of An Active Suspension For TheDocument21 pagesModel-Based Design of An Active Suspension For Theankon dasNo ratings yet
- Design of An Ackermann Type Steering Mechanism: ArticleDocument15 pagesDesign of An Ackermann Type Steering Mechanism: ArticleKaasamHarishKumarNo ratings yet
- Multi Link Suspension OptimizationDocument11 pagesMulti Link Suspension OptimizationAlex Bradley100% (1)
- TrISToMM 2015 Paper66Document11 pagesTrISToMM 2015 Paper66Diego MascarenhasNo ratings yet
- Machines 09 00245 v2Document34 pagesMachines 09 00245 v2Martí carboNo ratings yet
- A Comparative Analysis Between The Vehicles' Passive and Active SuspensionsDocument9 pagesA Comparative Analysis Between The Vehicles' Passive and Active SuspensionsAlberto CarbajalNo ratings yet
- HydropnematicDocument17 pagesHydropnematicSareddy HemareddyNo ratings yet
- A Modified Damping Model of Vector Form Intrinsic Finite Element Method For High-Speed Spiral Bevel Gear Dynamic Characteristics AnalysisDocument11 pagesA Modified Damping Model of Vector Form Intrinsic Finite Element Method For High-Speed Spiral Bevel Gear Dynamic Characteristics AnalysisNgoc Thang NguyenNo ratings yet
- Applied Sciences: Dynamic Decoupling and Trajectory Tracking For Automated Vehicles Based On The Inverse SystemDocument17 pagesApplied Sciences: Dynamic Decoupling and Trajectory Tracking For Automated Vehicles Based On The Inverse SystemMesum IrfaniNo ratings yet
- Stroud 2015Document6 pagesStroud 2015Dhananjay SargarNo ratings yet
- Vehicle Modeling Using BGDocument11 pagesVehicle Modeling Using BGDanish MoinNo ratings yet
- Modal Analysis of Quarter Car Model SuspDocument9 pagesModal Analysis of Quarter Car Model SuspSanjay SanjayNo ratings yet
- ICOME2010 Preda CarSuspensionOptimizationDocument8 pagesICOME2010 Preda CarSuspensionOptimizationSantiago UrgilesNo ratings yet
- Design, Analysis and Manufacturing A Double Wishbone Suspension System With Variable Camber Angle by Pneumatics MechanismDocument8 pagesDesign, Analysis and Manufacturing A Double Wishbone Suspension System With Variable Camber Angle by Pneumatics MechanismTristan GrossNo ratings yet
- FinalDocument24 pagesFinalApoorvaNo ratings yet
- Use and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperDocument5 pagesUse and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperRockerss RockerssNo ratings yet
- Research Article: A Hysteresis-Based Steering Feel Model For Steer-by-Wire SystemsDocument15 pagesResearch Article: A Hysteresis-Based Steering Feel Model For Steer-by-Wire Systemspepiperepalo3No ratings yet
- MaziluPreda CONAT2016 Rackpinion SteeringDocument11 pagesMaziluPreda CONAT2016 Rackpinion SteeringJunaid QureshiNo ratings yet
- (23540192 - Mechanics and Mechanical Engineering) Kinematic and Dynamic Analysis For A New MacPherson Strut Suspension SystemDocument16 pages(23540192 - Mechanics and Mechanical Engineering) Kinematic and Dynamic Analysis For A New MacPherson Strut Suspension SystemIulian NgiNo ratings yet
- Design of An Ackermann Type Steering MechanismDocument15 pagesDesign of An Ackermann Type Steering MechanismIkshwakNo ratings yet
- New Jacobian Approach To The Kinestatic Analysis of A Planar Doublewishbone Suspension MechanismDocument12 pagesNew Jacobian Approach To The Kinestatic Analysis of A Planar Doublewishbone Suspension MechanismSabajonhsons SmithNo ratings yet
- Dynamic Analysis of A Multi-Link Suspension Mechanism With Compliant JointsDocument6 pagesDynamic Analysis of A Multi-Link Suspension Mechanism With Compliant JointsDhrubajyoti DasNo ratings yet
- Vehicle Steering Dynamic Calculation and SimulationDocument11 pagesVehicle Steering Dynamic Calculation and SimulationVaishnavi RoutNo ratings yet
- Vivek Adap SuspDocument21 pagesVivek Adap SuspMohammed Asif NNo ratings yet
- Study On Ride Comfort of Tractor With Tandem Suspension Based On Multi-Body System DynamicsDocument23 pagesStudy On Ride Comfort of Tractor With Tandem Suspension Based On Multi-Body System DynamicsAlexandre Assis Rezende SantosNo ratings yet
- Electronics 11 01856 v2Document14 pagesElectronics 11 01856 v2Manh Nguyen TienNo ratings yet
- Analysis of Vehicle Static Steering Torque Based On Tire-Road Contact Patch Sliding Model and Variable Transmission RatioDocument11 pagesAnalysis of Vehicle Static Steering Torque Based On Tire-Road Contact Patch Sliding Model and Variable Transmission RatioAbdul Kadar JailaniNo ratings yet
- 2012 AMC McPherson Quarter Car Suspension Model Kinematics Dynamics PDFDocument7 pages2012 AMC McPherson Quarter Car Suspension Model Kinematics Dynamics PDFEuNo ratings yet
- 11 Chapter 02 PDFDocument28 pages11 Chapter 02 PDFjoel perieraNo ratings yet
- Anlayesha PaperDocument7 pagesAnlayesha PaperAmit Kumar MeharNo ratings yet
- Dynamic Balance Two-Dimensional Measuring of CrankDocument10 pagesDynamic Balance Two-Dimensional Measuring of CrankAndy BuchoryNo ratings yet
- IMP - Automated Lane Change Controller DesignDocument10 pagesIMP - Automated Lane Change Controller Designjohncena3No ratings yet
- Shock AbsorberDocument13 pagesShock AbsorberYeamlak SisayNo ratings yet
- A Study On The Dynamic Behaviour of Lightweight GeDocument13 pagesA Study On The Dynamic Behaviour of Lightweight GeOmair Nisar KhanNo ratings yet
- An Adaptive Nonsingular Fast Terminal Sliding Mode Control For Yaw Stability Control of Bus Based On STI Tire ModelDocument14 pagesAn Adaptive Nonsingular Fast Terminal Sliding Mode Control For Yaw Stability Control of Bus Based On STI Tire ModelrahmaNo ratings yet
- Applied Sciences: Design General Cam Profiles Based On Finite Element MethodDocument15 pagesApplied Sciences: Design General Cam Profiles Based On Finite Element MethodYuva NNo ratings yet
- An Adaptive Metamodel-Based Optimization ApproachDocument9 pagesAn Adaptive Metamodel-Based Optimization Approachpad abtNo ratings yet
- Identification and Assessment of A Simplified Model For Vehicle Ride SimulationDocument16 pagesIdentification and Assessment of A Simplified Model For Vehicle Ride SimulationpandiyarajmechNo ratings yet
- Effects of Kingpin and Caster Offset On Braking Stability of Long Wheelbase BusDocument16 pagesEffects of Kingpin and Caster Offset On Braking Stability of Long Wheelbase BusZetman Poco90No ratings yet
- 5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemDocument14 pages5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemImpact JournalsNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainFrom EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainNo ratings yet
- Neues verkehrswissenschaftliches Journal - Ausgabe 26: User-based Adaptable High Performance Simulation Modelling and Design for Railway Planning and OperationsFrom EverandNeues verkehrswissenschaftliches Journal - Ausgabe 26: User-based Adaptable High Performance Simulation Modelling and Design for Railway Planning and OperationsNo ratings yet
- DSCC 2012 FinalDocument10 pagesDSCC 2012 Finalpad abtNo ratings yet
- Kinematic Analysis For Planetary Gearbox Applied in Hybrid Electric VehiclesDocument11 pagesKinematic Analysis For Planetary Gearbox Applied in Hybrid Electric Vehiclespad abtNo ratings yet
- Rahnejat Et Al 2023 Multi Body Dynamics in Vehicle EngineeringDocument24 pagesRahnejat Et Al 2023 Multi Body Dynamics in Vehicle Engineeringpad abtNo ratings yet
- Analysis of The Kinematics and Compliance of A PasDocument10 pagesAnalysis of The Kinematics and Compliance of A Paspad abtNo ratings yet
- A Feasible Identification Method of Uncertainty Responses For Vehicle StructuresDocument17 pagesA Feasible Identification Method of Uncertainty Responses For Vehicle Structurespad abtNo ratings yet
- Synthesis and Simulation of A Multi LinkDocument6 pagesSynthesis and Simulation of A Multi Linkpad abtNo ratings yet
- Dot 29854 DS1Document306 pagesDot 29854 DS1pad abtNo ratings yet
- Wevj 15 00107 v2Document26 pagesWevj 15 00107 v2pad abtNo ratings yet
- Kinema Tic Modeling of A Special DW Suspension SystemDocument12 pagesKinema Tic Modeling of A Special DW Suspension Systempad abtNo ratings yet
- HTTPWWW BG Utp Edu Plartjok12011jok12011683Document6 pagesHTTPWWW BG Utp Edu Plartjok12011jok12011683pad abtNo ratings yet
- Blast-Induced Compression of A Thin-Walled AluminuDocument24 pagesBlast-Induced Compression of A Thin-Walled Aluminupad abtNo ratings yet
- The Controllable Ball Joint MechanismDocument9 pagesThe Controllable Ball Joint Mechanismpad abtNo ratings yet
- 2004paper MUBO03022Document24 pages2004paper MUBO03022pad abtNo ratings yet
- Analytical Simulation and Verification of Air GunDocument55 pagesAnalytical Simulation and Verification of Air Gunpad abtNo ratings yet
- Multi-Disciplinary Optimisation of Road Vehicle Chassis SubsystemsDocument22 pagesMulti-Disciplinary Optimisation of Road Vehicle Chassis Subsystemspad abtNo ratings yet
- Design of Automotive ConstructionsDocument7 pagesDesign of Automotive Constructionspad abtNo ratings yet
- Optimization of Wheel Suspension Dampers in Off-Road Rally CarDocument14 pagesOptimization of Wheel Suspension Dampers in Off-Road Rally Carpad abtNo ratings yet
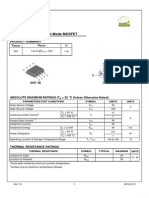
- N-Channel Enhancement Mode MOSFET: Product SummaryDocument5 pagesN-Channel Enhancement Mode MOSFET: Product SummaryTony RodriguesNo ratings yet
- EE6512-Electrical Machines LaboratoryDocument82 pagesEE6512-Electrical Machines LaboratoryGopinath B L NaiduNo ratings yet
- Waste Glass: Table 5.1 Types of Glass and Their Main UsesDocument2 pagesWaste Glass: Table 5.1 Types of Glass and Their Main UsesGowri J BabuNo ratings yet
- TMT Bars (Friends ISI) PDFDocument3 pagesTMT Bars (Friends ISI) PDFPiyushiNo ratings yet
- BKT2031 TDSDocument1 pageBKT2031 TDSAshutoshNo ratings yet
- Work Power and Energy FinalDocument10 pagesWork Power and Energy FinalAnki AccountNo ratings yet
- The Effect of Vacuum Pressure On The Quality of Liquid Palm Sugar Resulting From The Vacuum Evaporation ProcessDocument3 pagesThe Effect of Vacuum Pressure On The Quality of Liquid Palm Sugar Resulting From The Vacuum Evaporation Processsayyid syarifNo ratings yet
- MANUEL Devidoir MillerDocument36 pagesMANUEL Devidoir MillerBrice DreessenNo ratings yet
- Wet BondingDocument3 pagesWet Bondingvrana23No ratings yet
- Aerodynamic Performance Analysis of A Non Planar C-Wing Using Experimental and Numerical ToolsDocument28 pagesAerodynamic Performance Analysis of A Non Planar C-Wing Using Experimental and Numerical ToolsGiang Nguyễn TrườngNo ratings yet
- Current Logic 1000V - 24V Power SupplyDocument2 pagesCurrent Logic 1000V - 24V Power Supplyraza239No ratings yet
- Science-RAFT ExampleDocument4 pagesScience-RAFT ExampleGeetha RangarajanNo ratings yet
- Control of Inverted Pendulum Cart System by Use of Pid ControllerDocument6 pagesControl of Inverted Pendulum Cart System by Use of Pid ControllerDr Saba TareqNo ratings yet
- De Moivre's TheoremDocument3 pagesDe Moivre's TheoremDagim AleneNo ratings yet
- E Gasspring PDFDocument148 pagesE Gasspring PDFSing Industrial Gas VietnamNo ratings yet
- ASTM D 1657 - ISO 3993 - IP 235: Pressure Thermo-HydrometerDocument1 pageASTM D 1657 - ISO 3993 - IP 235: Pressure Thermo-HydrometerRadient MushfikNo ratings yet
- Identifying Elements: ProblemDocument6 pagesIdentifying Elements: ProblemAdamari Andrade OrtizNo ratings yet
- Material Product Data Sheet Iron Chromium Aluminum Yttrium (Fecraly) Thermal Spray PowderDocument3 pagesMaterial Product Data Sheet Iron Chromium Aluminum Yttrium (Fecraly) Thermal Spray PowderfrdnNo ratings yet
- KS4+Electricity+ +electromagnetismDocument24 pagesKS4+Electricity+ +electromagnetismOsama HassanNo ratings yet
- Lecture - 8: Fluid Motion: Streamlines EtcDocument13 pagesLecture - 8: Fluid Motion: Streamlines Etcrohit singhNo ratings yet
- Design of Flexible Pavement - Irc MethodDocument9 pagesDesign of Flexible Pavement - Irc MethodOSIRIS EvilNo ratings yet
- 2019 Improving The Weld Microstructure and Material Properties of K-TIG Welded Armour Steel Joint Using Filler MaterialDocument14 pages2019 Improving The Weld Microstructure and Material Properties of K-TIG Welded Armour Steel Joint Using Filler MaterialStephen PanNo ratings yet
- Chemistry of Period IIDocument6 pagesChemistry of Period IIPAUL KOLERENo ratings yet
- RT Sensitivity Calculation - TwiDocument2 pagesRT Sensitivity Calculation - TwiTomy GeorgeNo ratings yet
- JEE Main 2022 (June 25 Morning Shift) Question Paper With Solutions (PDF)Document24 pagesJEE Main 2022 (June 25 Morning Shift) Question Paper With Solutions (PDF)avaneesh khadyeNo ratings yet
- Very Light Aircraft Model: Sea Level Temperature K Sea Level Pressure Pa Gas Constant J/K/KG Lapse Rate K/MDocument6 pagesVery Light Aircraft Model: Sea Level Temperature K Sea Level Pressure Pa Gas Constant J/K/KG Lapse Rate K/Mrighthere201No ratings yet
- Fourier Series Note5Document13 pagesFourier Series Note52133MANAS PARABNo ratings yet
- Physci 7 - Atoms, Electron Distribution, Valence, LedsDocument44 pagesPhysci 7 - Atoms, Electron Distribution, Valence, LedsChristine FerrerNo ratings yet