Download as pdf or txt
You might also like
- Algebra and Trigonometry 10th Edition Larson Solutions ManualDocument25 pagesAlgebra and Trigonometry 10th Edition Larson Solutions ManualAndrewRobinsonixez100% (58)
- Math Paper PracticeDocument16 pagesMath Paper PracticeVikram Johari50% (2)
- SAT Practice Test 1Document21 pagesSAT Practice Test 1Banu100% (1)
- T SC 2549972 ks3 Electricity and Magnetism Foundation Revision Mat - Ver - 9Document4 pagesT SC 2549972 ks3 Electricity and Magnetism Foundation Revision Mat - Ver - 9Margarida SeromenhoNo ratings yet
- Shear Force and Bending Moment Diagrams With ExamplesDocument12 pagesShear Force and Bending Moment Diagrams With ExamplesHamza ShamsNo ratings yet
- HW 4 Solution PDFDocument5 pagesHW 4 Solution PDFyesNo ratings yet
- Assesment of Risks From High Pressure Natural Gas PipeleinesDocument62 pagesAssesment of Risks From High Pressure Natural Gas Pipeleinesthawdar100% (1)
- EX0406Document3 pagesEX0406igualdi53No ratings yet
- EX0404Document3 pagesEX0404igualdi53No ratings yet
- EX0304Document2 pagesEX0304igualdi53No ratings yet
- Trigonometry and LogarithmDocument8 pagesTrigonometry and LogarithmbjNo ratings yet
- Torsional Stress and Double IntegrationDocument12 pagesTorsional Stress and Double IntegrationMr. DummyNo ratings yet
- Solution To Problem 648 - Deflection of Cantilever Beams - Strength of Materials ReviewDocument4 pagesSolution To Problem 648 - Deflection of Cantilever Beams - Strength of Materials ReviewJhundel Factor PajarillagaNo ratings yet
- Solution of MechanismDocument6 pagesSolution of MechanismMehmet Ali GökkaplanNo ratings yet
- Shear Forces and Bending Moments BasicsDocument12 pagesShear Forces and Bending Moments Basicslokesh pgNo ratings yet
- Shear Forces and Bending MomentsDocument12 pagesShear Forces and Bending MomentsƏli KərimovNo ratings yet
- Shear Forces and Bending MomentsDocument12 pagesShear Forces and Bending MomentsAbrian SistianNo ratings yet
- Ansys ShapeoptDocument10 pagesAnsys Shapeoptapi-3833671No ratings yet
- Log-Log PlotsDocument22 pagesLog-Log PlotsFedericoNo ratings yet
- EX0405Document3 pagesEX0405igualdi53No ratings yet
- Lab No. 5 Vector MeasurementsDocument14 pagesLab No. 5 Vector Measurementsmihaela0chiorescuNo ratings yet
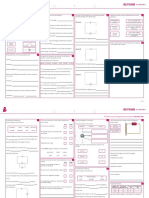
- Continuous and Indeterminate Beams - Ali - MammadovDocument19 pagesContinuous and Indeterminate Beams - Ali - MammadovAli MammadovNo ratings yet
- Paper SAT Test 1Document21 pagesPaper SAT Test 1academicteam.materialsNo ratings yet
- Class Test - 2016: Civil EngineeringDocument11 pagesClass Test - 2016: Civil EngineeringabhishekNo ratings yet
- Curved BeamsDocument19 pagesCurved BeamsMohammed GamNo ratings yet
- Example 3-2B Shear and Moment Diagrams of A Simply Supported Beam Using Singularity FunctionsDocument3 pagesExample 3-2B Shear and Moment Diagrams of A Simply Supported Beam Using Singularity FunctionsCris M Rodríguez BNo ratings yet
- Problem 705 - Solution of Propped Beam With Increasing Load - Strength of Materials ReviewDocument5 pagesProblem 705 - Solution of Propped Beam With Increasing Load - Strength of Materials Reviewindrajit sodhaNo ratings yet
- Loglog Equation For HurstDocument22 pagesLoglog Equation For HurstManuel HerreraNo ratings yet
- DeflectionDocument58 pagesDeflectionMohammad TahaNo ratings yet
- Transport Phenomena: Notes For The 2nd Revised Edition of by R. B. Bird, W. E. Stewart, and E. N. LightfootDocument140 pagesTransport Phenomena: Notes For The 2nd Revised Edition of by R. B. Bird, W. E. Stewart, and E. N. LightfootAlexShearNo ratings yet
- BSL NotesDocument140 pagesBSL NotesRashaM.AtwiNo ratings yet
- Circular SlabsDocument4 pagesCircular Slabsomar.98.sofan2No ratings yet
- Moment Diagram by PartsDocument14 pagesMoment Diagram by PartsJay Dela CruzNo ratings yet
- OSM TM 4A02 e Ex2ADocument8 pagesOSM TM 4A02 e Ex2A林俊佑No ratings yet
- HW 4 SolutionDocument5 pagesHW 4 Solutionneha patelNo ratings yet
- Static of RIGID BODIES PART-2Document30 pagesStatic of RIGID BODIES PART-2Eyaa AsuncionNo ratings yet
- HW 4 Solution PDFDocument5 pagesHW 4 Solution PDFyesNo ratings yet
- Assignment 3Document6 pagesAssignment 3amayrakhurrana18No ratings yet
- UntitledDocument7 pagesUntitledSuryanshu BhardwajNo ratings yet
- GCE 1 MathmaticsDocument52 pagesGCE 1 MathmaticsMOHAMED MOSAADNo ratings yet
- Documents: Search Books, Presentations, Business, Academics..Document16 pagesDocuments: Search Books, Presentations, Business, Academics..nittvasanthNo ratings yet
- QM-2 Solved ProblemsDocument17 pagesQM-2 Solved ProblemsHenock TadeleNo ratings yet
- 10 Shortest Paths in Graphs 3 Bellman FordDocument100 pages10 Shortest Paths in Graphs 3 Bellman FordRanveer SinghaniyaNo ratings yet
- Transport Phenomena Addictional NotesDocument119 pagesTransport Phenomena Addictional NotesDaood Hussainali100% (1)
- All South Jee Ma Nurture Ph12 Allen Common Testpaper1 97526 Test PDF Ac1ku14pqzDocument14 pagesAll South Jee Ma Nurture Ph12 Allen Common Testpaper1 97526 Test PDF Ac1ku14pqznihalbolla2023No ratings yet
- Chapter 4 Spring 2021Document28 pagesChapter 4 Spring 2021Mahmoud Ahmed TawfikNo ratings yet
- L XK Ileprtmmt: Udver Fo DapplhdDocument4 pagesL XK Ileprtmmt: Udver Fo DapplhdGnanasegaran RishiNo ratings yet
- Eegr3523 Mechatronics Homework Sets Assigned in The Spring Semester of 2019Document28 pagesEegr3523 Mechatronics Homework Sets Assigned in The Spring Semester of 2019Khaled AlshurmanNo ratings yet
- Mes Lab 1Document17 pagesMes Lab 1aidaNo ratings yet
- New Doc Oct 31, 2023 20.23Document3 pagesNew Doc Oct 31, 2023 20.23tasveenm5No ratings yet
- Fall 2012 - EE423 Final ExamDocument1 pageFall 2012 - EE423 Final ExamAqNo ratings yet
- Vectorspacesunit 2ppt 201129154737Document37 pagesVectorspacesunit 2ppt 201129154737tongtonghoanghaiNo ratings yet
- Test Series Full Test-2332002Document11 pagesTest Series Full Test-2332002Mayank KoshtaNo ratings yet
- Vector CalculusDocument7 pagesVector CalculusAKNo ratings yet
- Problem Set 0Document2 pagesProblem Set 0Toby ChengNo ratings yet
- 2 10 10 8 3 11 11 MergedDocument8 pages2 10 10 8 3 11 11 Mergedyanewo5099No ratings yet
- CASE1BDocument3 pagesCASE1Bigualdi53No ratings yet
- CASE2ADocument3 pagesCASE2Aigualdi53No ratings yet
- EX1003Document2 pagesEX1003igualdi53No ratings yet
- EX1001Document7 pagesEX1001igualdi53No ratings yet
- EX1604Document3 pagesEX1604igualdi53No ratings yet
- EX1504Document3 pagesEX1504igualdi53No ratings yet
- EX1602Document1 pageEX1602igualdi53No ratings yet
- EX1605Document2 pagesEX1605igualdi53No ratings yet
- EX1603Document2 pagesEX1603igualdi53No ratings yet
- Stress PlotDocument12 pagesStress Plotigualdi53No ratings yet
- D 7152 - 11 (2016)Document9 pagesD 7152 - 11 (2016)Ippolito Gualdi100% (1)
- Transmission Par EngrenageDocument7 pagesTransmission Par Engrenageigualdi53No ratings yet
- Standard DeviationDocument22 pagesStandard DeviationPriya VermaNo ratings yet
- USR-GPRS232-730 Guide LineDocument18 pagesUSR-GPRS232-730 Guide LineKutu BukuNo ratings yet
- ABO American Board of Orthodontics 2013-CALIBRATION-KIT PDFDocument63 pagesABO American Board of Orthodontics 2013-CALIBRATION-KIT PDFEryson Thiago PradoNo ratings yet
- Corona RT 46 164 SimpleDocument94 pagesCorona RT 46 164 SimpleRimbert100% (1)
- CS NoteDocument51 pagesCS Notesmita satpathyNo ratings yet
- Technicalproposal: For 750kva Substation EquipmentDocument4 pagesTechnicalproposal: For 750kva Substation EquipmentHarun MohamodNo ratings yet
- FMM - Unit I QBDocument43 pagesFMM - Unit I QBThiruvasagamoorthy KaNo ratings yet
- Define Load PatternDocument4 pagesDefine Load PatternsovannchhoemNo ratings yet
- Automation in Material Handling System at Site: By: Varun Babbar Abhishek Arora Sombudhha DuttaDocument13 pagesAutomation in Material Handling System at Site: By: Varun Babbar Abhishek Arora Sombudhha Duttaशर्मा अविनाशNo ratings yet
- Easa Part66 Module 01 New Part 2Document11 pagesEasa Part66 Module 01 New Part 2el farissi farisNo ratings yet
- Bubba OscillatorDocument7 pagesBubba OscillatorUmairRashidNo ratings yet
- Spatial Resilience in Social Economic System - CummingDocument268 pagesSpatial Resilience in Social Economic System - CummingieromerosaNo ratings yet
- P HashDocument3 pagesP HashachimedesxNo ratings yet
- Calculate InflationDocument2 pagesCalculate InflationNafees AhmadNo ratings yet
- How To Turn Your TP Link TL-WRT740N Router Into A Fully Functional One Using OpenWRT PhobosK's BlogDocument25 pagesHow To Turn Your TP Link TL-WRT740N Router Into A Fully Functional One Using OpenWRT PhobosK's BlogpedjavgdNo ratings yet
- Soal UTS Bahasa Inggris SD Semester Genap Kelas 5Document5 pagesSoal UTS Bahasa Inggris SD Semester Genap Kelas 5Yusuf HamdaniNo ratings yet
- Hydraulic Components and SystemsDocument157 pagesHydraulic Components and SystemsFernando TezzaNo ratings yet
- Chapter 17 - FatigueDocument26 pagesChapter 17 - FatigueSumit BabbarNo ratings yet
- Underground SurveyingDocument5 pagesUnderground SurveyingErick AlanNo ratings yet
- Waiting Line ManagementDocument25 pagesWaiting Line ManagementSomdipta Maity100% (1)
- K To 12 Welding Learning Module PDFDocument139 pagesK To 12 Welding Learning Module PDFAlano JoNo ratings yet
- Friendshapes: by M Komathi Wai Lai YeeDocument23 pagesFriendshapes: by M Komathi Wai Lai YeedaveferalNo ratings yet
- Taxonomy v101Document67 pagesTaxonomy v101Angela BernalNo ratings yet
- Transmision Automatica 4L60Document109 pagesTransmision Automatica 4L60Jesus Maria LizarzabalNo ratings yet
- Limit States Design of Crane Runway GirdersDocument7 pagesLimit States Design of Crane Runway GirdersRatna YanuarNo ratings yet
- Force and Motion: ESCI 101 (Physics For Engineers)Document16 pagesForce and Motion: ESCI 101 (Physics For Engineers)Irine ConstantinoNo ratings yet
- Optan Ball Lens 052920Document7 pagesOptan Ball Lens 052920lenaNo ratings yet
- Unit 2 Math PathDocument9 pagesUnit 2 Math Pathapi-454472895No ratings yet