Download as pdf or txt
You might also like
- The Cloud Resume Challenge Cookbook - Azure EdDocument209 pagesThe Cloud Resume Challenge Cookbook - Azure EdMani Shankar RajanNo ratings yet
- G11 Lesson 02 Essay 1Document3 pagesG11 Lesson 02 Essay 1Tinet Sri UdawelaNo ratings yet
- Gpon Olt Fhl2100 v2.1.0 Cli Manual r01Document783 pagesGpon Olt Fhl2100 v2.1.0 Cli Manual r01Jorge Gonzales33% (3)
- Geometry-Based Distance Decomposition For Monocular 3D Object DetectionDocument12 pagesGeometry-Based Distance Decomposition For Monocular 3D Object Detectioncheng pengNo ratings yet
- 3D Bounding Box Estimation Using Deep Learning and GeometryDocument10 pages3D Bounding Box Estimation Using Deep Learning and GeometryNguyễn Thành TínNo ratings yet
- Posecnn: A Convolutional Neural Network For 6D Object Pose Estimation in Cluttered ScenesDocument10 pagesPosecnn: A Convolutional Neural Network For 6D Object Pose Estimation in Cluttered ScenesAnhNguyễnNo ratings yet
- Monorun: Monocular 3D Object Detection by Reconstruction and Uncertainty PropagationDocument13 pagesMonorun: Monocular 3D Object Detection by Reconstruction and Uncertainty Propagationcheng pengNo ratings yet
- Know Your Neighbors: Improving Single-View Reconstruction Via Spatial Vision-Language ReasoningDocument11 pagesKnow Your Neighbors: Improving Single-View Reconstruction Via Spatial Vision-Language Reasoningmariellarizoser87No ratings yet
- Monocular Depth Estimation Based On Deep Learning: An OverviewDocument14 pagesMonocular Depth Estimation Based On Deep Learning: An OverviewSomya swarya naikNo ratings yet
- A Deep Neural Network Combined CNN and GCN For Remote Sensing Scene ClassificationDocument14 pagesA Deep Neural Network Combined CNN and GCN For Remote Sensing Scene ClassificationJosé Alberto Martínez HernándezNo ratings yet
- Spatial Pyramid Pooling in Deep Convolutional Networks For Visual RecognitionDocument14 pagesSpatial Pyramid Pooling in Deep Convolutional Networks For Visual RecognitionAshraf Haroon RashidNo ratings yet
- Unified Monocular 3D Object DetectionDocument10 pagesUnified Monocular 3D Object DetectionClark RenNo ratings yet
- Sajjadi 2022 NeuripsDocument18 pagesSajjadi 2022 NeuripsYan AecNo ratings yet
- Cite 466 UnitBox An Advanced Object Detection Network ACM M 2016Document5 pagesCite 466 UnitBox An Advanced Object Detection Network ACM M 2016姜华为No ratings yet
- Monocular 3D Object Detection and Box Fitting Trained End-to-End Using Intersection-over-Union LossDocument10 pagesMonocular 3D Object Detection and Box Fitting Trained End-to-End Using Intersection-over-Union Losscheng pengNo ratings yet
- Developmental Stereo Emergence of Disparity Preference in Models of The Visual Cortex-ujBDocument15 pagesDevelopmental Stereo Emergence of Disparity Preference in Models of The Visual Cortex-ujBmohmmaed khalidNo ratings yet
- Song 2022 CVPRDocument22 pagesSong 2022 CVPRYan AecNo ratings yet
- PV-RCNN++: Point-Voxel Feature Set Abstraction With Local Vector Representation For 3D Object DetectionDocument17 pagesPV-RCNN++: Point-Voxel Feature Set Abstraction With Local Vector Representation For 3D Object DetectionnaveenNo ratings yet
- Unsupervised Change DetectionDocument8 pagesUnsupervised Change Detectiondeekshadeeku550No ratings yet
- TransFusion Robust LiDAR-Camera Fusion For 3D Object Detection With TransformersDocument10 pagesTransFusion Robust LiDAR-Camera Fusion For 3D Object Detection With Transformerseduardoobatista2015No ratings yet
- Sensors 22 04742Document21 pagesSensors 22 04742amo antonyNo ratings yet
- 3D Shape Analysis Using The CNNDocument6 pages3D Shape Analysis Using The CNNhsisjNo ratings yet
- Point-Trajectory Transformer For Efficient Temporal 3D Object DetectionDocument10 pagesPoint-Trajectory Transformer For Efficient Temporal 3D Object DetectionClark RenNo ratings yet
- Motion Guided 3D Pose Estimation From VideosDocument19 pagesMotion Guided 3D Pose Estimation From VideosSai Prasad SarangiNo ratings yet
- 2019-Deep Optics For Monocular Depth Estimation and 3D Object DetectionDocument10 pages2019-Deep Optics For Monocular Depth Estimation and 3D Object Detectioncynorr rainNo ratings yet
- Large Selective Kernel Network For Remote Sensing Object DetectionDocument16 pagesLarge Selective Kernel Network For Remote Sensing Object Detectionkenan suleymanNo ratings yet
- Raynet: Learning Volumetric 3D Reconstruction With Ray PotentialsDocument10 pagesRaynet: Learning Volumetric 3D Reconstruction With Ray PotentialsIgnacio VizzoNo ratings yet
- Sitzmann 2020 CVPRDocument23 pagesSitzmann 2020 CVPRYan AecNo ratings yet
- S2R-Depthnet: Learning A Generalizable Depth-Specific Structural RepresentationDocument13 pagesS2R-Depthnet: Learning A Generalizable Depth-Specific Structural RepresentationfffffNo ratings yet
- Representations of Human Faces: Ax-Lanck - Nstitut Für Biologische KybernetikDocument12 pagesRepresentations of Human Faces: Ax-Lanck - Nstitut Für Biologische KybernetikNiko TrojeNo ratings yet
- Monocular Depth Estimation Based On Deep Learning An OverviewDocument16 pagesMonocular Depth Estimation Based On Deep Learning An OverviewJ SpencerNo ratings yet
- PV-RCNN: Point-Voxel Feature Set Abstraction For 3D Object DetectionDocument11 pagesPV-RCNN: Point-Voxel Feature Set Abstraction For 3D Object DetectionnaveenNo ratings yet
- Object Recognition From Local Scale-Invariant FeaturesDocument8 pagesObject Recognition From Local Scale-Invariant Featuressiva shankaranNo ratings yet
- Cvxnet:: Learnable Convex DecompositionDocument14 pagesCvxnet:: Learnable Convex DecompositionArockia MariaNo ratings yet
- Differential Angular Imaging For Material RecognitionDocument10 pagesDifferential Angular Imaging For Material RecognitionBaby BooNo ratings yet
- He Bi-Directional Cascade Network For Perceptual Edge Detection CVPR 2019 PaperDocument10 pagesHe Bi-Directional Cascade Network For Perceptual Edge Detection CVPR 2019 PaperJan KristantoNo ratings yet
- 2104 00680 PDFDocument10 pages2104 00680 PDFmarko CavdarNo ratings yet
- Pointwise Convolutional Neural NetworksDocument10 pagesPointwise Convolutional Neural NetworkscuimosemailNo ratings yet
- Clasificación de Escenas de Imágenes de TeledetecciónDocument22 pagesClasificación de Escenas de Imágenes de TeledetecciónAlexcondzoNo ratings yet
- Rendernet: A Deep Convolutional Network For Differentiable Rendering From 3D ShapesDocument17 pagesRendernet: A Deep Convolutional Network For Differentiable Rendering From 3D ShapesAyhan MUCURNo ratings yet
- Deep Dual Consecutive Network For Human Pose EstimationDocument10 pagesDeep Dual Consecutive Network For Human Pose Estimation张洋No ratings yet
- Multiscale Visual Attention Networks For Object Detection in VHR Remote Sensing ImagesDocument5 pagesMultiscale Visual Attention Networks For Object Detection in VHR Remote Sensing ImagesMinh Đinh NhậtNo ratings yet
- Segmentation-Aware Convolutional Networks Using Local Attention MasksDocument11 pagesSegmentation-Aware Convolutional Networks Using Local Attention Masksagrpa15No ratings yet
- Kpconv: Flexible and Deformable Convolution For Point CloudsDocument10 pagesKpconv: Flexible and Deformable Convolution For Point CloudscuimosemailNo ratings yet
- 1604 00449 PDFDocument17 pages1604 00449 PDF王王金强No ratings yet
- Wu, Gu Et Al 2022 - PV-RCNN++ Semantical Point-Voxel Feature Interaction For 3D Object DetectionDocument16 pagesWu, Gu Et Al 2022 - PV-RCNN++ Semantical Point-Voxel Feature Interaction For 3D Object DetectionbishNo ratings yet
- FastPillars A Deployment-Friendly Pillar-Based 3D DetectorDocument13 pagesFastPillars A Deployment-Friendly Pillar-Based 3D Detector姜峰No ratings yet
- A Transfer Function Design Using A Knowledge Database Based On Deep Image and Primitive Intensity Profile Features RetrievalDocument12 pagesA Transfer Function Design Using A Knowledge Database Based On Deep Image and Primitive Intensity Profile Features RetrievalabcdNo ratings yet
- Unsupervised Loop ClosureDocument10 pagesUnsupervised Loop ClosureGeorge PachitariuNo ratings yet
- PCPN Learning Local Shape Properties From Raw Point Clouds: University College London LIX, École Polytechnique, CNRSDocument11 pagesPCPN Learning Local Shape Properties From Raw Point Clouds: University College London LIX, École Polytechnique, CNRSSagar BhogarajuNo ratings yet
- 7146 Do Deep Neural Networks Suffer From CrowdingDocument11 pages7146 Do Deep Neural Networks Suffer From CrowdingConorNo ratings yet
- Xu DisCoScene Spatially Disentangled Generative Radiance Fields For Controllable 3D-Aware Scene CVPR 2023 PaperDocument11 pagesXu DisCoScene Spatially Disentangled Generative Radiance Fields For Controllable 3D-Aware Scene CVPR 2023 PaperS Divakar BhatNo ratings yet
- Mescheder Occupancy Networks Learning 3D Reconstruction in Function Space CVPR 2019 PaperDocument11 pagesMescheder Occupancy Networks Learning 3D Reconstruction in Function Space CVPR 2019 PaperQinan ZhangNo ratings yet
- A Review of Semantic Segmentation Using Deep Neural NetworksDocument7 pagesA Review of Semantic Segmentation Using Deep Neural NetworksMatiur Rahman MinarNo ratings yet
- Remote Sensing Image Change Detection With TransformersDocument14 pagesRemote Sensing Image Change Detection With Transformerszheng wangNo ratings yet
- 3D Bounding Box Estimation For Autonomous Vehicles by Cascaded Geometric Constraints and Depurated 2D Detections Using 3D ResultsDocument11 pages3D Bounding Box Estimation For Autonomous Vehicles by Cascaded Geometric Constraints and Depurated 2D Detections Using 3D Resultscheng pengNo ratings yet
- Li Large Selective Kernel Network For Remote Sensing Object Detection ICCV 2023 PaperDocument12 pagesLi Large Selective Kernel Network For Remote Sensing Object Detection ICCV 2023 PaperNetwork InfoNo ratings yet
- Fusing Concurrent Orthogonal Wide-Aperture Sonar Images For Dense Underwater 3D ReconstructionDocument8 pagesFusing Concurrent Orthogonal Wide-Aperture Sonar Images For Dense Underwater 3D ReconstructionVincent WenNo ratings yet
- Adequate Reconstruction of Transparent Objects On A Shoestring BudgetDocument8 pagesAdequate Reconstruction of Transparent Objects On A Shoestring Budget会爆炸的小米NoteNo ratings yet
- Decoding The Moons Surface A Graph Neural Network Based Analysis of Chandrayaan-2 Lunar Data ClassificationDocument4 pagesDecoding The Moons Surface A Graph Neural Network Based Analysis of Chandrayaan-2 Lunar Data ClassificationShaik AyeshaNo ratings yet
- Saliency Detection by Multi-Context Deep LearningDocument10 pagesSaliency Detection by Multi-Context Deep Learningsiva shankaranNo ratings yet
- A Failure To Learn Object Shape Geometry: Implications For Convolutional Neural Networks As Plausible Models of Biological VisionDocument12 pagesA Failure To Learn Object Shape Geometry: Implications For Convolutional Neural Networks As Plausible Models of Biological Visionnatra2k2No ratings yet
- Sampling From Convex Sets With A Cold Start Using Multiscale DecompositionsDocument53 pagesSampling From Convex Sets With A Cold Start Using Multiscale DecompositionsMani Shankar RajanNo ratings yet
- Constructions of Optical Queues With A Limited Number of Recirculations-Part I: Greedy ConstructionsDocument59 pagesConstructions of Optical Queues With A Limited Number of Recirculations-Part I: Greedy ConstructionsMani Shankar RajanNo ratings yet
- Blue Yonder - End To End Supply Chain Operating SystemDocument57 pagesBlue Yonder - End To End Supply Chain Operating SystemMani Shankar RajanNo ratings yet
- Banala's Wedding InvitationDocument4 pagesBanala's Wedding InvitationMani Shankar RajanNo ratings yet
- New Salary Structure - Apr 2024Document2 pagesNew Salary Structure - Apr 2024Mani Shankar RajanNo ratings yet
- Zabbix Training Day 3 PresentationDocument15 pagesZabbix Training Day 3 PresentationMani Shankar RajanNo ratings yet
- Geometry LabsDocument266 pagesGeometry LabsMani Shankar RajanNo ratings yet
- Annual Health Check Claim FormDocument1 pageAnnual Health Check Claim FormMani Shankar RajanNo ratings yet
- Bridging Unit - Further MathsDocument3 pagesBridging Unit - Further MathsMani Shankar RajanNo ratings yet
- Language Guide v2.5 MAINDocument29 pagesLanguage Guide v2.5 MAINMani Shankar RajanNo ratings yet
- Kasi Tour 2023 ProgramDocument4 pagesKasi Tour 2023 ProgramMani Shankar RajanNo ratings yet
- The Cloud Resume Challenge Cookbook GCP EditionDocument212 pagesThe Cloud Resume Challenge Cookbook GCP EditionMani Shankar Rajan100% (1)
- CASA Glass Film Cover - VOL-1 - Final PDFDocument83 pagesCASA Glass Film Cover - VOL-1 - Final PDFMani Shankar RajanNo ratings yet
- Claims - Process ManualDocument2 pagesClaims - Process ManualMani Shankar RajanNo ratings yet
- Reading-and-Writing Q3 W4Document20 pagesReading-and-Writing Q3 W4Rose RepuestoNo ratings yet
- DX DiagDocument32 pagesDX DiagHarshil PatelNo ratings yet
- Ultimate Pit Design Using Surpac: Mentored ByDocument40 pagesUltimate Pit Design Using Surpac: Mentored ByjunaifaNo ratings yet
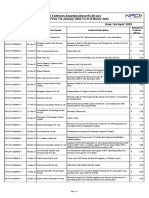
- All Contract Awarded Above 50 Lacs 01012023 31032023Document2 pagesAll Contract Awarded Above 50 Lacs 01012023 31032023Apurva ModyNo ratings yet
- CCNA 7.0 DRAFT Scope and Sequence: Target AudienceDocument20 pagesCCNA 7.0 DRAFT Scope and Sequence: Target AudienceERNESTO TORRES RUIZNo ratings yet
- Design of Tsunami Detector Based Sort Message Service Using ArduinoDocument13 pagesDesign of Tsunami Detector Based Sort Message Service Using ArduinoMeila SariNo ratings yet
- INFINIUM CatalogDocument20 pagesINFINIUM Catalogari kurniawanNo ratings yet
- Crowdsourcing and Social Engagement:: Potential, Power and Freedom For Libraries and UsersDocument73 pagesCrowdsourcing and Social Engagement:: Potential, Power and Freedom For Libraries and Usersjaypee pengNo ratings yet
- Scale Your Alfresco Solutions - Architecture, Design and Tuning Best PracticesDocument90 pagesScale Your Alfresco Solutions - Architecture, Design and Tuning Best PracticesjavieralfayaNo ratings yet
- Final Report SAMPLEDocument36 pagesFinal Report SAMPLEmumarNo ratings yet
- Cyberfeminism Kate Mondloch The Johns Hopkins Guide To Digital Media 2014 PP 107 109Document3 pagesCyberfeminism Kate Mondloch The Johns Hopkins Guide To Digital Media 2014 PP 107 109Diana OvallesNo ratings yet
- Resume Ivan O.SDocument1 pageResume Ivan O.SsasNo ratings yet
- Pws 3261Document2 pagesPws 3261api-2832781920% (1)
- Requirements ModelingDocument39 pagesRequirements ModelingDeshnu SudeepNo ratings yet
- Accident Detection and Warning SystemDocument4 pagesAccident Detection and Warning SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- How To Use SUPA Tool For Tomcat MeasurementsDocument8 pagesHow To Use SUPA Tool For Tomcat MeasurementsGurushantha DoddamaniNo ratings yet
- Chapter6 - Test BankDocument4 pagesChapter6 - Test BankbusatiNo ratings yet
- Improving Construction Safety Using BimDocument9 pagesImproving Construction Safety Using BimpisalNo ratings yet
- Installation of Hardware Components and Other PeripheralsDocument3 pagesInstallation of Hardware Components and Other PeripheralsIan Clyde Torio100% (3)
- LaplaceTransform and System StabilityDocument30 pagesLaplaceTransform and System Stabilityhamza abdo mohamoudNo ratings yet
- IT Governance Mechanisms in Managing IT Business VDocument11 pagesIT Governance Mechanisms in Managing IT Business VRaluca UrseNo ratings yet
- JBE Maintenance PDFDocument14 pagesJBE Maintenance PDFSamwel MmariNo ratings yet
- Hash InstructionsDocument6 pagesHash InstructionsILove HumanityNo ratings yet
- Journal Terra SentiaDocument18 pagesJournal Terra SentiaJoao Henrique AlessioNo ratings yet
- Modern Myths - Shortcomings in Scientific WritingDocument77 pagesModern Myths - Shortcomings in Scientific WritingLi ChNo ratings yet
- Software For Computing Statistical Intervals: Table 1Document2 pagesSoftware For Computing Statistical Intervals: Table 1Edwin Johny Asnate SalazarNo ratings yet
- Plagiarism in ProfessionalismDocument8 pagesPlagiarism in ProfessionalismRyan EnriquezNo ratings yet
- Final Digital Forensic Small Devices ReportDocument21 pagesFinal Digital Forensic Small Devices ReportMithilesh PatelNo ratings yet