Download as pdf or txt
You might also like
- Mass Spring Damper SystemDocument2 pagesMass Spring Damper SystemDivya Bharathi SNo ratings yet
- Lab # 6 Time Response AnalysisDocument10 pagesLab # 6 Time Response AnalysisFahad AneebNo ratings yet
- StabilityDocument16 pagesStabilitythankamonyNo ratings yet
- ALD Additive Manufacturing VIGA-EIGA Broschure-1 PDFDocument4 pagesALD Additive Manufacturing VIGA-EIGA Broschure-1 PDFVenkateswaran KrishnamurthyNo ratings yet
- 8-Test Input Signal Transient and Steady-State Response of 1st Abd 2nd Order SystemsDocument32 pages8-Test Input Signal Transient and Steady-State Response of 1st Abd 2nd Order SystemsAzhar AliNo ratings yet
- Higher Order Systems Second Order SystemsDocument13 pagesHigher Order Systems Second Order SystemsZeus OlympusNo ratings yet
- 1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Document99 pages1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Amandeep SinghNo ratings yet
- STRC201 Sdof JMWB PDFDocument99 pagesSTRC201 Sdof JMWB PDFAkash ChandraNo ratings yet
- What Is A Second-Order System?: F (T) WD Y G DT C Dy DT KYDocument8 pagesWhat Is A Second-Order System?: F (T) WD Y G DT C Dy DT KYCarmela HaliliNo ratings yet
- C2 Sdof2 PDFDocument20 pagesC2 Sdof2 PDFArThur BangunNo ratings yet
- Systems ClassDocument53 pagesSystems ClassBhetariya PareshNo ratings yet
- Assignment Control SystemDocument5 pagesAssignment Control SystemSaiNo ratings yet
- 01 IntroDocument28 pages01 Introsouvik5000No ratings yet
- Control Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Document184 pagesControl Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Adel AdenaneNo ratings yet
- CH 2Document32 pagesCH 2HFNo ratings yet
- Stability AnalysisDocument28 pagesStability AnalysisRamaDinakaranNo ratings yet
- Mechanical Engineering Mechanical-Vibrations Forced-Vibrations NotesDocument51 pagesMechanical Engineering Mechanical-Vibrations Forced-Vibrations NotesAbhishek MishraNo ratings yet
- S&S - Week 7Document20 pagesS&S - Week 7machasong98No ratings yet
- Assignment 1Document4 pagesAssignment 1Ashish KushwahaNo ratings yet
- Stability 2004Document4 pagesStability 2004andrestomasNo ratings yet
- Transform Analysis of LTI SystemsDocument62 pagesTransform Analysis of LTI Systemshakkem bNo ratings yet
- Linear State FeedbackDocument3 pagesLinear State FeedbackRehman SaleemNo ratings yet
- Lecture 2 - ME2617 Free Motion of Damped SystemsDocument33 pagesLecture 2 - ME2617 Free Motion of Damped SystemsHamzah QadriNo ratings yet
- Free Vibration of Single-Degree-Of-freedom SystemsDocument7 pagesFree Vibration of Single-Degree-Of-freedom SystemsShafiq ShajaNo ratings yet
- 6 - Time Response Analysis 2Document21 pages6 - Time Response Analysis 2حساب ويندوزNo ratings yet
- Transient-Response Analysis and Steady-State Error Analysis 1. DefinitionsDocument4 pagesTransient-Response Analysis and Steady-State Error Analysis 1. Definitionsprica_adrianNo ratings yet
- Automatic Control ExercisesDocument183 pagesAutomatic Control ExercisesFrancesco Vasturzo100% (1)
- System PrototypesDocument29 pagesSystem PrototypesYgor AguiarNo ratings yet
- Chapter 2: Introduction To Damping in Free and Forced VibrationsDocument10 pagesChapter 2: Introduction To Damping in Free and Forced Vibrationsmanindra haldarNo ratings yet
- Chapter4 Description of Systems - MenosDocument29 pagesChapter4 Description of Systems - MenosSergioCandiottiNo ratings yet
- STRC201 Sdof JMWBDocument99 pagesSTRC201 Sdof JMWBJura PateregaNo ratings yet
- Vibration AnalysisDocument18 pagesVibration AnalysisSangolla NarahariNo ratings yet
- Notes Installment 1Document21 pagesNotes Installment 1amitshukla.iitkNo ratings yet
- Department of Electromechanical Engineering Course Title: Control SystemDocument25 pagesDepartment of Electromechanical Engineering Course Title: Control SystemYidersal MarewNo ratings yet
- 02 - Steady Modes and Sliding FP12 450 Modes in The Relay Control Systems With Time DelayDocument6 pages02 - Steady Modes and Sliding FP12 450 Modes in The Relay Control Systems With Time Delayjap_thaygor5925No ratings yet
- 10 EMI 09 System StabilityDocument25 pages10 EMI 09 System Stabilityapi-3707706No ratings yet
- Tutorial 5Document2 pagesTutorial 5Gaurav ANo ratings yet
- EEET2197 Tute2Document2 pagesEEET2197 Tute2Collin lcwNo ratings yet
- Tutorial 5 Dynamics of Second Order SystemsDocument19 pagesTutorial 5 Dynamics of Second Order Systemsfaraha2406No ratings yet
- MCEN3005 Lecture 6 NotesDocument17 pagesMCEN3005 Lecture 6 NotesDileeka DiyabalanageNo ratings yet
- Stability of Hybrid Systems Using A Sum of Squares Programming Approach: VCCR System ExampleDocument13 pagesStability of Hybrid Systems Using A Sum of Squares Programming Approach: VCCR System ExampleMichael ChenNo ratings yet
- Control Systems Presentation - 3Document45 pagesControl Systems Presentation - 3soumikchatterjee1912No ratings yet
- Undamped Free Vibration of Single Dof Systems: Dr.B.Santhosh Department of Mechanical EngineeringDocument3 pagesUndamped Free Vibration of Single Dof Systems: Dr.B.Santhosh Department of Mechanical EngineeringSREENATH S.SNo ratings yet
- Week 4Document55 pagesWeek 4Raising StarNo ratings yet
- UCH1603 Process Dynamics and Control: Second Order SystemsDocument15 pagesUCH1603 Process Dynamics and Control: Second Order SystemsRoyalcar AccessoriesNo ratings yet
- Disturbance Rejection and Noise Attenuation:: Control 1, Second MaterialDocument5 pagesDisturbance Rejection and Noise Attenuation:: Control 1, Second MaterialKaram AlmasriNo ratings yet
- 4.SDOF Systems in Free VibrationDocument5 pages4.SDOF Systems in Free VibrationshamshiriNo ratings yet
- Forced-Vibration Response: Forced - Vibration Harmonic Loading Periodic Loading Impulsive Loading General Dynamic LoadingDocument15 pagesForced-Vibration Response: Forced - Vibration Harmonic Loading Periodic Loading Impulsive Loading General Dynamic LoadingChí Khang ĐặngNo ratings yet
- Adaptive l1 Robust Control For SISO SystemsDocument15 pagesAdaptive l1 Robust Control For SISO SystemshamhmsNo ratings yet
- Experiment A1 - Vibration Absorber - AR Copy September2008Document12 pagesExperiment A1 - Vibration Absorber - AR Copy September2008Pawan Kumar YadavNo ratings yet
- Week#06Document39 pagesWeek#06Yahya MateenNo ratings yet
- Examples Mode ShapesDocument1 pageExamples Mode Shapesjimawsd569No ratings yet
- C3 Forced Vibration BGDocument11 pagesC3 Forced Vibration BGLâm KhanhNo ratings yet
- pw2 SolDocument10 pagespw2 Soltwee tomasNo ratings yet
- Second Order SystemsDocument30 pagesSecond Order SystemsMansi NanavatiNo ratings yet
- Harmonic OscDocument5 pagesHarmonic Oscbob panNo ratings yet
- CE511 Arbitrary ForceDocument18 pagesCE511 Arbitrary ForceKala J PrasadNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Harnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingFrom EverandHarnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingNo ratings yet
- Thermoelectric Generator: Chandan Gauda REGD NO: 1701219010 Electronics and Tele-Communication EngineeringDocument24 pagesThermoelectric Generator: Chandan Gauda REGD NO: 1701219010 Electronics and Tele-Communication EngineeringDebasis Meher0% (1)
- Pin Mux Utility For ARM MPU Processors - Texas Instruments WikiDocument24 pagesPin Mux Utility For ARM MPU Processors - Texas Instruments WikiKuldeep KushwahaNo ratings yet
- Introduction To Z-Wave and OpenzwaveDocument41 pagesIntroduction To Z-Wave and OpenzwaveAdwaith SajeevNo ratings yet
- BCAoct09 (52-69)Document117 pagesBCAoct09 (52-69)errum_shraddhaNo ratings yet
- DD Env 12018-1998Document96 pagesDD Env 12018-1998Виктор ИсакNo ratings yet
- 3D SEARCHING IntroductionDocument3 pages3D SEARCHING IntroductionGitanjaliNo ratings yet
- 3.2.9. Rubber Closures For Containers For Aqueous Parenteral Preparations, For Powders and For Freeze-Dried PowdersDocument2 pages3.2.9. Rubber Closures For Containers For Aqueous Parenteral Preparations, For Powders and For Freeze-Dried PowdersG_RanjithNo ratings yet
- Batangas State UniversityDocument4 pagesBatangas State UniversitychrstnmrsgnNo ratings yet
- Organic Chemistry PDFDocument40 pagesOrganic Chemistry PDFMax SinghNo ratings yet
- Example of Calculation of Standard Deviation For A Set of 20 Concrete Cube Test ResultsDocument2 pagesExample of Calculation of Standard Deviation For A Set of 20 Concrete Cube Test Resultsamar sharmaNo ratings yet
- Most Out of Your Scope: 6 Oscilloscope Tricks To Get TheDocument20 pagesMost Out of Your Scope: 6 Oscilloscope Tricks To Get TheJhon Fredy Diaz CorreaNo ratings yet
- Azure InterviewDocument4 pagesAzure InterviewsatishNo ratings yet
- IUPAC Provisional Recommendations: Table VII Ligand AbbreviationsDocument12 pagesIUPAC Provisional Recommendations: Table VII Ligand AbbreviationsSalih PaşaNo ratings yet
- Technical Data Handbook of Carbon Steel FittingsDocument244 pagesTechnical Data Handbook of Carbon Steel FittingsKrishna KumarNo ratings yet
- Important Questions For Pds-1 Unit Test-Ii Part-ADocument2 pagesImportant Questions For Pds-1 Unit Test-Ii Part-ANithiBoazNo ratings yet
- Design PDFDocument202 pagesDesign PDFLorraine100% (1)
- Stem PDFDocument16 pagesStem PDFPhoemela Joyce Roa LustreNo ratings yet
- Elecrical Lesson 1 - Earthing Systems 2Document7 pagesElecrical Lesson 1 - Earthing Systems 2Noor Zamri SudinNo ratings yet
- Practical Exam IJSO 2012Document8 pagesPractical Exam IJSO 2012mpecthNo ratings yet
- Neet Structural Organisation in Animals Important QuestionsDocument18 pagesNeet Structural Organisation in Animals Important QuestionsARKA NEET BIOLOGYNo ratings yet
- Area and Power Efficient Ecc For Multiple Adjacent Bit Errors in SramsDocument4 pagesArea and Power Efficient Ecc For Multiple Adjacent Bit Errors in Sramssri deviNo ratings yet
- 2014 ForesterDocument7,222 pages2014 ForesterMykhail KubasovNo ratings yet
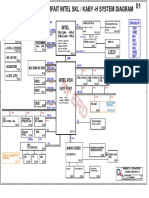
- Power Pavilion Parfait Intel SKL / Kaby - H System DiagramDocument52 pagesPower Pavilion Parfait Intel SKL / Kaby - H System DiagramAbnesis NesisNo ratings yet
- Open-Ocean Barrier Islands: Global in Uence of Climatic, Oceanographic, and Depositional SettingsDocument17 pagesOpen-Ocean Barrier Islands: Global in Uence of Climatic, Oceanographic, and Depositional SettingsMicheleFontanaNo ratings yet
- FOC and DTCDocument69 pagesFOC and DTCRaed MohsenNo ratings yet
- What Is The First Law of Thermodynamics - Laws of Thermodynamics - Thermodynamics - Physics - Khan AcademyDocument9 pagesWhat Is The First Law of Thermodynamics - Laws of Thermodynamics - Thermodynamics - Physics - Khan AcademyAbouFatehNo ratings yet
- 1 MC Culloh Pitts Neuron Model 22 Jul 2019material I 22 Jul 2019 Intro NewDocument58 pages1 MC Culloh Pitts Neuron Model 22 Jul 2019material I 22 Jul 2019 Intro NewBarry AllenNo ratings yet
- Accurex, Model XXEW-10.0 Wall-Mounted Canopy Exhaust Hood Performance ReportDocument23 pagesAccurex, Model XXEW-10.0 Wall-Mounted Canopy Exhaust Hood Performance ReportProingmeca CANo ratings yet
- Gnuradio ProgrammingDocument28 pagesGnuradio ProgrammingJavier MelendrezNo ratings yet