Download as pdf or txt
You might also like
- ME6261-Computer Aided Drafting and Modeling Lab PDFDocument64 pagesME6261-Computer Aided Drafting and Modeling Lab PDFRamesh Jangala100% (1)
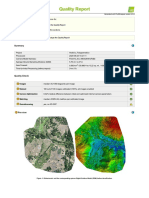
- Quality Report: Generated With Pix4Dmapper Version 4.5.6Document8 pagesQuality Report: Generated With Pix4Dmapper Version 4.5.6Fernanda HerediaNo ratings yet
- Quality Report: Generated With Pix4Denterprise Version 4.4.12Document9 pagesQuality Report: Generated With Pix4Denterprise Version 4.4.12jaretd martinezNo ratings yet
- GAMORURO TUTO ReportDocument6 pagesGAMORURO TUTO ReportSanty NorNo ratings yet
- 02.05. Reporte de CalidadDocument9 pages02.05. Reporte de Calidadjacqueline roxana cadillo giraldoNo ratings yet
- LOS CARASKM16 - ReportDocument8 pagesLOS CARASKM16 - ReportStalin CoralNo ratings yet
- Projekt 2 1 Be DH 9 ReportDocument7 pagesProjekt 2 1 Be DH 9 ReportvbirrNo ratings yet
- Quality Report: Generated With Pix4Dmapper Version 4.5.6Document11 pagesQuality Report: Generated With Pix4Dmapper Version 4.5.6Alex Jaime Chaurra DiazNo ratings yet
- Proyecto Lima Practica - ReportDocument8 pagesProyecto Lima Practica - ReportJJorge Pacheco LauraNo ratings yet
- Kit GD Phantom4 PPK ReportDocument8 pagesKit GD Phantom4 PPK ReportmarksNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration Detailsjaretd martinezNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration DetailseduardoNo ratings yet
- Quality Report: Calibration DetailsDocument10 pagesQuality Report: Calibration DetailsjesNo ratings yet
- Procesamiento Casa - ReportDocument9 pagesProcesamiento Casa - ReportPepe casoNo ratings yet
- Project 2024 02 29T00 - 43 - 38.049Z - ReportDocument10 pagesProject 2024 02 29T00 - 43 - 38.049Z - ReportYordi Baca HerreraNo ratings yet
- Informe de Calidad Lev DronDocument9 pagesInforme de Calidad Lev DronAdrian Vasquez BerrezuetaNo ratings yet
- Serranopolis Do Iguacu ReportDocument8 pagesSerranopolis Do Iguacu ReportDouglas MarquesNo ratings yet
- PARTMEDIA ReportDocument12 pagesPARTMEDIA ReportStalin CoralNo ratings yet
- TANGANA ReportDocument9 pagesTANGANA ReportFrank Morales TomyNo ratings yet
- Cholchol ReportDocument9 pagesCholchol ReportdiazsaezNo ratings yet
- PUENTE IBARRA - ReportDocument9 pagesPUENTE IBARRA - ReportStalin CoralNo ratings yet
- SOLANO ReportDocument7 pagesSOLANO ReportStalin CoralNo ratings yet
- Ilovepdf MergedDocument62 pagesIlovepdf MergedMaria Alejandra VivancoNo ratings yet
- Quiality - Report - Proyecto-01Document10 pagesQuiality - Report - Proyecto-01carlos alradoado calderonNo ratings yet
- Reporte OrtomosaicoDocument8 pagesReporte OrtomosaicoArdila YezidNo ratings yet
- SANJACINTO3D ReportDocument8 pagesSANJACINTO3D ReportStalin CoralNo ratings yet
- Relevamiento Drone - Project-2021-01-18 - ReportDocument9 pagesRelevamiento Drone - Project-2021-01-18 - ReportarieldariomartinNo ratings yet
- Reporte HuanucDocument15 pagesReporte HuanucLalex Torres TorresNo ratings yet
- Quality Report: Calibration DetailsDocument11 pagesQuality Report: Calibration DetailsVinicius PaulinoNo ratings yet
- Quality Report: Calibration DetailsDocument4 pagesQuality Report: Calibration DetailsGeosan LtdaNo ratings yet
- Mappa Demonstrativo Report PDFDocument10 pagesMappa Demonstrativo Report PDFMarcos PerliNo ratings yet
- Informe Pix4D PresaHooverDocument27 pagesInforme Pix4D PresaHooverJERIIKINNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration DetailsfaridNo ratings yet
- RUBAYA ReportDocument5 pagesRUBAYA ReportChristophe MadihanoNo ratings yet
- Quality Report: Calibration DetailsDocument5 pagesQuality Report: Calibration DetailsAlmubaraq Ratomi PrasadNo ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration DetailsIsmael CoulibalyNo ratings yet
- Informe Tarea 3Document10 pagesInforme Tarea 3Miguel angel BarreroNo ratings yet
- Processing Report: ImagesDocument7 pagesProcessing Report: Imagesk0zminNo ratings yet
- Sinohidroo Report 1Document12 pagesSinohidroo Report 1Wilfredo TejerinaNo ratings yet
- Tambo de Mora - ReportDocument12 pagesTambo de Mora - ReportAlberto Chávez AngelesNo ratings yet
- Quality Report: Calibration DetailsDocument4 pagesQuality Report: Calibration Detailskana ngalamNo ratings yet
- Quality Report: Calibration DetailsDocument5 pagesQuality Report: Calibration DetailsGeodrones LimaNo ratings yet
- Coba Report UavDocument8 pagesCoba Report UavSIE LOGAM DAN BATUBARA DESDM SUMBARNo ratings yet
- Drone ReportDocument6 pagesDrone Reporthanif0404No ratings yet
- Quality Report: Calibration DetailsDocument7 pagesQuality Report: Calibration Detailsdanb1No ratings yet
- Quality Report: Calibration DetailsDocument4 pagesQuality Report: Calibration DetailsKélibiano FirasNo ratings yet
- Experimental Study of Measurement Errors in 3D-DIC Due To Out-of-Plane Specimen RotationDocument5 pagesExperimental Study of Measurement Errors in 3D-DIC Due To Out-of-Plane Specimen RotationRafael RodriguezNo ratings yet
- Benq PE7700 20070110 133842 SpecificationsDocument28 pagesBenq PE7700 20070110 133842 SpecificationsconyakNo ratings yet
- (Referensi Bilinear) Image Scaling Comparison Using Universal Image Quality IndexDocument5 pages(Referensi Bilinear) Image Scaling Comparison Using Universal Image Quality IndexMuhamad LuqmanNo ratings yet
- Implementing Security Using Iris Recognition Using MatlabDocument10 pagesImplementing Security Using Iris Recognition Using MatlabDeepak Kumar100% (1)
- Chapter - 3 Image FilteringDocument79 pagesChapter - 3 Image FilteringEthio Coding SchoolNo ratings yet
- ODM Quality Report: Dataset SummaryDocument6 pagesODM Quality Report: Dataset SummaryPAVEL RAMON CASTILLA HUAMANNo ratings yet
- Digital Mammography: Martin J. YaffeDocument9 pagesDigital Mammography: Martin J. YaffeAnas AlyNo ratings yet
- Fingerprint Recognition and Evaluation System 16-17 TermDocument21 pagesFingerprint Recognition and Evaluation System 16-17 Termtiwaririshi681No ratings yet
- Digital Image Definitions&TransformationsDocument18 pagesDigital Image Definitions&TransformationsAnand SithanNo ratings yet
- Design and Implementation of Fingerprint Recognition Process On FpgaDocument9 pagesDesign and Implementation of Fingerprint Recognition Process On FpgalambanaveenNo ratings yet
- Conceptos de VisiónDocument56 pagesConceptos de VisiónKeromy LeeNo ratings yet
- AN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESFrom EverandAN IMPROVED TECHNIQUE FOR MIX NOISE AND BLURRING REMOVAL IN DIGITAL IMAGESNo ratings yet
- Portable Photoshop CS5 ExtendedDocument2 pagesPortable Photoshop CS5 ExtendedNappikNo ratings yet
- Core Abilities Profile PDFDocument85 pagesCore Abilities Profile PDFRosma WatiNo ratings yet
- 02 MM Shader Userguide CatiaDocument4 pages02 MM Shader Userguide CatiaspsharmagnNo ratings yet
- Photo ListDocument1,320 pagesPhoto ListViju RajuNo ratings yet
- Tugas1 - Abyan Jadidan (2106782058) 05.09.2021Document17 pagesTugas1 - Abyan Jadidan (2106782058) 05.09.2021Abyan JadidanNo ratings yet
- Godzilla: Seamless 2D and 3D Sketch Environment For Reflective and Creative Design WorkDocument8 pagesGodzilla: Seamless 2D and 3D Sketch Environment For Reflective and Creative Design Worksinghishpal24374No ratings yet
- 3D Virtual Worlds and The Metaverse: Current Status and Future PossibilitiesDocument37 pages3D Virtual Worlds and The Metaverse: Current Status and Future PossibilitiesWill BurnsNo ratings yet
- Introduction To Colour ConceptsDocument16 pagesIntroduction To Colour ConceptsGuido JonesNo ratings yet
- The Dimensions of ColourDocument13 pagesThe Dimensions of ColourDavid Perez SattdNo ratings yet
- Dialux OpenGL InformationDocument2 pagesDialux OpenGL InformationYuniar Adi WNo ratings yet
- KR Line Standard Ink ColorsDocument1 pageKR Line Standard Ink Colorstimsivy100% (1)
- CV Lecture 4Document52 pagesCV Lecture 4Lovely dollNo ratings yet
- Hybrid Light Field Imaging For Improved Spatial Resolution and Depth RangeDocument11 pagesHybrid Light Field Imaging For Improved Spatial Resolution and Depth RangeWafa BenzaouiNo ratings yet
- FEMAP v8.3 Updates and Corrections: Welcome To FEMAP README For Previous VersionsDocument132 pagesFEMAP v8.3 Updates and Corrections: Welcome To FEMAP README For Previous Versionsantonio carlos peixoto de miranda gomesNo ratings yet
- Lecture 4: Analyzing HashtagsDocument18 pagesLecture 4: Analyzing HashtagsAhmed ElmiNo ratings yet
- Full Ebook of Game Development With Blender and Godot 1St Edition Kumsal Obuz Online PDF All ChapterDocument69 pagesFull Ebook of Game Development With Blender and Godot 1St Edition Kumsal Obuz Online PDF All Chapterjohngross404580100% (7)
- Illustrator 9Document2 pagesIllustrator 9Rajesh MekalthuruNo ratings yet
- Pillow (PIL Fork) DocumentationDocument254 pagesPillow (PIL Fork) DocumentationfellowshopperNo ratings yet
- RGB Color Codes ChartDocument7 pagesRGB Color Codes ChartWilliam Chandra PratamaNo ratings yet
- Edge Detection and Hough TransformDocument5 pagesEdge Detection and Hough TransformAnonymous vjHBiIYNo ratings yet
- Bitsavers Index ManualDocument862 pagesBitsavers Index ManualAditya Veer SinghNo ratings yet
- UE3 Auto Report Ini Dump 0001Document256 pagesUE3 Auto Report Ini Dump 0001Dito ArdantoNo ratings yet
- Opencv Interview QuestionsDocument3 pagesOpencv Interview QuestionsYogesh YadavNo ratings yet
- Two Point PerspectiveDocument5 pagesTwo Point PerspectiveselinadelamotteNo ratings yet
- CS 352: Computer Graphics: Input InteractionDocument52 pagesCS 352: Computer Graphics: Input InteractionNitesh BhuraNo ratings yet
- Assignment-8 Noc18 Ce34 65Document3 pagesAssignment-8 Noc18 Ce34 65Rashmi RaiNo ratings yet
- FurMark 0001Document1 pageFurMark 0001Alexandre Gibert MWNo ratings yet
- Advanced Viewing R2 v0701 FseDocument21 pagesAdvanced Viewing R2 v0701 FseАndreyNo ratings yet
- Introduction To Adobe Illustrator - PowerpointDocument16 pagesIntroduction To Adobe Illustrator - Powerpointapi-2874126830% (1)