Download as pdf or txt
You might also like
- Lord Flies: of TheDocument49 pagesLord Flies: of TheDonald Glover100% (1)
- Mother Earth by Chris ThomasDocument13 pagesMother Earth by Chris ThomasCoincidence Cafe100% (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Review Test 6: READING (10 Marks)Document4 pagesReview Test 6: READING (10 Marks)Sebass PPNo ratings yet
- ASME - PTC4.1 .Boiler Efficiency TestDocument29 pagesASME - PTC4.1 .Boiler Efficiency TestBC Harish92% (13)
- Physica C: Superconductivity and Its Applications: SciencedirectDocument8 pagesPhysica C: Superconductivity and Its Applications: SciencedirectayzaahuhuNo ratings yet
- I Vtec Research PapersDocument7 pagesI Vtec Research Papersfvffv0x7100% (1)
- A High Speed Test Rig Capable of Running at 190,000rpm To Characterize Gas Foil Thrust BearingsDocument7 pagesA High Speed Test Rig Capable of Running at 190,000rpm To Characterize Gas Foil Thrust Bearingshouliukai2024No ratings yet
- Ksam 38 171Document9 pagesKsam 38 171Richard De Medeiros CastroNo ratings yet
- Reducing Fuel Consumption Using Flywheel Battery Technology For Rubber Tyred Gantry Cranes in Container TerminalsDocument20 pagesReducing Fuel Consumption Using Flywheel Battery Technology For Rubber Tyred Gantry Cranes in Container TerminalsZohaib Alam WarraichNo ratings yet
- Design and Analysis of Hydraulic Arm With GripperDocument6 pagesDesign and Analysis of Hydraulic Arm With GripperIJRASETPublicationsNo ratings yet
- Aiaa 1986 1481 691Document31 pagesAiaa 1986 1481 691anhntran4850No ratings yet
- Back To Back Test RigDocument18 pagesBack To Back Test RigAmit Kumar BishwakarmaNo ratings yet
- Design and Analysis of A Scaled Model of A High-Rise, High-Speed ElevatorDocument25 pagesDesign and Analysis of A Scaled Model of A High-Rise, High-Speed ElevatorFedericaNo ratings yet
- Wave LengthhDocument20 pagesWave Lengthhmabm89No ratings yet
- HTSMotorsfor High Speed Ships ASNEDocument15 pagesHTSMotorsfor High Speed Ships ASNERaymond GeorgeNo ratings yet
- Flywheel Energy Storage Systems With Superconducting Bearings For Utility ApplicationsDocument27 pagesFlywheel Energy Storage Systems With Superconducting Bearings For Utility ApplicationsVipin Sekar100% (1)
- A Feedback Linearization Control of Container Cranes: Varying Rope LengthDocument10 pagesA Feedback Linearization Control of Container Cranes: Varying Rope LengthAdarsh shandilyaNo ratings yet
- NUS Centrifuge Manual - Version 2 - June 2011Document98 pagesNUS Centrifuge Manual - Version 2 - June 2011lohitsnNo ratings yet
- Shock Tunnel Studies of The Hypersonic Flowfield Around The Hypervelocity Ballistic Models With AerospikesDocument5 pagesShock Tunnel Studies of The Hypersonic Flowfield Around The Hypervelocity Ballistic Models With AerospikessaiNo ratings yet
- Experimental Investigation On A Two-Part Underwater Towed SystemDocument16 pagesExperimental Investigation On A Two-Part Underwater Towed SysteminaatNo ratings yet
- Advanced Heat Transfer Analysis of Continuously Variable Transmissions (CVT) PDFDocument9 pagesAdvanced Heat Transfer Analysis of Continuously Variable Transmissions (CVT) PDFDaniel Escobar100% (1)
- Automotive Testing in The German-Dutch Wind Tunnels: Eddy Willemsen, Kurt Pengel, Herman Holthusen, Albert Küpper, Et AlDocument17 pagesAutomotive Testing in The German-Dutch Wind Tunnels: Eddy Willemsen, Kurt Pengel, Herman Holthusen, Albert Küpper, Et AlAnonymous 07A7rmhNo ratings yet
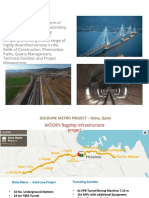
- Brasov - Lot 2 Project - Tunneling Solution - 24.07.21 NDCDocument39 pagesBrasov - Lot 2 Project - Tunneling Solution - 24.07.21 NDCAlinNo ratings yet
- Maglev TrainDocument13 pagesMaglev Trainnasreen_mukti93No ratings yet
- The First Hybrid CRP-POD Driven Fast ROPAX Ferry (Paper)Document5 pagesThe First Hybrid CRP-POD Driven Fast ROPAX Ferry (Paper)pal_malayNo ratings yet
- Design Study of Podded Propulsion System For Naval ShipDocument8 pagesDesign Study of Podded Propulsion System For Naval Shippal_malayNo ratings yet
- Hyperloop: Presented byDocument29 pagesHyperloop: Presented bykumar pranavNo ratings yet
- GrabtongDocument20 pagesGrabtongAravind J100% (1)
- Op Tim Ization of TruckDocument13 pagesOp Tim Ization of Truckshinoj psNo ratings yet
- Study of The Turbojet Engines As Propulsion SystemDocument13 pagesStudy of The Turbojet Engines As Propulsion SystemRajath ShettyNo ratings yet
- Telemicroscopy Erosion Measurements of 5Document7 pagesTelemicroscopy Erosion Measurements of 5Sanico PrulliNo ratings yet
- Automated Drilling Algorithms ImplementationDocument11 pagesAutomated Drilling Algorithms ImplementationnanlingjigongNo ratings yet
- Ashish Project ReportDocument57 pagesAshish Project ReportAshish SinghNo ratings yet
- Hyperloop: Presented By: Meshel AlkorbiDocument16 pagesHyperloop: Presented By: Meshel AlkorbiMeshel AlkorbiNo ratings yet
- Modular Heavy Duty Truck TransmissionDocument6 pagesModular Heavy Duty Truck Transmissionphucdc095041No ratings yet
- The 4 - 95 Stirling Engine For Underwater ApplicationDocument4 pagesThe 4 - 95 Stirling Engine For Underwater ApplicationVladimirDvortsovNo ratings yet
- Helicopter Drive TrainDocument25 pagesHelicopter Drive Traincosta59dac9242No ratings yet
- Cheng Et Al 2019 Rotor Dynamic Experimental Investigation of An Ultra High Speed Permanent Magnet Synchronous MotorDocument11 pagesCheng Et Al 2019 Rotor Dynamic Experimental Investigation of An Ultra High Speed Permanent Magnet Synchronous MotorSRUSTI PRIYADARSHININo ratings yet
- Technology and Development of High Temperature Superconducting Linear MotorsDocument6 pagesTechnology and Development of High Temperature Superconducting Linear Motorsg.jayakrishnaNo ratings yet
- A New Approach To Linear Motion Technology: The Wall Is The LimitDocument6 pagesA New Approach To Linear Motion Technology: The Wall Is The LimitYok Böle BişiNo ratings yet
- Faxe2 PDFDocument43 pagesFaxe2 PDFleo100% (1)
- Hyperloop 170201003657Document29 pagesHyperloop 170201003657RafaelLazoPomaNo ratings yet
- Stress Analysis Tractor TrailerDocument8 pagesStress Analysis Tractor TrailerBONARCOSNo ratings yet
- SPE 141234 Coiled Tubing Operations From A Work BoatDocument9 pagesSPE 141234 Coiled Tubing Operations From A Work BoatAli mohammadNo ratings yet
- TP23 Rabot PDFDocument16 pagesTP23 Rabot PDFJefreyMatuanMondranoNo ratings yet
- WAG-12 - 12,000 HP Locomotive, SpecificationsDocument4 pagesWAG-12 - 12,000 HP Locomotive, SpecificationsAmiya Roy100% (2)
- Revue Tananariviene Global StreetDocument10 pagesRevue Tananariviene Global StreetermanjatoNo ratings yet
- Design and Control of Hybrid Underwater GliderDocument9 pagesDesign and Control of Hybrid Underwater GliderAnh NgoNo ratings yet
- Maglev Levitation Trains Research PapersDocument4 pagesMaglev Levitation Trains Research Papersafeawqynw100% (1)
- Research On A Transverse-Flux Brushless Double-Rotor Machine For Hybrid Electric VehiclesDocument12 pagesResearch On A Transverse-Flux Brushless Double-Rotor Machine For Hybrid Electric VehiclesedumacerenNo ratings yet
- Loader Power-Split Transmission System Based On A Planetary Gear SetDocument8 pagesLoader Power-Split Transmission System Based On A Planetary Gear SetsughieantoNo ratings yet
- Semi-Active Control of A Nonlinear Quarter-Car Model of Hyperloop Capsule Vehicle With Skyhook and Mixed Skyhook-Acceleration Driven Damper ControllerDocument14 pagesSemi-Active Control of A Nonlinear Quarter-Car Model of Hyperloop Capsule Vehicle With Skyhook and Mixed Skyhook-Acceleration Driven Damper ControllerBirhan AbebawNo ratings yet
- Backpressure Characteristics of Modern Three-Way Catalysts, Benefit On Engine PerformanceDocument9 pagesBackpressure Characteristics of Modern Three-Way Catalysts, Benefit On Engine Performancearash501No ratings yet
- Proc PodPropulsion SternDriveDocument41 pagesProc PodPropulsion SternDriveNaimishNo ratings yet
- Project Report-Dlw PrashantDocument15 pagesProject Report-Dlw PrashantPrashant Singh75% (4)
- A Design of High Efficient Gantry Crane For UltraDocument7 pagesA Design of High Efficient Gantry Crane For UltraFEDERICO ESTEBAN BABICHNo ratings yet
- Comparison of Methods ForDocument13 pagesComparison of Methods ForClaudio NovaesNo ratings yet
- 856 863 PDFDocument8 pages856 863 PDFAbhishekNo ratings yet
- Drdo - TF December 2013 WebDocument12 pagesDrdo - TF December 2013 WebcheenuNo ratings yet
- Stability of An Underwater Work Platform Suspended From An Unstable ReferenceDocument6 pagesStability of An Underwater Work Platform Suspended From An Unstable ReferenceMohan BabuNo ratings yet
- 1 s2.0 S1474667017303464 Main PDFDocument6 pages1 s2.0 S1474667017303464 Main PDFBagas Eko LaksonoNo ratings yet
- Design and Simulation of A Model Maglev Vehicle: October 2018Document9 pagesDesign and Simulation of A Model Maglev Vehicle: October 2018rtx FaristfNo ratings yet
- Highly Integrated Gate Drivers for Si and GaN Power TransistorsFrom EverandHighly Integrated Gate Drivers for Si and GaN Power TransistorsNo ratings yet
- PrimeProbe3+ PPS-PP3-044-2.0Document18 pagesPrimeProbe3+ PPS-PP3-044-2.0Kishan ChandrasekaraNo ratings yet
- Güntürkün, Bugnyar (2016) Cognition Without CortexDocument13 pagesGüntürkün, Bugnyar (2016) Cognition Without CortexMak PavičevićNo ratings yet
- API 570-Final Model Exam-Open Book Without AnswersDocument6 pagesAPI 570-Final Model Exam-Open Book Without Answersbanana100% (1)
- Convocation FormDocument5 pagesConvocation Formsrahul_160% (1)
- Report Format H&TDocument28 pagesReport Format H&TNila VeerapathiranNo ratings yet
- Chapter 7 Multiple ChoiceDocument6 pagesChapter 7 Multiple ChoiceAitan AzizovaNo ratings yet
- Forensic Medicine in PortugalDocument10 pagesForensic Medicine in PortugalAlexandra Ançã PiresNo ratings yet
- Signet 515 Rotor-X Paddlewheel Flow Sensors: FeaturesDocument6 pagesSignet 515 Rotor-X Paddlewheel Flow Sensors: FeaturesJonhatan SilvaNo ratings yet
- SP Sampling Lect 34Document20 pagesSP Sampling Lect 34Jaya PrakashNo ratings yet
- For Us To Be Able To Be Able To ConstructDocument16 pagesFor Us To Be Able To Be Able To ConstructAnfrett E. BanggollayNo ratings yet
- SK (1) - 1Document20 pagesSK (1) - 1Aaditya DixitNo ratings yet
- Faculty of Engineering & Technology: M.Tech. Admission Handbook 2022-23Document13 pagesFaculty of Engineering & Technology: M.Tech. Admission Handbook 2022-23dirghayu jogeNo ratings yet
- 20-21 AS Prelim MsDocument27 pages20-21 AS Prelim Mskathleen hoNo ratings yet
- Simulation of Charged Particles in Earths MagnetoDocument7 pagesSimulation of Charged Particles in Earths Magnetoeze_firmatenseNo ratings yet
- Astm E855Document8 pagesAstm E855Hulisses MarconNo ratings yet
- Chapter 1 Shaft (Cont'd)Document47 pagesChapter 1 Shaft (Cont'd)Rayuth KEATNo ratings yet
- Workshop Nestle The Art of Communication PDFDocument99 pagesWorkshop Nestle The Art of Communication PDFDaru KurowskyNo ratings yet
- Lista de Exercícios 0 - Conceitos BásicosDocument24 pagesLista de Exercícios 0 - Conceitos BásicosJoýce SilveiraNo ratings yet
- Thesis Vs Position StatementDocument6 pagesThesis Vs Position Statementgtkyxjiig100% (2)
- Chapter 1 The Nature of The Economic ProblemDocument6 pagesChapter 1 The Nature of The Economic ProblemWeirdoNo ratings yet
- Alfa 1 AntitripsinDocument4 pagesAlfa 1 AntitripsinDwitaRiadiniNo ratings yet
- Syntax: The Sentence Patterns of LanguageDocument46 pagesSyntax: The Sentence Patterns of LanguageGhosNo ratings yet
- BAO BOA Users GuideDocument3 pagesBAO BOA Users GuideleisztomNo ratings yet
- Environment MonitoringDocument18 pagesEnvironment MonitoringLakshana Bundhoo100% (1)
- Design Inset-Fed Microstrip Patch Antennas PDFDocument8 pagesDesign Inset-Fed Microstrip Patch Antennas PDFsorinproiecteNo ratings yet
- Job Safety Analysis (JSA) - CONCRETE WORKS - DateDocument2 pagesJob Safety Analysis (JSA) - CONCRETE WORKS - Datenabeel100% (1)