Download as pdf or txt
You might also like
- Assignment 1Document8 pagesAssignment 1William ChinNo ratings yet
- Geografia 12 Classe (Longman Moç.)Document195 pagesGeografia 12 Classe (Longman Moç.)Orlando Cuna86% (7)
- Corps - DIV Staff GuideDocument457 pagesCorps - DIV Staff GuideChris WhiteheadNo ratings yet
- A Study On Remote Code Execution Vulnerability in Web ApplicationsDocument9 pagesA Study On Remote Code Execution Vulnerability in Web ApplicationshiepleeNo ratings yet
- 2D & 3D Crosshole Sonic Logging Tomography (CSLT) Versus Crosshole Sonic Logging (CSL) For Drilled ShaftsDocument14 pages2D & 3D Crosshole Sonic Logging Tomography (CSLT) Versus Crosshole Sonic Logging (CSL) For Drilled ShaftsOscar AdamsNo ratings yet
- Diaphragm WallDocument14 pagesDiaphragm WallDwight AndersonNo ratings yet
- Likins2006 - Defect Analysis For CSLDocument10 pagesLikins2006 - Defect Analysis For CSLJuJUsNo ratings yet
- CSL Method Brief DIGITALDocument4 pagesCSL Method Brief DIGITALlimaNo ratings yet
- Defect Analysis For CSL TestingDocument8 pagesDefect Analysis For CSL TestingJames RoddNo ratings yet
- Techbrief CT WebDocument5 pagesTechbrief CT WebParaskevi KallouNo ratings yet
- Cross Hole Sonic Logging APPLICATION WORD FORMATDocument3 pagesCross Hole Sonic Logging APPLICATION WORD FORMATQc C7No ratings yet
- As NT Tomography 2002Document8 pagesAs NT Tomography 2002Dunca DanielNo ratings yet
- Pile and Shaft Integrity Test Results, Classification, Acceptance And/or RejectionDocument11 pagesPile and Shaft Integrity Test Results, Classification, Acceptance And/or RejectionJoe ArmandaNo ratings yet
- A Review of Cross-Hole Ultrasonic Logging For Foundation Integrity Testing and Its Evaluation CriteriaDocument6 pagesA Review of Cross-Hole Ultrasonic Logging For Foundation Integrity Testing and Its Evaluation CriterialimaNo ratings yet
- Embeded Length Anchor BoltDocument19 pagesEmbeded Length Anchor BoltWai CYNo ratings yet
- Tohama: FOR Engineering Inspection CO. L.L.CDocument36 pagesTohama: FOR Engineering Inspection CO. L.L.CNoob DominoeNo ratings yet
- Cross Hole Sonic Test Results For Analysis of Pile Load Test - Advances in Bridge Engineering - Full TextDocument33 pagesCross Hole Sonic Test Results For Analysis of Pile Load Test - Advances in Bridge Engineering - Full Textsantanu mukherjeeNo ratings yet
- Infrastructures 03 00029Document19 pagesInfrastructures 03 00029d3dxbrasilNo ratings yet
- Crosshole Sonic LoggingDocument2 pagesCrosshole Sonic LoggingganmosesNo ratings yet
- Insi 48 6 360Document8 pagesInsi 48 6 360PiseyNo ratings yet
- Pplication: Rosshole Onic OggingDocument5 pagesPplication: Rosshole Onic Oggingshady masoodNo ratings yet
- Bored Pile - Integrity TestDocument2 pagesBored Pile - Integrity TestvisvisvisvisNo ratings yet
- Nveo 8 (6) - 442Document20 pagesNveo 8 (6) - 442Amar HassanNo ratings yet
- Examination of A New Cross-Hole Sonic Logging System For Integrity Testing of Drilled ShaftsDocument8 pagesExamination of A New Cross-Hole Sonic Logging System For Integrity Testing of Drilled ShaftsVetriselvan ArumugamNo ratings yet
- Characterization of Behind-Armor Debris Particles From Tungsten Penetrators B. Pedersen, S. BlessDocument8 pagesCharacterization of Behind-Armor Debris Particles From Tungsten Penetrators B. Pedersen, S. Blesshay11133No ratings yet
- LRUT - Guided Wave Inspection TechniqueDocument40 pagesLRUT - Guided Wave Inspection TechniqueVijay Max100% (1)
- Defect Types and Non-Destructive Testing Techniques For Composites and Bonded JointsDocument19 pagesDefect Types and Non-Destructive Testing Techniques For Composites and Bonded JointsShanker PandeyNo ratings yet
- NDE Innovations by Larry OlsonDocument21 pagesNDE Innovations by Larry OlsonSanjeew K. SinghNo ratings yet
- Corrosion of Steel in Concrete Understanding Investigation and Repair-51-100Document50 pagesCorrosion of Steel in Concrete Understanding Investigation and Repair-51-100Sumit Singh ThakurNo ratings yet
- Evaluation of Pile Intergrity Using Cross Hole Sonic Logging TestDocument5 pagesEvaluation of Pile Intergrity Using Cross Hole Sonic Logging TestDayah Mahadi100% (1)
- Barrier Verification: January 2020Document26 pagesBarrier Verification: January 2020edison nadeakNo ratings yet
- Review of Deep Foundations Integrity Testing Methods and Case HistoriesDocument30 pagesReview of Deep Foundations Integrity Testing Methods and Case HistoriesSANDEEP DANGDANo ratings yet
- BSCE 2003-11 - Paikowsky & Chernauskas - tcm18-106947Document30 pagesBSCE 2003-11 - Paikowsky & Chernauskas - tcm18-106947BaraNo ratings yet
- Cross HoleDocument6 pagesCross HoleSheane GutomanNo ratings yet
- Non-Destructive Testing Methods To Identify Voids in External Post Tensioned TendonsDocument10 pagesNon-Destructive Testing Methods To Identify Voids in External Post Tensioned TendonsgullipalliNo ratings yet
- Sizing Stress Corrosion Cracks Using Laser Ultrasonics: AbstractDocument9 pagesSizing Stress Corrosion Cracks Using Laser Ultrasonics: AbstractHyujeii MceNo ratings yet
- 4.4 Tomar PDFDocument9 pages4.4 Tomar PDFHyujeii MceNo ratings yet
- Comparison of TDR and Inclinometers For Slope MonitoringDocument16 pagesComparison of TDR and Inclinometers For Slope MonitoringLego4kNo ratings yet
- Sonic Logging Test PresentationDocument21 pagesSonic Logging Test PresentationYip Ying MunNo ratings yet
- SW2008.Critical Comparison of Ultrasonic Pile Testing StandardsDocument5 pagesSW2008.Critical Comparison of Ultrasonic Pile Testing StandardsMansourLassouedNo ratings yet
- Casting Defect TestingDocument7 pagesCasting Defect TestingMukesh GuptaNo ratings yet
- Spatial Time-Dependent Reliability Analysis of Corroding Pretensioned Prestressed Concrete Bridge Girders PDFDocument16 pagesSpatial Time-Dependent Reliability Analysis of Corroding Pretensioned Prestressed Concrete Bridge Girders PDFEasonNo ratings yet
- Development of Assessment Technique For Tunnel Concrete Lining Using Wavelet TransformDocument5 pagesDevelopment of Assessment Technique For Tunnel Concrete Lining Using Wavelet TransformHarold TaylorNo ratings yet
- Dot 34512 DS1 PDFDocument37 pagesDot 34512 DS1 PDFHyujeii MceNo ratings yet
- In-Process Detection of Weld Defects Using Laser-Based UltrasoundDocument12 pagesIn-Process Detection of Weld Defects Using Laser-Based UltrasoundvarshithaNo ratings yet
- Low Strain Pile Integrity TestingDocument6 pagesLow Strain Pile Integrity TestingWaqas SadiqNo ratings yet
- Handheld Sizing StressDocument18 pagesHandheld Sizing StressAntonio PerezNo ratings yet
- Dariusz BARTOCHA, Jacek SUCHOŃ, Czesław BARON, Jan SZAJNARDocument7 pagesDariusz BARTOCHA, Jacek SUCHOŃ, Czesław BARON, Jan SZAJNARskNo ratings yet
- Method Statement For Pile Integrity Test ProcedureDocument3 pagesMethod Statement For Pile Integrity Test ProcedureDharma Pratap Lamgade100% (1)
- Transaksi HKIE Institusi Insinyur Hong KongDocument10 pagesTransaksi HKIE Institusi Insinyur Hong KongKarya tulisNo ratings yet
- In-Process Detection of Weld Defects Using Laser-Based UltrasoundDocument12 pagesIn-Process Detection of Weld Defects Using Laser-Based UltrasoundYasar Arshad ShNo ratings yet
- 2016 Ge 27 PDFDocument6 pages2016 Ge 27 PDFRMRE UETNo ratings yet
- Application of Ultrasonic Guided Wave To Heat Exchanger Tubes InspectionDocument6 pagesApplication of Ultrasonic Guided Wave To Heat Exchanger Tubes InspectionAqib AliNo ratings yet
- NDT of Composite Materials Bond of Wind Turbine Blade Using UT - NDT JournalDocument6 pagesNDT of Composite Materials Bond of Wind Turbine Blade Using UT - NDT Journalpokeboy19No ratings yet
- Idges PDFDocument15 pagesIdges PDFBarış ÖzcanNo ratings yet
- PIT Report Soft Copy - Naodoba BridgeDocument55 pagesPIT Report Soft Copy - Naodoba BridgedolonbgdNo ratings yet
- ToFD PDFDocument7 pagesToFD PDFParanthaman Jayaraman100% (1)
- Nondestructive Testing of Concrete With Ultrasonic Pulse-EchoDocument4 pagesNondestructive Testing of Concrete With Ultrasonic Pulse-EchoNabin PaudelNo ratings yet
- Ultrasonic Pile Integrity TestDocument15 pagesUltrasonic Pile Integrity TestPipim PogiNo ratings yet
- Testing of Buried Pipelines Using Guided Waves: A. Demma, D. Alleyne, B. PavlakovicDocument7 pagesTesting of Buried Pipelines Using Guided Waves: A. Demma, D. Alleyne, B. PavlakovicNordin SuhadatNo ratings yet
- Instruments, Measurement Principles and Communication Technologies for Downhole Drilling EnvironmentsFrom EverandInstruments, Measurement Principles and Communication Technologies for Downhole Drilling EnvironmentsNo ratings yet
- Non-Destructive Evaluation of Corrosion and Corrosion-assisted CrackingFrom EverandNon-Destructive Evaluation of Corrosion and Corrosion-assisted CrackingRaman SinghNo ratings yet
- Inspection at LC Gate: S.No Items Checked Observations/Irregularities Action To Be Taken byDocument3 pagesInspection at LC Gate: S.No Items Checked Observations/Irregularities Action To Be Taken byMadhav PrasadNo ratings yet
- Ict Exam Questions For Primary Schools 1 6 1Document5 pagesIct Exam Questions For Primary Schools 1 6 1Calvin and entertainmentNo ratings yet
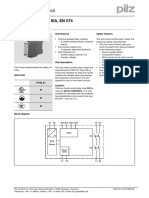
- P1HZ X1 enDocument6 pagesP1HZ X1 enDiiani AmayaNo ratings yet
- User Manual AC 22kw Double PlugsDocument21 pagesUser Manual AC 22kw Double PlugsParvizNo ratings yet
- Difference Between Adaptive and NonDocument4 pagesDifference Between Adaptive and NonTalha Mahmood ChowdhuryNo ratings yet
- 13.3 Reading A System Status List or Partial List With SFC 51 "Rdsysst"Document6 pages13.3 Reading A System Status List or Partial List With SFC 51 "Rdsysst"Daniel RGNo ratings yet
- Design and Fabrication of Robotic Gripper Using 4-Bar LinkageDocument53 pagesDesign and Fabrication of Robotic Gripper Using 4-Bar Linkagevinoth guruNo ratings yet
- Progressive Cavity Pump TroubleshootingDocument8 pagesProgressive Cavity Pump Troubleshootingboy tryadiNo ratings yet
- Monitoring &reporing of Resettlement ImplementationDocument32 pagesMonitoring &reporing of Resettlement ImplementationAmin FentawNo ratings yet
- Pre-Employment Consent Form: Leah Nikka Telesforo SalvadorDocument3 pagesPre-Employment Consent Form: Leah Nikka Telesforo SalvadorNikka SalvadorNo ratings yet
- Setup: This Notebook Contains All The Sample Code and Solutions To The Exercises in Chapter 8Document31 pagesSetup: This Notebook Contains All The Sample Code and Solutions To The Exercises in Chapter 8AmitNo ratings yet
- Dbms Assignment 2 Subhamoy Ghosh 6035Document16 pagesDbms Assignment 2 Subhamoy Ghosh 6035Subhamoy GhoshNo ratings yet
- AS 1012.12.1 (1998) Methods of Testing Concrete Method 12.1 MassDocument5 pagesAS 1012.12.1 (1998) Methods of Testing Concrete Method 12.1 MassMahadi Pm CapahNo ratings yet
- KM 4HK1 e 02Document548 pagesKM 4HK1 e 02Mert Kaygusuz100% (3)
- CV Harshad OnlineDocument4 pagesCV Harshad OnlineDharaniNo ratings yet
- SID-2015-Tutorial 3-Ruaumoko and Dynaplot in Batch ModeDocument26 pagesSID-2015-Tutorial 3-Ruaumoko and Dynaplot in Batch ModeDiego RojasNo ratings yet
- 2h General Step by Step AmazonDocument28 pages2h General Step by Step AmazonbasseyNo ratings yet
- Arts 10 Quarter 3 Week 7 Las # 1Document2 pagesArts 10 Quarter 3 Week 7 Las # 1ariel velaNo ratings yet
- Huawei ETP4830Document68 pagesHuawei ETP4830x00No ratings yet
- Image Captionbot For Assistive TechnologyDocument3 pagesImage Captionbot For Assistive TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Belden MIPPDocument12 pagesBelden MIPPFrancois St-JacquesNo ratings yet
- SEP LEM012SD User ManualDocument11 pagesSEP LEM012SD User ManualkillimandjarogeeettNo ratings yet
- Halmore - PL 25769 - Misc BOP 16-21 of 21Document7 pagesHalmore - PL 25769 - Misc BOP 16-21 of 21Humayun NawazNo ratings yet
- Catalogo Unidad Mark II 2007Document6 pagesCatalogo Unidad Mark II 2007JigsawdgNo ratings yet
- Krystaline 2 (English)Document4 pagesKrystaline 2 (English)José Luis CampelloNo ratings yet
- Syllabus ENTREPRENEURSpring 2013Document8 pagesSyllabus ENTREPRENEURSpring 2013seneca85No ratings yet