Download as pdf or txt
You might also like
- The Effect of Employer Branding On Contractual Employees - EngagemDocument14 pagesThe Effect of Employer Branding On Contractual Employees - EngagemZakiah MustikaNo ratings yet
- Linear Regression and Correlation - A Beginner's GuideDocument220 pagesLinear Regression and Correlation - A Beginner's Guidekhundalini100% (3)
- KEC151P - Lab - Experiments - UPDATED ONEDocument34 pagesKEC151P - Lab - Experiments - UPDATED ONEAkshat GuptaNo ratings yet
- Power Electronics Simulation Lab S-1 Simulation - 2 Analysis of Single Phase Half Wave Thyristor Rectifier Using Different LoadsDocument33 pagesPower Electronics Simulation Lab S-1 Simulation - 2 Analysis of Single Phase Half Wave Thyristor Rectifier Using Different LoadsSaikumar BathulaNo ratings yet
- T60diffsimulatorDocument8 pagesT60diffsimulatorAns MehmoodNo ratings yet
- Three Phase Semi Controlled Rectifier: Rachna College of Engineering & Technology, GujranwalaDocument5 pagesThree Phase Semi Controlled Rectifier: Rachna College of Engineering & Technology, GujranwalaDilatoryNo ratings yet
- Synchronous Buck Converter LAB-2: Power Electronics (ECEN405)Document5 pagesSynchronous Buck Converter LAB-2: Power Electronics (ECEN405)Jafar SadiqNo ratings yet
- EMF Lab ReportDocument11 pagesEMF Lab Reportarslan shahidNo ratings yet
- Power Electronics 2Document9 pagesPower Electronics 2Jontelli SimonNo ratings yet
- EC2700 LAB: Experiments Iii-VDocument12 pagesEC2700 LAB: Experiments Iii-VS GNo ratings yet
- Experiment 1: Aim of The ExperimentDocument58 pagesExperiment 1: Aim of The ExperimentAryan KumarNo ratings yet
- Industrial Electronics Lab 4Document4 pagesIndustrial Electronics Lab 4Prio DurjoyNo ratings yet
- Lab 10Document9 pagesLab 10amngreenNo ratings yet
- I-V Characteristics of SCR, DIAC, TRIACDocument14 pagesI-V Characteristics of SCR, DIAC, TRIACShouvik MitraNo ratings yet
- EL - 124 Electronic Devices & Circuits: Experiment # 06Document10 pagesEL - 124 Electronic Devices & Circuits: Experiment # 06Jawwad IqbalNo ratings yet
- S5 ManualDocument39 pagesS5 ManualAleena ShajuNo ratings yet
- Experiment 9 (Transducers)Document9 pagesExperiment 9 (Transducers)Bet3aNo ratings yet
- Transformer DDocument7 pagesTransformer DQusai AbujwaidNo ratings yet
- Assignment 1 of RTDS 2020Document13 pagesAssignment 1 of RTDS 2020kalinath41No ratings yet
- IA Expt5 and 6Document8 pagesIA Expt5 and 6Shravan MotteNo ratings yet
- Experiment-04: ObjectiveDocument7 pagesExperiment-04: ObjectiveaashishNo ratings yet
- T.E Mphusu Power Trans Lab 2Document12 pagesT.E Mphusu Power Trans Lab 2Young Muller MotlhobogwaNo ratings yet
- S7L1D-G4 Wdg.312 - Technical Data SheetDocument9 pagesS7L1D-G4 Wdg.312 - Technical Data Sheet3efoo100% (1)
- Electronics Laboratory Manual - PHYS 3217 - 1444 PDFDocument61 pagesElectronics Laboratory Manual - PHYS 3217 - 1444 PDFTaukeer KhanNo ratings yet
- Ee215 Lab ReportDocument14 pagesEe215 Lab ReportNguyễn Hữu BáchNo ratings yet
- Silicon-Controlled Rectifier Phase Control: ObjectivesDocument4 pagesSilicon-Controlled Rectifier Phase Control: ObjectivesSTO. TOMAS SHAIRA FRESCONo ratings yet
- AIM: To Evaluate The Performance and Plot Torque-Slip Characteristic of Three-Phase Induction Motor Using Circle DiagramDocument8 pagesAIM: To Evaluate The Performance and Plot Torque-Slip Characteristic of Three-Phase Induction Motor Using Circle Diagramsiddhansh jainNo ratings yet
- S7L1D-F4 Wdg.312 - Technical Data SheetDocument9 pagesS7L1D-F4 Wdg.312 - Technical Data Sheet3efooNo ratings yet
- EM-1 LabDocument49 pagesEM-1 LabApoorvNo ratings yet
- Half Wave Rectiffication Using CRODocument6 pagesHalf Wave Rectiffication Using CROMuhammad Abdullah Zafar GhauriNo ratings yet
- S7L1D-C4 Wdg.312 - Technical Data SheetDocument9 pagesS7L1D-C4 Wdg.312 - Technical Data Sheet3efoo0% (1)
- Lab 5 AnalogDocument13 pagesLab 5 Analogabangcik0099No ratings yet
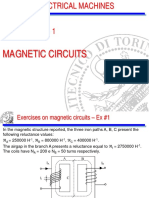
- Exercises On ELECTRICAL MACHINESDocument29 pagesExercises On ELECTRICAL MACHINESDavide100% (1)
- DC and AC CircuitsDocument18 pagesDC and AC Circuitswei.cheng.auNo ratings yet
- Osmania University BE 2/4 Electronic Devices Lab ManualDocument88 pagesOsmania University BE 2/4 Electronic Devices Lab ManualAbdulShehzadNo ratings yet
- S5LD E4Document10 pagesS5LD E4Ardhendu Sekhar BhanjaNo ratings yet
- Ece-213 Lab5 OwenblairDocument7 pagesEce-213 Lab5 Owenblairapi-548288377No ratings yet
- Laboratory 2 ReportDocument40 pagesLaboratory 2 ReportRn NatNo ratings yet
- BMMM 3513 - LAB 1 (DC Motor Series) OtwDocument8 pagesBMMM 3513 - LAB 1 (DC Motor Series) Otwa syukzNo ratings yet
- 2022.05.15 Đáp Án Final Exam Machine Elements PDFDocument7 pages2022.05.15 Đáp Án Final Exam Machine Elements PDFHoàng QuânNo ratings yet
- Experiment 7Document9 pagesExperiment 7MahmoudSehweilNo ratings yet
- S7L1D-D4 Wdg.312 - Technical Data SheetDocument9 pagesS7L1D-D4 Wdg.312 - Technical Data Sheet3efooNo ratings yet
- Exercise Number: 7: Characteristics of SynchrosDocument7 pagesExercise Number: 7: Characteristics of SynchrosRohan MohataNo ratings yet
- Exp 04Document7 pagesExp 04yt7407286No ratings yet
- Beee Ela Project - 2Document8 pagesBeee Ela Project - 2Aditya GorrepatiNo ratings yet
- S7L1D-H4 Wdg.312 - Technical Data SheetDocument9 pagesS7L1D-H4 Wdg.312 - Technical Data Sheet3efooNo ratings yet
- Coverter Resonant LLC ConceptoDocument52 pagesCoverter Resonant LLC ConceptoAntonio DalioNo ratings yet
- Lab 1 InstrumentationDocument15 pagesLab 1 InstrumentationjacksonNo ratings yet
- S4L1D G4Document10 pagesS4L1D G4mohsen_cumminsNo ratings yet
- Experiment 1: Transducer Trainer KitDocument22 pagesExperiment 1: Transducer Trainer KitSamarthNo ratings yet
- Universidad Nacional Pedro Ruiz Gallo Facultad de Ingenieria Emcanica ElectricaDocument9 pagesUniversidad Nacional Pedro Ruiz Gallo Facultad de Ingenieria Emcanica ElectricaJose SaavedraNo ratings yet
- Mini Project - 325 FinalDocument15 pagesMini Project - 325 Finalapi-727620791No ratings yet
- Pratica 3Document10 pagesPratica 3Eberton SantosNo ratings yet
- Objective: To Study and Understand The Working Principle ofDocument10 pagesObjective: To Study and Understand The Working Principle ofmomo momosNo ratings yet
- Appendix B 1 Spread Footing Verification: Pad Footing: Axis A To C (Except Axis 5/C and 8/C) (Section 1.1)Document7 pagesAppendix B 1 Spread Footing Verification: Pad Footing: Axis A To C (Except Axis 5/C and 8/C) (Section 1.1)Civil Mex100% (1)
- S6L1D-C4 Wdg.311 - 312 - Technical Data SheetDocument8 pagesS6L1D-C4 Wdg.311 - 312 - Technical Data Sheetsarahalawa222No ratings yet
- V.Purna Sai Sandeep Reddy U17EC140: Esd Lab-1 (Linear Voltage Regulator)Document27 pagesV.Purna Sai Sandeep Reddy U17EC140: Esd Lab-1 (Linear Voltage Regulator)sandeep reddyNo ratings yet
- Lab Torsion: Prepared For: DR - Chew Bee Tang Department of Mechanical Engineering University of Malaya, MalaysiaDocument7 pagesLab Torsion: Prepared For: DR - Chew Bee Tang Department of Mechanical Engineering University of Malaya, MalaysiaAbood Al-atiyatNo ratings yet
- E 5: W C A: XP Ater Hannel PplicationsDocument9 pagesE 5: W C A: XP Ater Hannel PplicationsMahmoudSehweilNo ratings yet
- EEE332 - Spring - 2023 - Project 2Document21 pagesEEE332 - Spring - 2023 - Project 2Alif KhanNo ratings yet
- The Design of Modern Microwave Oscillators for Wireless Applications: Theory and OptimizationFrom EverandThe Design of Modern Microwave Oscillators for Wireless Applications: Theory and OptimizationNo ratings yet
- Name: . ID No: .. BITS-Pilani Dubai Campus Econ F241 Econometric Methods Semester I, 2018test-1 (Closed Book)Document6 pagesName: . ID No: .. BITS-Pilani Dubai Campus Econ F241 Econometric Methods Semester I, 2018test-1 (Closed Book)Giri PrasadNo ratings yet
- Admin, Hantono Dan Luther Girsang (UNPRI MEDAN)Document12 pagesAdmin, Hantono Dan Luther Girsang (UNPRI MEDAN)arjuna pangalengan2No ratings yet
- Chapter 2 Describe Fundamental Principles of Machine Learning On Azure - Exam Ref AI-900 Microsoft Azure AI FundamentalsDocument61 pagesChapter 2 Describe Fundamental Principles of Machine Learning On Azure - Exam Ref AI-900 Microsoft Azure AI FundamentalsRishita Reddy100% (1)
- Tugas Statel IndividuDocument17 pagesTugas Statel IndividuNur HafizahNo ratings yet
- Regression Performnace MetricsDocument21 pagesRegression Performnace Metricskobaya7455No ratings yet
- Data Analysis and Modeling Bcis New CourseDocument2 pagesData Analysis and Modeling Bcis New CourseSpandan KcNo ratings yet
- Bulletin of The Geological Society of Greece: Vagenas, I. Vlachopoulos, N. Sabatakakis, G. KoukisDocument6 pagesBulletin of The Geological Society of Greece: Vagenas, I. Vlachopoulos, N. Sabatakakis, G. Koukisaprillia frinandaNo ratings yet
- Multiple Choice Questions (With Answers)Document19 pagesMultiple Choice Questions (With Answers)SiddharthaChowdary0% (1)
- Statistical Data Analysis Full ProjectDocument22 pagesStatistical Data Analysis Full ProjectashNo ratings yet
- Relative Importance Index Using SoftwareDocument27 pagesRelative Importance Index Using SoftwareChan Siew ChongNo ratings yet
- Effect of Profitability, Leverage, and Liquidity To The Firm ValueDocument12 pagesEffect of Profitability, Leverage, and Liquidity To The Firm Valueteuku masnur ramadhanNo ratings yet
- The Relationship Between Culture and Tax Evasion Across CountriesDocument12 pagesThe Relationship Between Culture and Tax Evasion Across CountriesÉrika SordiNo ratings yet
- The Influence of Competence On Employee Performance: Investigation of Automotive CompaniesDocument8 pagesThe Influence of Competence On Employee Performance: Investigation of Automotive CompaniessuryadiNo ratings yet
- Linear Regression - Jupyter NotebookDocument56 pagesLinear Regression - Jupyter NotebookUjwal Vajranabhaiah100% (3)
- KeywordsDocument9 pagesKeywordsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Mobile Banking and Financial Performance of Commercial Banks A Case Study of Selected Commercial Banks in UgandaDocument8 pagesMobile Banking and Financial Performance of Commercial Banks A Case Study of Selected Commercial Banks in UgandaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Topic 24 - Hypothesis Tests and Confidence Intervals in Multiple Regression QuestionDocument10 pagesTopic 24 - Hypothesis Tests and Confidence Intervals in Multiple Regression Questionhamza omarNo ratings yet
- Causal Forecasting FinalDocument29 pagesCausal Forecasting FinalBharti GoyalNo ratings yet
- Time Series Analysis With R - Part IDocument23 pagesTime Series Analysis With R - Part Ithcm2011No ratings yet
- Chapter 8: Multiple and Logistic Regression: Openintro Statistics, 3Rd EditionDocument224 pagesChapter 8: Multiple and Logistic Regression: Openintro Statistics, 3Rd EditionNaimish AgarwalNo ratings yet
- An Evaluation of Employers' Acceptance of Online Degrees: A Perspective of The Ghanaian EmployerDocument31 pagesAn Evaluation of Employers' Acceptance of Online Degrees: A Perspective of The Ghanaian EmployerKen BNo ratings yet
- Econometrics I: Chapter 3: Two Variable Regression Model: The Problem of EstimationDocument35 pagesEconometrics I: Chapter 3: Two Variable Regression Model: The Problem of EstimationawidyasNo ratings yet
- AnovaDocument22 pagesAnovabioNo ratings yet
- African Military Coups D'etatDocument33 pagesAfrican Military Coups D'etataniurca250% (2)
- The Influence of Financial Management Using The Financial Freedom Approach, Financial Technology and Social Capital On The Income of Msmes in The Tourism SectorDocument14 pagesThe Influence of Financial Management Using The Financial Freedom Approach, Financial Technology and Social Capital On The Income of Msmes in The Tourism Sectorindex PubNo ratings yet
- ChinomonaRandMaziririET JBRMRDocument13 pagesChinomonaRandMaziririET JBRMRarry widodoNo ratings yet
- Final Exam-SolutionDocument11 pagesFinal Exam-SolutionTòng Lê ThanhNo ratings yet
- Machine Learning: Data SetDocument52 pagesMachine Learning: Data Setmb raj100% (1)